 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProxy Prompt: Endowing SAM and SAM 2 with Auto-Interactive-Prompt for Medical Segmentation
Feb 05, 2025In this paper, we aim to address the unmet demand for automated prompting and enhanced human-model interactions of SAM and SAM2 for the sake of promoting their widespread clinical adoption. Specifically, we propose Proxy Prompt (PP), auto-generated by leveraging non-target data with a pre-annotated mask. We devise a novel 3-step context-selection strategy for adaptively selecting the most representative contextual information from non-target data via vision mamba and selective maps, empowering the guiding capability of non-target image-mask pairs for segmentation on target image/video data. To reinforce human-model interactions in PP, we further propose a contextual colorization module via a dual-reverse cross-attention to enhance interactions between target features and contextual-embedding with amplifying distinctive features of user-defined object(s). Via extensive evaluations, our method achieves state-of-the-art performance on four public datasets and yields comparable results with fully-trained models, even when trained with only 16 image masks.
CMViM: Contrastive Masked Vim Autoencoder for 3D Multi-modal Representation Learning for AD classification
Mar 25, 2024Alzheimer's disease (AD) is an incurable neurodegenerative condition leading to cognitive and functional deterioration. Given the lack of a cure, prompt and precise AD diagnosis is vital, a complex process dependent on multiple factors and multi-modal data. While successful efforts have been made to integrate multi-modal representation learning into medical datasets, scant attention has been given to 3D medical images. In this paper, we propose Contrastive Masked Vim Autoencoder (CMViM), the first efficient representation learning method tailored for 3D multi-modal data. Our proposed framework is built on a masked Vim autoencoder to learn a unified multi-modal representation and long-dependencies contained in 3D medical images. We also introduce an intra-modal contrastive learning module to enhance the capability of the multi-modal Vim encoder for modeling the discriminative features in the same modality, and an inter-modal contrastive learning module to alleviate misaligned representation among modalities. Our framework consists of two main steps: 1) incorporate the Vision Mamba (Vim) into the mask autoencoder to reconstruct 3D masked multi-modal data efficiently. 2) align the multi-modal representations with contrastive learning mechanisms from both intra-modal and inter-modal aspects. Our framework is pre-trained and validated ADNI2 dataset and validated on the downstream task for AD classification. The proposed CMViM yields 2.7\% AUC performance improvement compared with other state-of-the-art methods.
Reliability of Robotic Ultrasound Scanning for Scoliosis Assessment in Comparison with Manual Scanning
May 07, 2022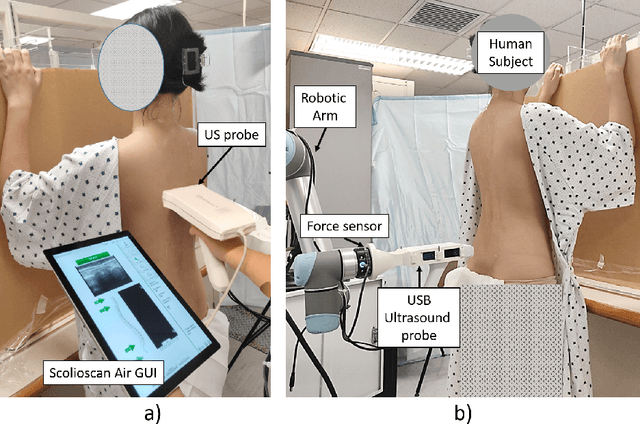

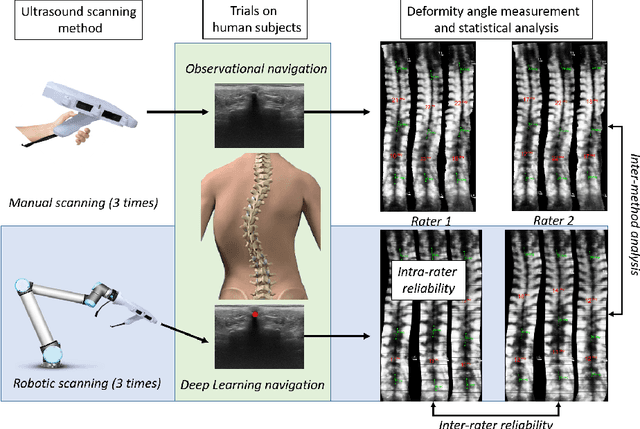

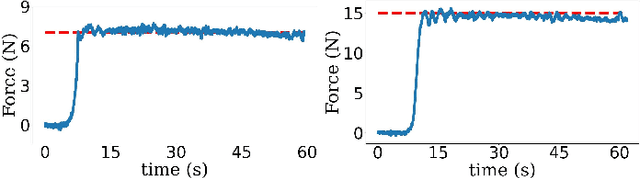
Background: Ultrasound (US) imaging for scoliosis assessment is challenging for a non-experienced operator. The robotic scanning was developed to follow a spinal curvature with deep learning and apply consistent forces to the patient' back. Methods: 23 scoliosis patients were scanned with US devices both, robotically and manually. Two human raters measured each subject's spinous process angles (SPA) on robotic and manual coronal images. Results: The robotic method showed high intra- (ICC > 0.85) and inter-rater (ICC > 0.77) reliabilities. Compared with the manual method, the robotic approach showed no significant difference (p < 0.05) when measuring coronal deformity angles. The MAD for intra-rater analysis lies within an acceptable range from 0 deg to 5 deg for a minimum of 86% and a maximum 97% of a total number of the measured angles. Conclusions: This study demonstrated that scoliosis deformity angles measured on ultrasound images obtained with robotic scanning are comparable to those obtained by manual scanning.
