 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICON: Indirect Prompt Injection Defense for Agents based on Inference-Time Correction
Feb 24, 2026Large Language Model (LLM) agents are susceptible to Indirect Prompt Injection (IPI) attacks, where malicious instructions in retrieved content hijack the agent's execution. Existing defenses typically rely on strict filtering or refusal mechanisms, which suffer from a critical limitation: over-refusal, prematurely terminating valid agentic workflows. We propose ICON, a probing-to-mitigation framework that neutralizes attacks while preserving task continuity. Our key insight is that IPI attacks leave distinct over-focusing signatures in the latent space. We introduce a Latent Space Trace Prober to detect attacks based on high intensity scores. Subsequently, a Mitigating Rectifier performs surgical attention steering that selectively manipulate adversarial query key dependencies while amplifying task relevant elements to restore the LLM's functional trajectory. Extensive evaluations on multiple backbones show that ICON achieves a competitive 0.4% ASR, matching commercial grade detectors, while yielding a over 50% task utility gain. Furthermore, ICON demonstrates robust Out of Distribution(OOD) generalization and extends effectively to multi-modal agents, establishing a superior balance between security and efficiency.
AdapTools: Adaptive Tool-based Indirect Prompt Injection Attacks on Agentic LLMs
Feb 24, 2026The integration of external data services (e.g., Model Context Protocol, MCP) has made large language model-based agents increasingly powerful for complex task execution. However, this advancement introduces critical security vulnerabilities, particularly indirect prompt injection (IPI) attacks. Existing attack methods are limited by their reliance on static patterns and evaluation on simple language models, failing to address the fast-evolving nature of modern AI agents. We introduce AdapTools, a novel adaptive IPI attack framework that selects stealthier attack tools and generates adaptive attack prompts to create a rigorous security evaluation environment. Our approach comprises two key components: (1) Adaptive Attack Strategy Construction, which develops transferable adversarial strategies for prompt optimization, and (2) Attack Enhancement, which identifies stealthy tools capable of circumventing task-relevance defenses. Comprehensive experimental evaluation shows that AdapTools achieves a 2.13 times improvement in attack success rate while degrading system utility by a factor of 1.78. Notably, the framework maintains its effectiveness even against state-of-the-art defense mechanisms. Our method advances the understanding of IPI attacks and provides a useful reference for future research.
Occlusion-Aware Self-Supervised Monocular Depth Estimation for Weak-Texture Endoscopic Images
Apr 24, 2025
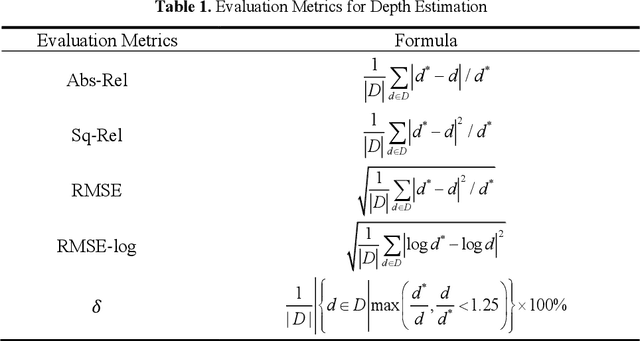


We propose a self-supervised monocular depth estimation network tailored for endoscopic scenes, aiming to infer depth within the gastrointestinal tract from monocular images. Existing methods, though accurate, typically assume consistent illumination, which is often violated due to dynamic lighting and occlusions caused by GI motility. These variations lead to incorrect geometric interpretations and unreliable self-supervised signals, degrading depth reconstruction quality. To address this, we introduce an occlusion-aware self-supervised framework. First, we incorporate an occlusion mask for data augmentation, generating pseudo-labels by simulating viewpoint-dependent occlusion scenarios. This enhances the model's ability to learn robust depth features under partial visibility. Second, we leverage semantic segmentation guided by non-negative matrix factorization, clustering convolutional activations to generate pseudo-labels in texture-deprived regions, thereby improving segmentation accuracy and mitigating information loss from lighting changes. Experimental results on the SCARED dataset show that our method achieves state-of-the-art performance in self-supervised depth estimation. Additionally, evaluations on the Endo-SLAM and SERV-CT datasets demonstrate strong generalization across diverse endoscopic environments.
Feature Point Extraction for Extra-Affine Image
Mar 05, 2025The issue concerning the significant decline in the stability of feature extraction for images subjected to large-angle affine transformations, where the angle exceeds 50 degrees, still awaits a satisfactory solution. Even ASIFT, which is built upon SIFT and entails a considerable number of image comparisons simulated by affine transformations, inevitably exhibits the drawbacks of being time-consuming and imposing high demands on memory usage. And the stability of feature extraction drops rapidly under large-view affine transformations. Consequently, we propose a method that represents an improvement over ASIFT. On the premise of improving the precision and maintaining the affine invariance, it currently ranks as the fastest feature extraction method for extra-affine images that we know of at present. Simultaneously, the stability of feature extraction regarding affine transformation images has been approximated to the maximum limits. Both the angle between the shooting direction and the normal direction of the photographed object (absolute tilt angle), and the shooting transformation angle between two images (transition tilt angle) are close to 90 degrees. The central idea of the method lies in obtaining the optimal parameter set by simulating affine transformation with the reference image. And the simulated affine transformation is reproduced by combining it with the Lanczos interpolation based on the optimal parameter set. Subsequently, it is combined with ORB, which exhibits excellent real-time performance for rapid orientation binary description. Moreover, a scale parameter simulation is introduced to further augment the operational efficiency.
MDeRainNet: An Efficient Neural Network for Rain Streak Removal from Macro-pixel Images
Jun 15, 2024



