 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitecture-Optimization Co-Design for Physics-Informed Neural Networks Via Attentive Representations and Conflict-Resolved Gradients
Jan 19, 2026Physics-Informed Neural Networks (PINNs) provide a learning-based framework for solving partial differential equations (PDEs) by embedding governing physical laws into neural network training. In practice, however, their performance is often hindered by limited representational capacity and optimization difficulties caused by competing physical constraints and conflicting gradients. In this work, we study PINN training from a unified architecture-optimization perspective. We first propose a layer-wise dynamic attention mechanism to enhance representational flexibility, resulting in the Layer-wise Dynamic Attention PINN (LDA-PINN). We then reformulate PINN training as a multi-task learning problem and introduce a conflict-resolved gradient update strategy to alleviate gradient interference, leading to the Gradient-Conflict-Resolved PINN (GC-PINN). By integrating these two components, we develop the Architecture-Conflict-Resolved PINN (ACR-PINN), which combines attentive representations with conflict-aware optimization while preserving the standard PINN loss formulation. Extensive experiments on benchmark PDEs, including the Burgers, Helmholtz, Klein-Gordon, and lid-driven cavity flow problems, demonstrate that ACR-PINN achieves faster convergence and significantly lower relative $L_2$ and $L_\infty$ errors than standard PINNs. These results highlight the effectiveness of architecture-optimization co-design for improving the robustness and accuracy of PINN-based solvers.
ROAD: Responsibility-Oriented Reward Design for Reinforcement Learning in Autonomous Driving
May 30, 2025Reinforcement learning (RL) in autonomous driving employs a trial-and-error mechanism, enhancing robustness in unpredictable environments. However, crafting effective reward functions remains challenging, as conventional approaches rely heavily on manual design and demonstrate limited efficacy in complex scenarios. To address this issue, this study introduces a responsibility-oriented reward function that explicitly incorporates traffic regulations into the RL framework. Specifically, we introduced a Traffic Regulation Knowledge Graph and leveraged Vision-Language Models alongside Retrieval-Augmented Generation techniques to automate reward assignment. This integration guides agents to adhere strictly to traffic laws, thus minimizing rule violations and optimizing decision-making performance in diverse driving conditions. Experimental validations demonstrate that the proposed methodology significantly improves the accuracy of assigning accident responsibilities and effectively reduces the agent's liability in traffic incidents.
Leverage Knowledge Graph and Large Language Model for Law Article Recommendation: A Case Study of Chinese Criminal Law
Oct 07, 2024


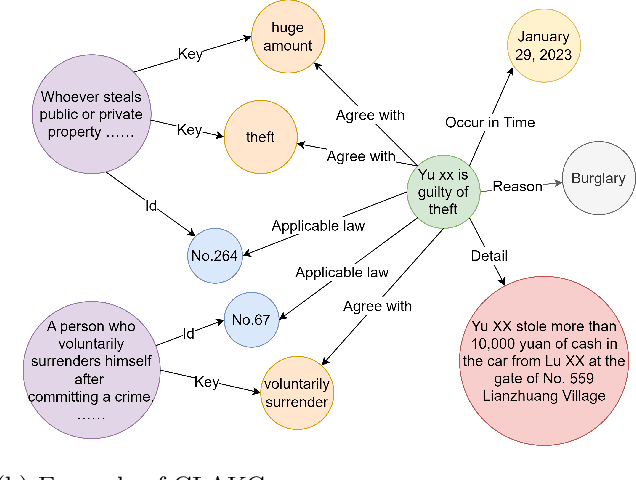
Court efficiency is vital for social stability. However, in most countries around the world, the grassroots courts face case backlogs, with decisions relying heavily on judicial personnel's cognitive labor, lacking intelligent tools to improve efficiency. To address this issue, we propose an efficient law article recommendation approach utilizing a Knowledge Graph (KG) and a Large Language Model (LLM). Firstly, we propose a Case-Enhanced Law Article Knowledge Graph (CLAKG) as a database to store current law statutes, historical case information, and correspondence between law articles and historical cases. Additionally, we introduce an automated CLAKG construction method based on LLM. On this basis, we propose a closed-loop law article recommendation method. Finally, through a series of experiments using judgment documents from the website "China Judgements Online", we have improved the accuracy of law article recommendation in cases from 0.549 to 0.694, demonstrating that our proposed method significantly outperforms baseline approaches.
FACT: Feature Adaptive Continual-learning Tracker for Multiple Object Tracking
Sep 12, 2024