Ultrasound-Guided Assistive Robots for Scoliosis Assessment with Optimization-based Control and Variable Impedance
Mar 04, 2022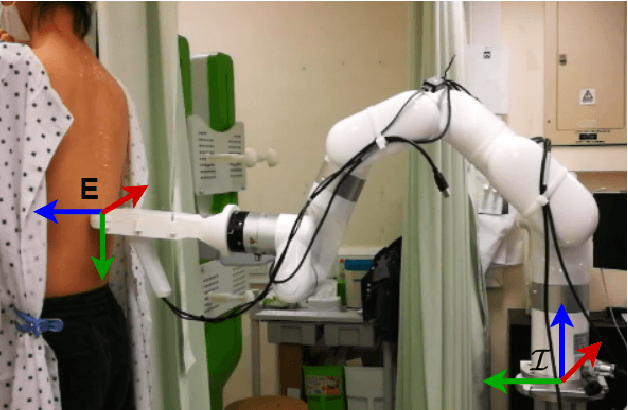
Assistive robots for healthcare have seen a growing demand due to the great potential of relieving medical practitioners from routine jobs. In this paper, we investigate the development of an optimization-based control framework for an ultrasound-guided assistive robot to perform scoliosis assessment. A conventional procedure for scoliosis assessment with ultrasound imaging typically requires a medical practitioner to slide an ultrasound probe along a patient's back. To automate this type of procedure, we need to consider multiple objectives, such as contact force, position, orientation, energy, posture, etc. To address the aforementioned components, we propose to formulate the control framework design as a quadratic programming problem with each objective weighed by its task priority subject to a set of equality and inequality constraints. In addition, as the robot needs to establish constant contact with the patient during spine scanning, we incorporate variable impedance regulation of the end-effector position and orientation in the control architecture to enhance safety and stability during the physical human-robot interaction. Wherein, the variable impedance gains are retrieved by learning from the medical expert's demonstrations. The proposed methodology is evaluated by conducting real-world experiments of autonomous scoliosis assessment with a robot manipulator xArm. The effectiveness is verified by the obtained coronal spinal images of both a phantom and a human subject.
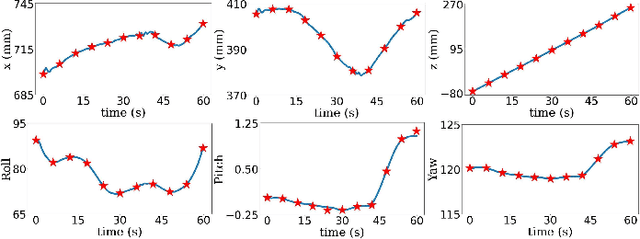
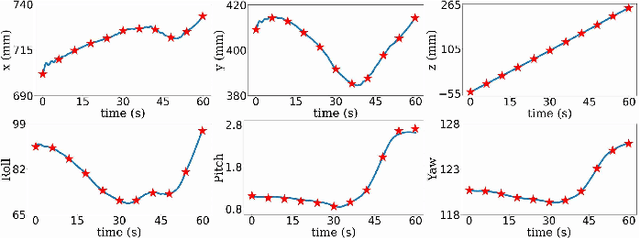
