 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApertus: Democratizing Open and Compliant LLMs for Global Language Environments
Sep 17, 2025
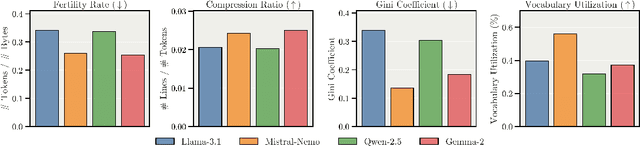

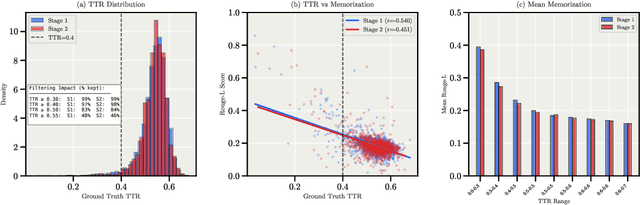
We present Apertus, a fully open suite of large language models (LLMs) designed to address two systemic shortcomings in today's open model ecosystem: data compliance and multilingual representation. Unlike many prior models that release weights without reproducible data pipelines or regard for content-owner rights, Apertus models are pretrained exclusively on openly available data, retroactively respecting robots.txt exclusions and filtering for non-permissive, toxic, and personally identifiable content. To mitigate risks of memorization, we adopt the Goldfish objective during pretraining, strongly suppressing verbatim recall of data while retaining downstream task performance. The Apertus models also expand multilingual coverage, training on 15T tokens from over 1800 languages, with ~40% of pretraining data allocated to non-English content. Released at 8B and 70B scales, Apertus approaches state-of-the-art results among fully open models on multilingual benchmarks, rivalling or surpassing open-weight counterparts. Beyond model weights, we release all scientific artifacts from our development cycle with a permissive license, including data preparation scripts, checkpoints, evaluation suites, and training code, enabling transparent audit and extension.
Positional Fragility in LLMs: How Offset Effects Reshape Our Understanding of Memorization Risks
May 19, 2025Large language models are known to memorize parts of their training data, posing risk of copyright violations. To systematically examine this risk, we pretrain language models (1B/3B/8B) from scratch on 83B tokens, mixing web-scale data with public domain books used to simulate copyrighted content at controlled frequencies at lengths at least ten times longer than prior work. We thereby identified the offset effect, a phenomenon characterized by two key findings: (1) verbatim memorization is most strongly triggered by short prefixes drawn from the beginning of the context window, with memorization decreasing counterintuitively as prefix length increases; and (2) a sharp decline in verbatim recall when prefix begins offset from the initial tokens of the context window. We attribute this to positional fragility: models rely disproportionately on the earliest tokens in their context window as retrieval anchors, making them sensitive to even slight shifts. We further observe that when the model fails to retrieve memorized content, it often produces degenerated text. Leveraging these findings, we show that shifting sensitive data deeper into the context window suppresses both extractable memorization and degeneration. Our results suggest that positional offset is a critical and previously overlooked axis for evaluating memorization risks, since prior work implicitly assumed uniformity by probing only from the beginning of training sequences.
