 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollow the Curve: Robotic-Ultrasound Navigation with Learning Based Localization of Spinous Processes for Scoliosis Assessment
Paper and Code
Sep 11, 2021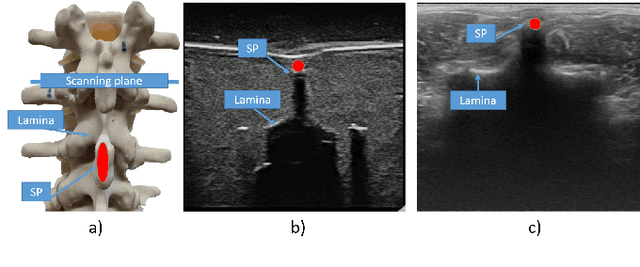
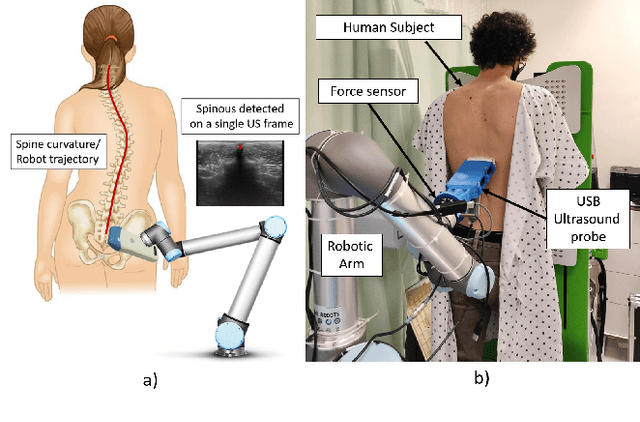
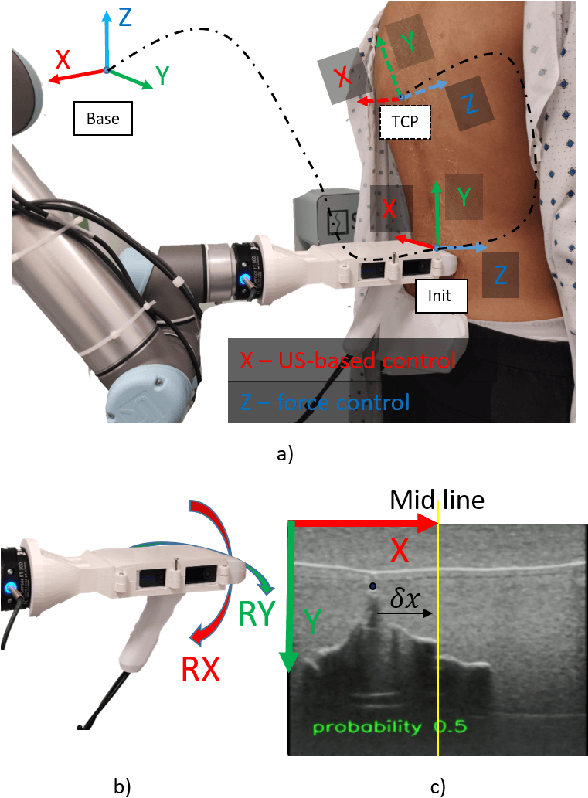
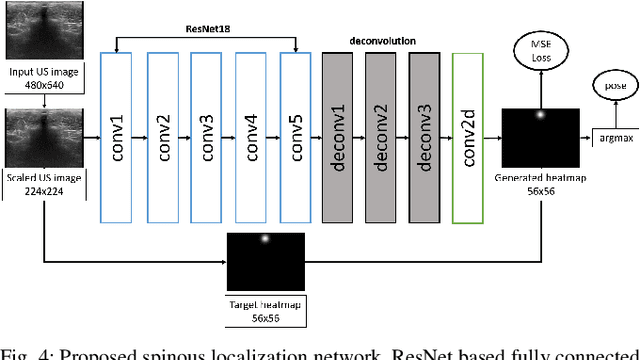
The scoliosis progression in adolescents requires close monitoring to timely take treatment measures. Ultrasound imaging is a radiation-free and low-cost alternative in scoliosis assessment to X-rays, which are typically used in clinical practice. However, ultrasound images are prone to speckle noises, making it challenging for sonographers to detect bony features and follow the spine's curvature. This paper introduces a robotic-ultrasound approach for spinal curvature tracking and automatic navigation. A fully connected network with deconvolutional heads is developed to locate the spinous process efficiently with real-time ultrasound images. We use this machine learning-based method to guide the motion of the robot-held ultrasound probe and follow the spinal curvature while capturing ultrasound images and correspondent position. We developed a new force-driven controller that automatically adjusts the probe's pose relative to the skin surface to ensure a good acoustic coupling between the probe and skin. After the scanning, the acquired data is used to reconstruct the coronal spinal image, where the deformity of the scoliosis spine can be assessed and measured. To evaluate the performance of our methodology, we conducted an experimental study with human subjects where the deviations from the image center during the robotized procedure are compared to that obtained from manual scanning. The angles of spinal deformity measured on spinal reconstruction images were similar for both methods, implying that they equally reflect human anatomy.