 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Distributed Control within a Curve Virtual Tube for a Robotic Swarm under Self-Localization Drift and Precise Relative Navigation
Paper and Code
May 27, 2022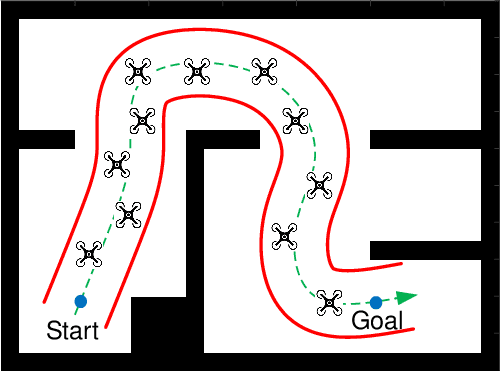
To guide the movement of a robotic swarm in a corridor-like environment, a curve virtual tube with no obstacle inside is designed in our previous work. This paper generalizes the controller design to the condition that all robots have self-localization drifts and precise relative navigation, where the flocking algorithm is introduced to reduce the negative impact of the self-localization drift. It is shown that the cohesion behavior and the velocity alignment behavior are able to reduce the influence of the position measurement drift and the velocity measurement error, respectively. For the convenience in practical use, a modified vector field controller with five control terms is put forward. Finally, the effectiveness of the proposed method is validated by numerical simulations and real experiments.