Uplifting Range-View-based 3D Semantic Segmentation in Real-Time with Multi-Sensor Fusion
Jul 12, 2024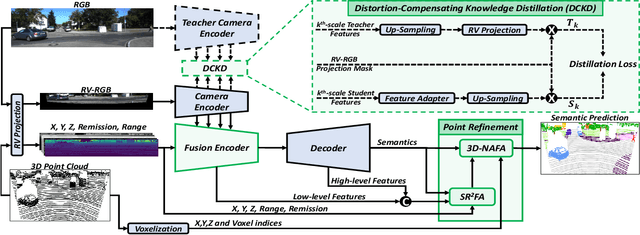
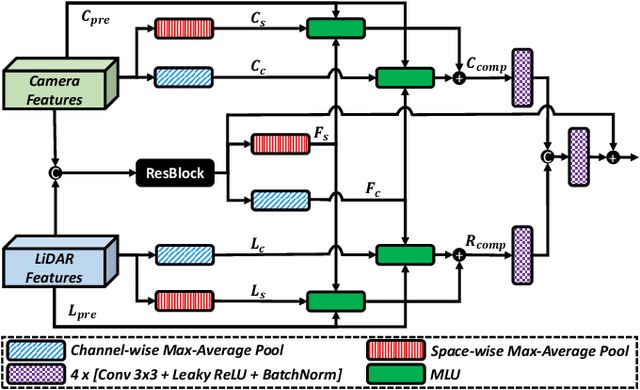
Range-View(RV)-based 3D point cloud segmentation is widely adopted due to its compact data form. However, RV-based methods fall short in providing robust segmentation for the occluded points and suffer from distortion of projected RGB images due to the sparse nature of 3D point clouds. To alleviate these problems, we propose a new LiDAR and Camera Range-view-based 3D point cloud semantic segmentation method (LaCRange). Specifically, a distortion-compensating knowledge distillation (DCKD) strategy is designed to remedy the adverse effect of RV projection of RGB images. Moreover, a context-based feature fusion module is introduced for robust and preservative sensor fusion. Finally, in order to address the limited resolution of RV and its insufficiency of 3D topology, a new point refinement scheme is devised for proper aggregation of features in 2D and augmentation of point features in 3D. We evaluated the proposed method on large-scale autonomous driving datasets \ie SemanticKITTI and nuScenes. In addition to being real-time, the proposed method achieves state-of-the-art results on nuScenes benchmark
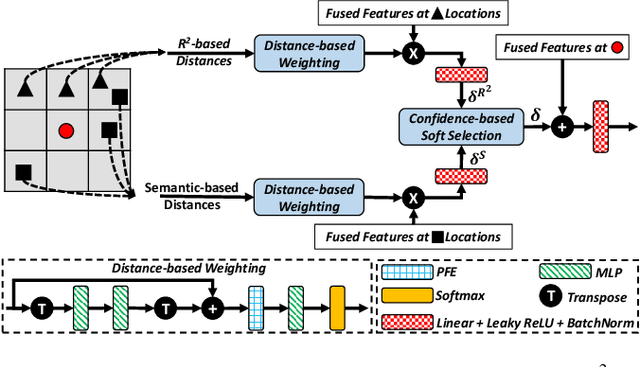
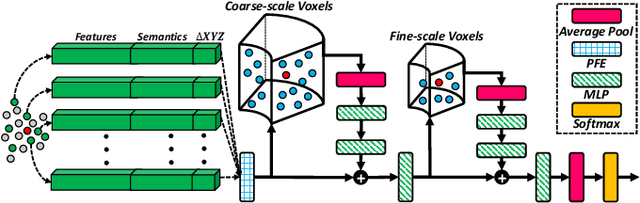
Video Frame Interpolation for Polarization via Swin-Transformer
Jun 17, 2024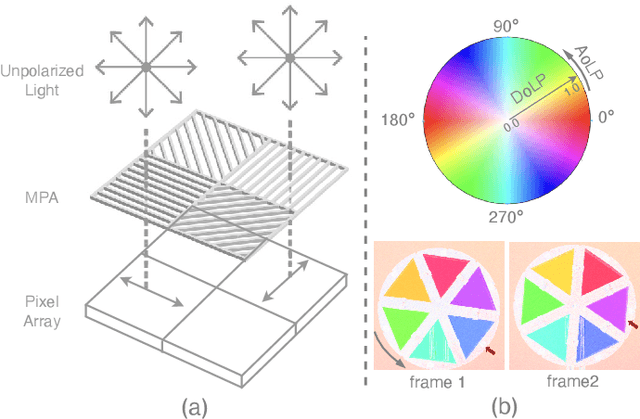
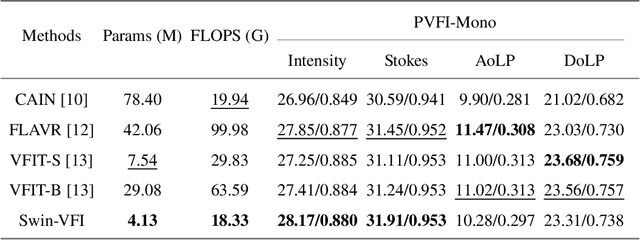
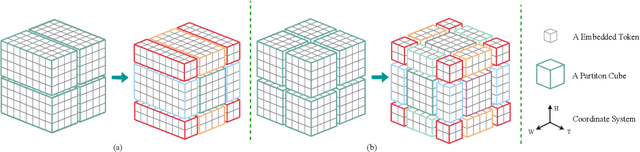
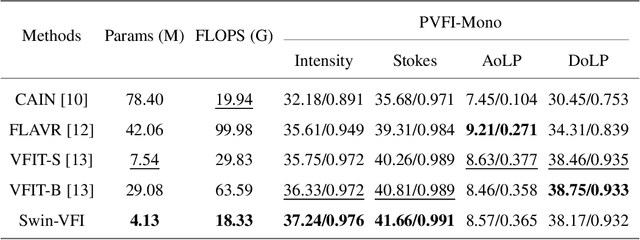
Video Frame Interpolation (VFI) has been extensively explored and demonstrated, yet its application to polarization remains largely unexplored. Due to the selective transmission of light by polarized filters, longer exposure times are typically required to ensure sufficient light intensity, which consequently lower the temporal sample rates. Furthermore, because polarization reflected by objects varies with shooting perspective, focusing solely on estimating pixel displacement is insufficient to accurately reconstruct the intermediate polarization. To tackle these challenges, this study proposes a multi-stage and multi-scale network called Swin-VFI based on the Swin-Transformer and introduces a tailored loss function to facilitate the