Follow the Curve: Robotic-Ultrasound Navigation with Learning Based Localization of Spinous Processes for Scoliosis Assessment
Sep 11, 2021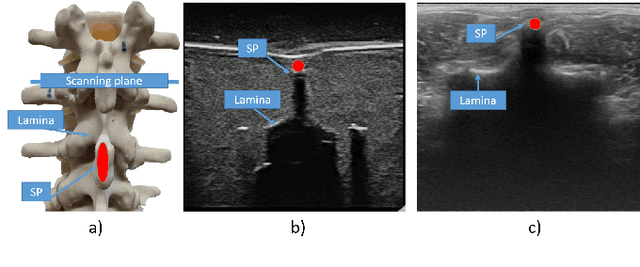
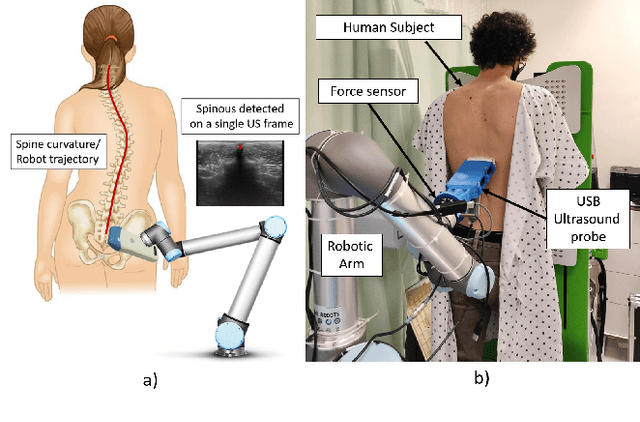
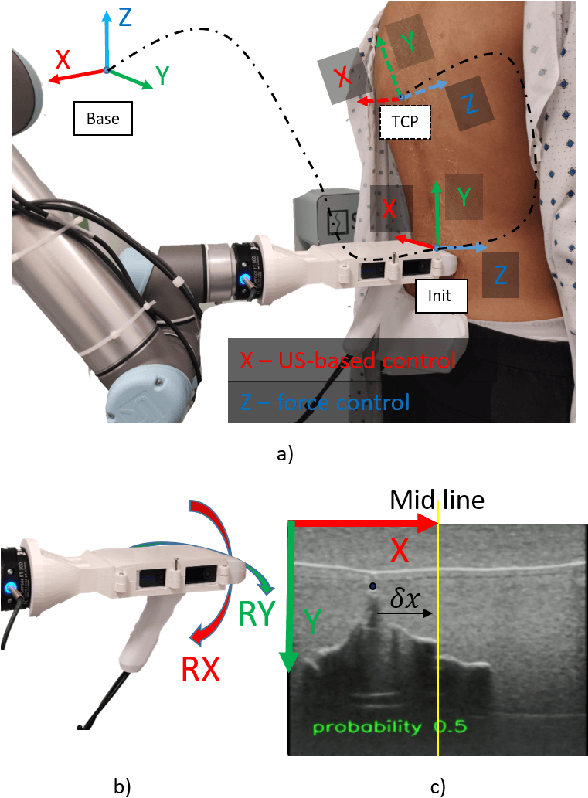
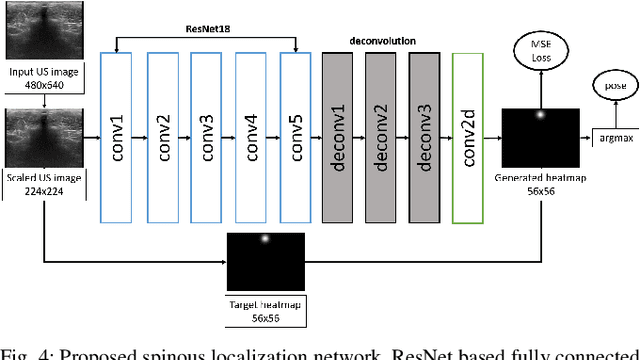
The scoliosis progression in adolescents requires close monitoring to timely take treatment measures. Ultrasound imaging is a radiation-free and low-cost alternative in scoliosis assessment to X-rays, which are typically used in clinical practice. However, ultrasound images are prone to speckle noises, making it challenging for sonographers to detect bony features and follow the spine's curvature. This paper introduces a robotic-ultrasound approach for spinal curvature tracking and automatic navigation. A fully connected network with deconvolutional heads is developed to locate the spinous process efficiently with real-time ultrasound images. We use this machine learning-based method to guide the motion of the robot-held ultrasound probe and follow the spinal curvature while capturing ultrasound images and correspondent position. We developed a new force-driven controller that automatically adjusts the probe's pose relative to the skin surface to ensure a good acoustic coupling between the probe and skin. After the scanning, the acquired data is used to reconstruct the coronal spinal image, where the deformity of the scoliosis spine can be assessed and measured. To evaluate the performance of our methodology, we conducted an experimental study with human subjects where the deviations from the image center during the robotized procedure are compared to that obtained from manual scanning. The angles of spinal deformity measured on spinal reconstruction images were similar for both methods, implying that they equally reflect human anatomy.