 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSMAC-Seg: LiDAR Panoptic Segmentation via Sparse Multi-directional Attention Clustering
Paper and Code
Aug 31, 2021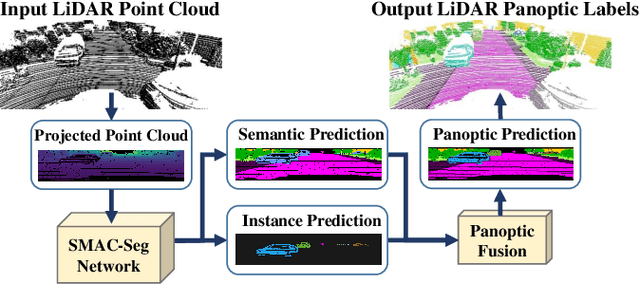
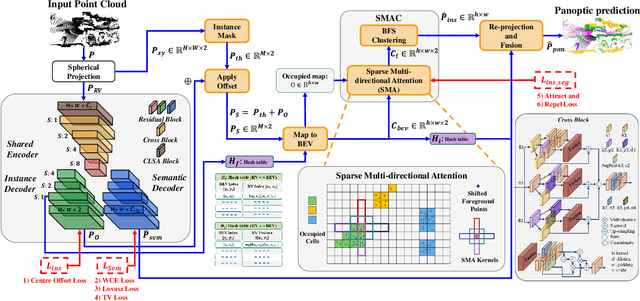
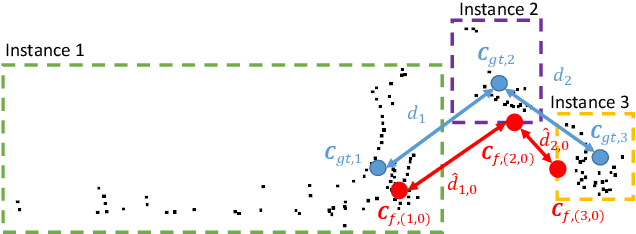
Panoptic segmentation aims to address semantic and instance segmentation simultaneously in a unified framework. However, an efficient solution of panoptic segmentation in applications like autonomous driving is still an open research problem. In this work, we propose a novel LiDAR-based panoptic system, called SMAC-Seg. We present a learnable sparse multi-directional attention clustering to segment multi-scale foreground instances. SMAC-Seg is a real-time clustering-based approach, which removes the complex proposal network to segment instances. Most existing clustering-based methods use the difference of the predicted and ground truth center offset as the only loss to supervise the instance centroid regression. However, this loss function only considers the centroid of the current object, but its relative position with respect to the neighbouring objects is not considered when learning to cluster. Thus, we propose to use a novel centroid-aware repel loss as an additional term to effectively supervise the network to differentiate each object cluster with its neighbours. Our experimental results show that SMAC-Seg achieves state-of-the-art performance among all real-time deployable networks on both large-scale public SemanticKITTI and nuScenes panoptic segmentation datasets.