network's understanding of polarization changes. To ensure the practicality of our proposed method, this study evaluates its interpolated frames in Shape from Polarization (SfP) and Human Shape Reconstruction tasks, comparing them with other state-of-the-art methods such as CAIN, FLAVR, and VFIT. Experimental results demonstrate our approach's superior reconstruction accuracy across all tasks.
Analyze the Robustness of Classifiers under Label Noise
Dec 12, 2023This study explores the robustness of label noise classifiers, aiming to enhance model resilience against noisy data in complex real-world scenarios. Label noise in supervised learning, characterized by erroneous or imprecise labels, significantly impairs model performance. This research focuses on the increasingly pertinent issue of label noise's impact on practical applications. Addressing the prevalent challenge of inaccurate training data labels, we integrate adversarial machine learning (AML) and importance reweighting techniques. Our approach involves employing convolutional neural networks (CNN) as the foundational model, with an emphasis on parameter adjustment for individual training samples. This strategy is designed to heighten the model's focus on samples critically influencing performance.
Analyze the robustness of three NMF algorithms (Robust NMF with L1 norm, L2-1 norm NMF, L2 NMF)
Dec 03, 2023Non-negative matrix factorization (NMF) and its variants have been widely employed in clustering and classification tasks (Long, & Jian , 2021). However, noises can seriously affect the results of our experiments. Our research is dedicated to investigating the noise robustness of non-negative matrix factorization (NMF) in the face of different types of noise. Specifically, we adopt three different NMF algorithms, namely L1 NMF, L2 NMF, and L21 NMF, and use the ORL and YaleB data sets to simulate a series of experiments with salt-and-pepper noise and Block-occlusion noise separately. In the experiment, we use a variety of evaluation indicators, including root mean square error (RMSE), accuracy (ACC), and normalized mutual information (NMI), to evaluate the performance of different NMF algorithms in noisy environments. Through these indicators, we quantify the resistance of NMF algorithms to noise and gain insights into their feasibility in practical applications.
