 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeWork-R1: Coevolving Safety and Intelligence under the AI-45$^{\circ}$ Law
Jul 24, 2025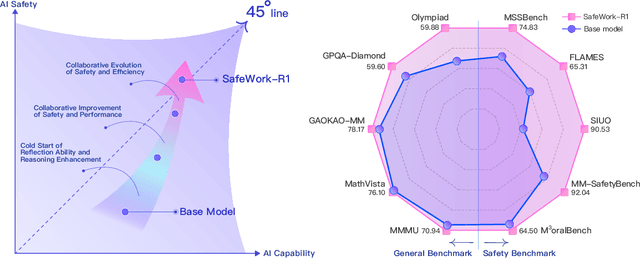
We introduce SafeWork-R1, a cutting-edge multimodal reasoning model that demonstrates the coevolution of capabilities and safety. It is developed by our proposed SafeLadder framework, which incorporates large-scale, progressive, safety-oriented reinforcement learning post-training, supported by a suite of multi-principled verifiers. Unlike previous alignment methods such as RLHF that simply learn human preferences, SafeLadder enables SafeWork-R1 to develop intrinsic safety reasoning and self-reflection abilities, giving rise to safety `aha' moments. Notably, SafeWork-R1 achieves an average improvement of $46.54\%$ over its base model Qwen2.5-VL-72B on safety-related benchmarks without compromising general capabilities, and delivers state-of-the-art safety performance compared to leading proprietary models such as GPT-4.1 and Claude Opus 4. To further bolster its reliability, we implement two distinct inference-time intervention methods and a deliberative search mechanism, enforcing step-level verification. Finally, we further develop SafeWork-R1-InternVL3-78B, SafeWork-R1-DeepSeek-70B, and SafeWork-R1-Qwen2.5VL-7B. All resulting models demonstrate that safety and capability can co-evolve synergistically, highlighting the generalizability of our framework in building robust, reliable, and trustworthy general-purpose AI.
Revisiting Large Language Model Pruning using Neuron Semantic Attribution
Mar 03, 2025Model pruning technique is vital for accelerating large language models by reducing their size and computational requirements. However, the generalizability of existing pruning methods across diverse datasets and tasks remains unclear. Thus, we conduct extensive evaluations on 24 datasets and 4 tasks using popular pruning methods. Based on these evaluations, we find and then investigate that calibration set greatly affect the performance of pruning methods. In addition, we surprisingly find a significant performance drop of existing pruning methods in sentiment classification tasks. To understand the link between performance drop and pruned neurons, we propose Neuron Semantic Attribution, which learns to associate each neuron with specific semantics. This method first makes the unpruned neurons of LLMs explainable.
Adaptive Pruning of Pretrained Transformer via Differential Inclusions
Jan 06, 2025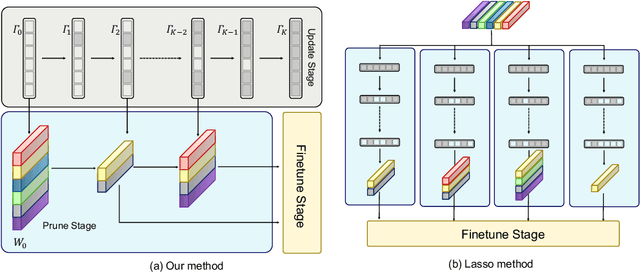
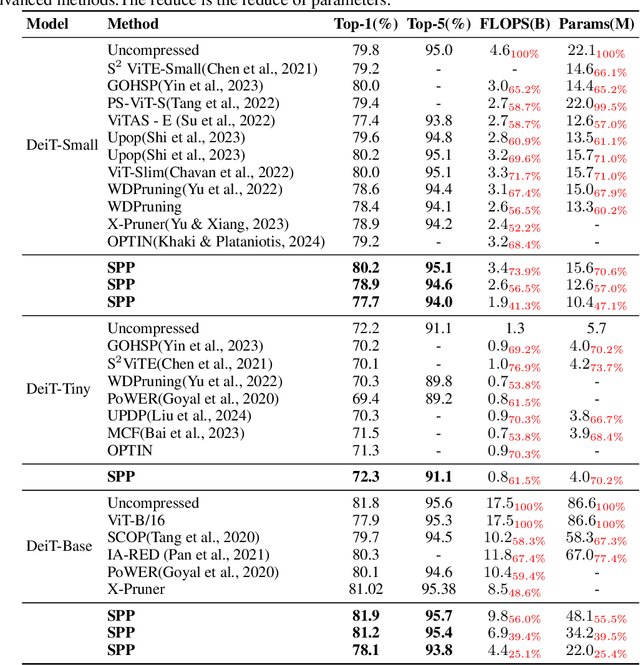
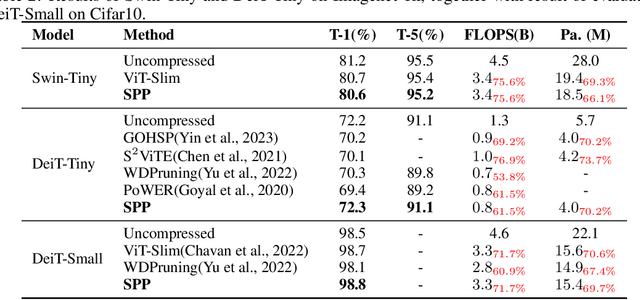
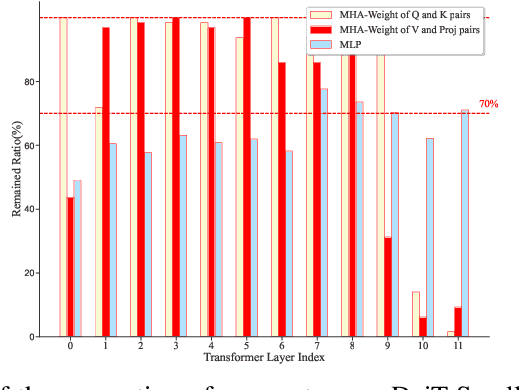