Multiple object tracking (MOT) involves identifying multiple targets and assigning them corresponding IDs within a video sequence, where occlusions are often encountered. Recent methods address occlusions using appearance cues through online learning techniques to improve adaptivity or offline learning techniques to utilize temporal information from videos. However, most existing online learning-based MOT methods are unable to learn from all past tracking information to improve adaptivity on long-term occlusions while maintaining real-time tracking speed. On the other hand, temporal information-based offline learning methods maintain a long-term memory to store past tracking information, but this approach restricts them to use only local past information during tracking. To address these challenges, we propose a new MOT framework called the Feature Adaptive Continual-learning Tracker (FACT), which enables real-time tracking and feature learning for targets by utilizing all past tracking information. We demonstrate that the framework can be integrated with various state-of-the-art feature-based trackers, thereby improving their tracking ability. Specifically, we develop the feature adaptive continual-learning (FAC) module, a neural network that can be trained online to learn features adaptively using all past tracking information during tracking. Moreover, we also introduce a two-stage association module specifically designed for the proposed continual learning-based tracking. Extensive experiment results demonstrate that the proposed method achieves state-of-the-art online tracking performance on MOT17 and MOT20 benchmarks. The code will be released upon acceptance.
Improved physics-informed neural network in mitigating gradient related failures
Jul 28, 2024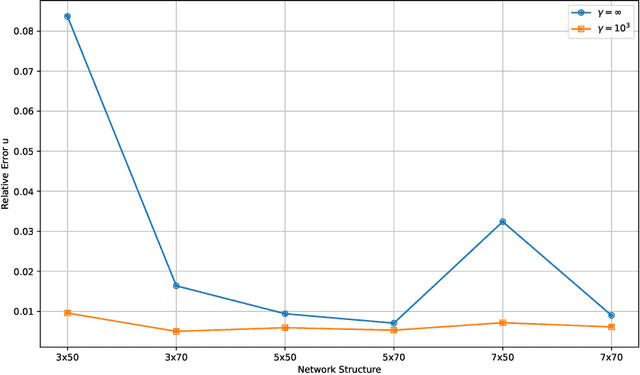
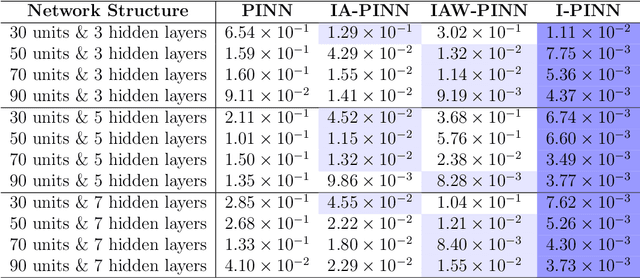
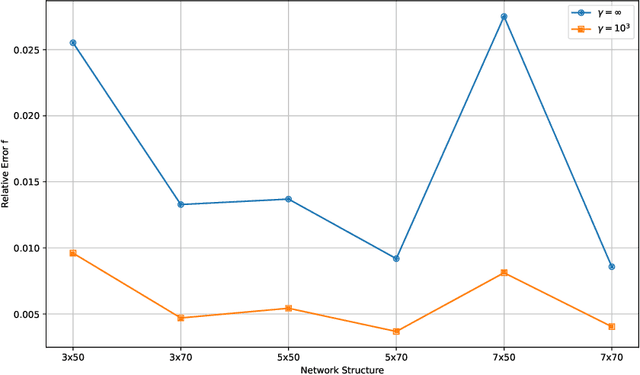

Physics-informed neural networks (PINNs) integrate fundamental physical principles with advanced data-driven techniques, driving significant advancements in scientific computing. However, PINNs face persistent challenges with stiffness in gradient flow, which limits their predictive capabilities. This paper presents an improved PINN (I-PINN) to mitigate gradient-related failures. The core of I-PINN is to combine the respective strengths of neural networks with an improved architecture and adaptive weights containingupper bounds. The capability to enhance accuracy by at least one order of magnitude and accelerate convergence, without introducing extra computational complexity relative to the baseline model, is achieved by I-PINN. Numerical experiments with a variety of benchmarks illustrate the improved accuracy and generalization of I-PINN. The supporting data and code are accessible at https://github.com/PanChengN/I-PINN.git, enabling broader research engagement.