AOP-Net: All-in-One Perception Network for Joint LiDAR-based 3D Object Detection and Panoptic Segmentation
Feb 02, 2023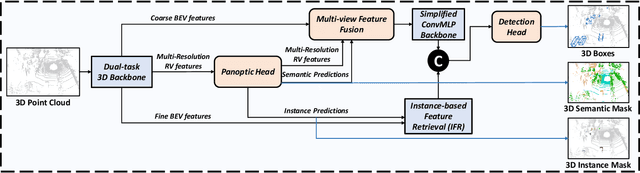
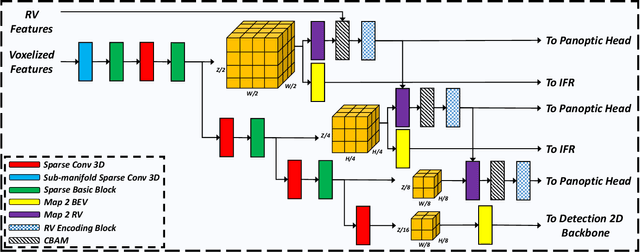
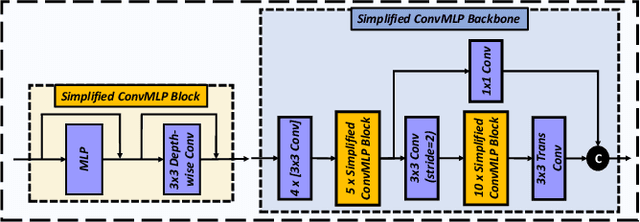
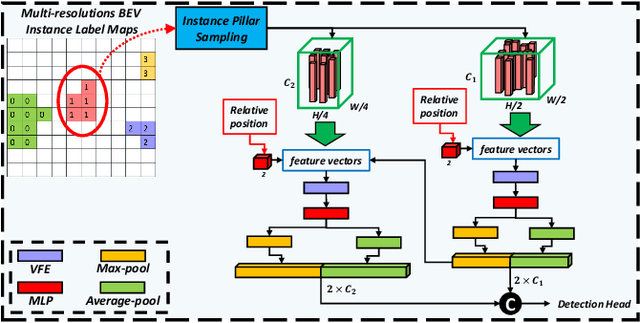
LiDAR-based 3D object detection and panoptic segmentation are two crucial tasks in the perception systems of autonomous vehicles and robots. In this paper, we propose All-in-One Perception Network (AOP-Net), a LiDAR-based multi-task framework that combines 3D object detection and panoptic segmentation. In this method, a dual-task 3D backbone is developed to extract both panoptic- and detection-level features from the input LiDAR point cloud. Also, a new 2D backbone that intertwines Multi-Layer Perceptron (MLP) and convolution layers is designed to further improve the detection task performance. Finally, a novel module is proposed to guide the detection head by recovering useful features discarded during down-sampling operations in the 3D backbone. This module leverages estimated instance segmentation masks to recover detailed information from each candidate object. The AOP-Net achieves state-of-the-art performance for published works on the nuScenes benchmark for both 3D object detection and panoptic segmentation tasks. Also, experiments show that our method easily adapts to and significantly improves the performance of any BEV-based 3D object detection method.
A Versatile Multi-View Framework for LiDAR-based 3D Object Detection with Guidance from Panoptic Segmentation
Mar 04, 2022

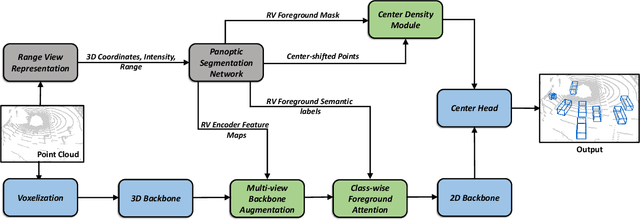
3D object detection using LiDAR data is an indispensable component for autonomous driving systems. Yet, only a few LiDAR-based 3D object detection methods leverage segmentation information to further guide the detection process. In this paper, we propose a novel multi-task framework that jointly performs 3D object detection and panoptic segmentation. In our method, the 3D object detection backbone in Bird's-Eye-View (BEV) plane is augmented by the injection of Range-View (RV) feature maps from the 3D panoptic segmentation backbone. This enables the detection backbone to leverage multi-view information to address the shortcomings of each projection view. Furthermore, foreground semantic information is incorporated to ease the detection task by highlighting the locations of each object class in the feature maps. Finally, a new center density heatmap generated based on the instance-level information further guides the detection backbone by suggesting possible box center locations for objects. Our method works with any BEV-based 3D object detection method, and as shown by extensive experiments on the nuScenes dataset, it provides significant performance gains. Notably, the proposed method based on a single-stage CenterPoint 3D object detection network achieved state-of-the-art performance on nuScenes 3D Detection Benchmark with 67.3 NDS.