Large transformers have demonstrated remarkable success, making it necessary to compress these models to reduce inference costs while preserving their perfor-mance. Current compression algorithms prune transformers at fixed compression ratios, requiring a unique pruning process for each ratio, which results in high computational costs. In contrast, we propose pruning of pretrained transformers at any desired ratio within a single pruning stage, based on a differential inclusion for a mask parameter. This dynamic can generate the whole regularization solution path of the mask parameter, whose support set identifies the network structure. Therefore, the solution path identifies a Transformer weight family with various sparsity levels, offering greater flexibility and customization. In this paper, we introduce such an effective pruning method, termed SPP (Solution Path Pruning). To achieve effective pruning, we segment the transformers into paired modules, including query-key pairs, value-projection pairs, and sequential linear layers, and apply low-rank compression to these pairs, maintaining the output structure while enabling structural compression within the inner states. Extensive experiments conducted on various well-known transformer backbones have demonstrated the efficacy of SPP.
Object-Centric Multiple Object Tracking
Sep 05, 2023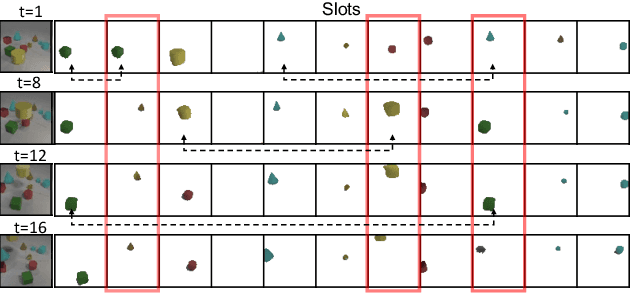
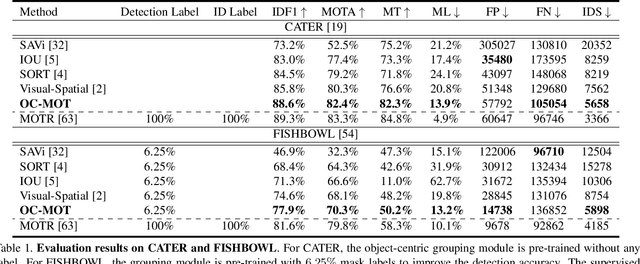
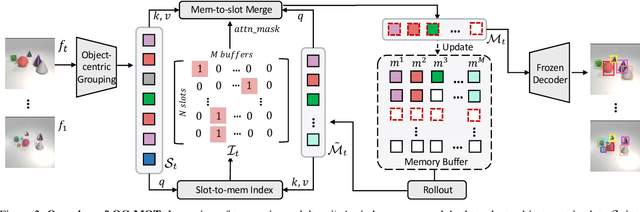
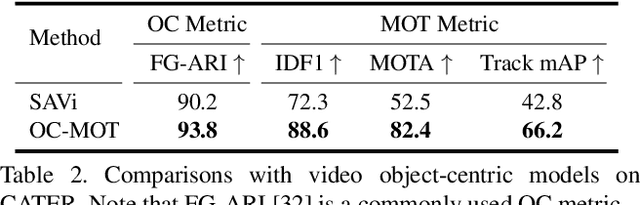
Unsupervised object-centric learning methods allow the partitioning of scenes into entities without additional localization information and are excellent candidates for reducing the annotation burden of multiple-object tracking (MOT) pipelines. Unfortunately, they lack two key properties: objects are often split into parts and are not consistently tracked over time. In fact, state-of-the-art models achieve pixel-level accuracy and temporal consistency by relying on supervised object detection with additional ID labels for the association through time. This paper proposes a video object-centric model for MOT. It consists of an index-merge module that adapts the object-centric slots into detection outputs and an object memory module that builds complete object prototypes to handle occlusions. Benefited from object-centric learning, we only require sparse detection labels (0%-6.25%) for object localization and feature binding. Relying on our self-supervised Expectation-Maximization-inspired loss for object association, our approach requires no ID labels. Our experiments significantly narrow the gap between the existing object-centric model and the fully supervised state-of-the-art and outperform several unsupervised trackers.