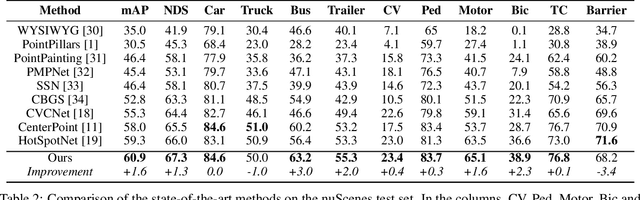
CPSeg: Cluster-free Panoptic Segmentation of 3D LiDAR Point Clouds
Nov 02, 2021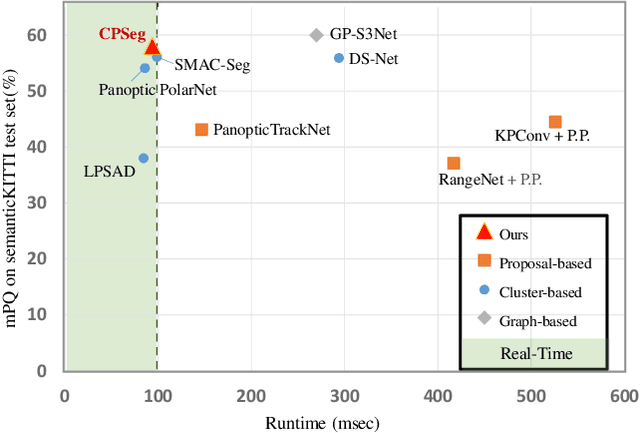
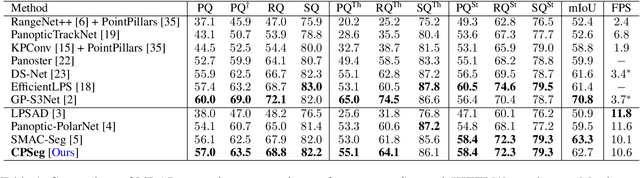
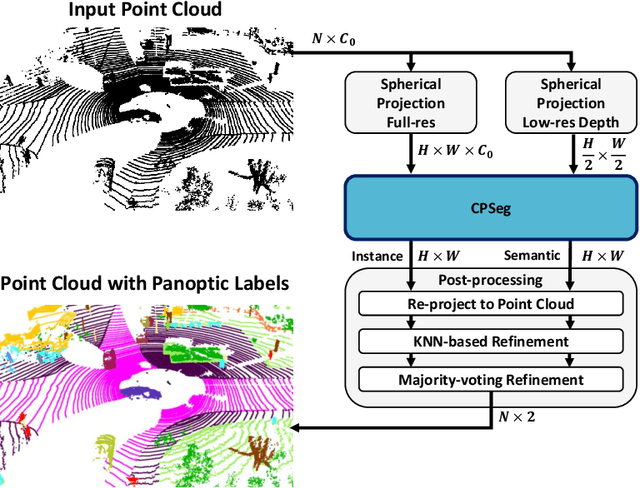
A fast and accurate panoptic segmentation system for LiDAR point clouds is crucial for autonomous driving vehicles to understand the surrounding objects and scenes. Existing approaches usually rely on proposals or clustering to segment foreground instances. As a result, they struggle to achieve real-time performance. In this paper, we propose a novel real-time end-to-end panoptic segmentation network for LiDAR point clouds, called CPSeg. In particular, CPSeg comprises a shared encoder, a dual decoder, a task-aware attention module (TAM) and a cluster-free instance segmentation head. TAM is designed to enforce these two decoders to learn rich task-aware features for semantic and instance embedding. Moreover, CPSeg incorporates a new cluster-free instance segmentation head to dynamically pillarize foreground points according to the learned embedding. Then, it acquires instance labels by finding connected pillars with a pairwise embedding comparison. Thus, the conventional proposal-based or clustering-based instance segmentation is transformed into a binary segmentation problem on the pairwise embedding comparison matrix. To help the network regress instance embedding, a fast and deterministic depth completion algorithm is proposed to calculate surface normal of each point cloud in real-time. The proposed method is benchmarked on two large-scale autonomous driving datasets, namely, SemanticKITTI and nuScenes. Notably, extensive experimental results show that CPSeg achieves the state-of-the-art results among real-time approaches on both datasets.
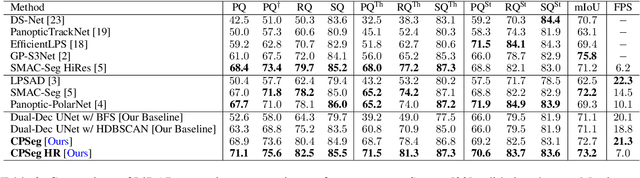
SMAC-Seg: LiDAR Panoptic Segmentation via Sparse Multi-directional Attention Clustering
Aug 31, 2021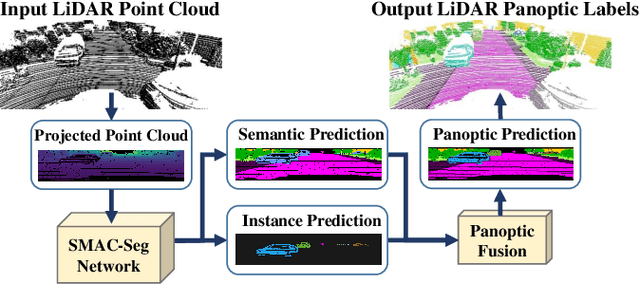
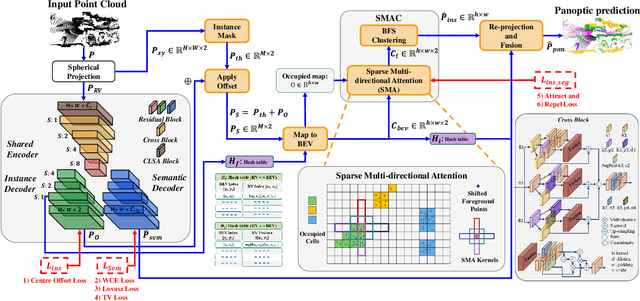
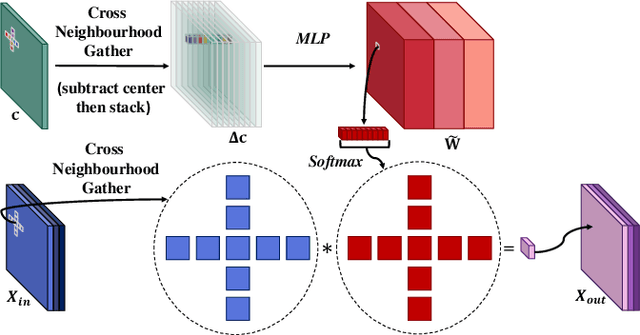
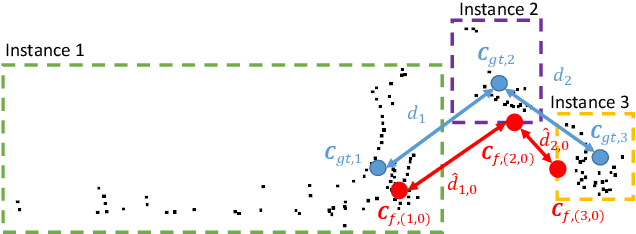
Panoptic segmentation aims to address semantic and instance segmentation simultaneously in a unified framework. However, an efficient solution of panoptic segmentation in applications like autonomous driving is still an open research problem. In this work, we propose a novel LiDAR-based panoptic system, called SMAC-Seg. We present a learnable sparse multi-directional attention clustering to segment multi-scale foreground instances. SMAC-Seg is a real-time clustering-based approach, which removes the complex proposal network to segment instances. Most existing clustering-based methods use the difference of the predicted and ground truth center offset as the only loss to supervise the instance centroid regression. However, this loss function only considers the centroid of the current object, but its relative position with respect to the neighbouring objects is not considered when learning to cluster. Thus, we propose to use a novel centroid-aware repel loss as an additional term to effectively supervise the network to differentiate each object cluster with its neighbours. Our experimental results show that SMAC-Seg achieves state-of-the-art performance among all real-time deployable networks on both large-scale public SemanticKITTI and nuScenes panoptic segmentation datasets.