Since rainy weather always degrades image quality and poses significant challenges to most computer vision-based intelligent systems, image de-raining has been a hot research topic. Fortunately, in a rainy light field (LF) image, background obscured by rain streaks in one sub-view may be visible in the other sub-views, and implicit depth information and recorded 4D structural information may benefit rain streak detection and removal. However, existing LF image rain removal methods either do not fully exploit the global correlations of 4D LF data or only utilize partial sub-views, resulting in sub-optimal rain removal performance and no-equally good quality for all de-rained sub-views. In this paper, we propose an efficient network, called MDeRainNet, for rain streak removal from LF images. The proposed network adopts a multi-scale encoder-decoder architecture, which directly works on Macro-pixel images (MPIs) to improve the rain removal performance. To fully model the global correlation between the spatial and the angular information, we propose an Extended Spatial-Angular Interaction (ESAI) module to merge them, in which a simple and effective Transformer-based Spatial-Angular Interaction Attention (SAIA) block is also proposed for modeling long-range geometric correlations and making full use of the angular information. Furthermore, to improve the generalization performance of our network on real-world rainy scenes, we propose a novel semi-supervised learning framework for our MDeRainNet, which utilizes multi-level KL loss to bridge the domain gap between features of synthetic and real-world rain streaks and introduces colored-residue image guided contrastive regularization to reconstruct rain-free images. Extensive experiments conducted on synthetic and real-world LFIs demonstrate that our method outperforms the state-of-the-art methods both quantitatively and qualitatively.
A Robust Error-Resistant View Selection Method for 3D Reconstruction
Feb 25, 2024



To address the issue of increased triangulation uncertainty caused by selecting views with small camera baselines in Structure from Motion (SFM) view selection, this paper proposes a robust error-resistant view selection method. The method utilizes a triangulation-based computation to obtain an error-resistant model, which is then used to construct an error-resistant matrix. The sorting results of each row in the error-resistant matrix determine the candidate view set for each view. By traversing the candidate view sets of all views and completing the missing views based on the error-resistant matrix, the integrity of 3D reconstruction is ensured. Experimental comparisons between this method and the exhaustive method with the highest accuracy in the COLMAP program are conducted in terms of average reprojection error and absolute trajectory error in the reconstruction results. The proposed method demonstrates an average reduction of 29.40% in reprojection error accuracy and 5.07% in absolute trajectory error on the TUM dataset and DTU dataset.
A Highlight Removal Method for Capsule Endoscopy Images
Feb 25, 2024The images captured by Wireless Capsule Endoscopy (WCE) always exhibit specular reflections, and removing highlights while preserving the color and texture in the region remains a challenge. To address this issue, this paper proposes a highlight removal method for capsule endoscopy images. Firstly, the confidence and feature terms of the highlight region's edges are computed, where confidence is obtained by the ratio of known pixels in the RGB space's R channel to the B channel within a window centered on the highlight region's edge pixel, and feature terms are acquired by multiplying the gradient vector of the highlight region's edge pixel with the iso-intensity line. Subsequently, the confidence and feature terms are assigned different weights and summed to obtain the priority of all highlight region's edge pixels, and the pixel with the highest priority is identified. Then, the variance of the highlight region's edge pixels is used to adjust the size of the sample block window, and the best-matching block is searched in the known region based on the RGB color similarity and distance between the sample block and the window centered on the pixel with the highest priority. Finally, the pixels in the best-matching block are copied to the highest priority highlight removal region to achieve the goal of removing the highlight region. Experimental results demonstrate that the proposed method effectively removes highlights from WCE images, with a lower coefficient of variation in the highlight removal region compared to the Crinimisi algorithm and DeepGin method. Additionally, the color and texture in the highlight removal region are similar to those in the surrounding areas, and the texture is continuous.
Region Feature Descriptor Adapted to High Affine Transformations
Feb 25, 2024To address the issue of feature descriptors being ineffective in representing grayscale feature information when images undergo high affine transformations, leading to a rapid decline in feature matching accuracy, this paper proposes a region feature descriptor based on simulating affine transformations using classification. The proposed method initially categorizes images with different affine degrees to simulate affine transformations and generate a new set of images. Subsequently, it calculates neighborhood information for feature points on this new image set. Finally, the descriptor is generated by combining the grayscale histogram of the maximum stable extremal region to which the feature point belongs and the normalized position relative to the grayscale centroid of the feature point's region. Experimental results, comparing feature matching metrics under affine transformation scenarios, demonstrate that the proposed descriptor exhibits higher precision and robustness compared to existing classical descriptors. Additionally, it shows robustness when integrated with other descriptors.
A Feature Matching Method Based on Multi-Level Refinement Strategy
Feb 25, 2024



Feature matching is a fundamental and crucial process in visual SLAM, and precision has always been a challenging issue in feature matching. In this paper, based on a multi-level fine matching strategy, we propose a new feature matching method called KTGP-ORB. This method utilizes the similarity of local appearance in the Hamming space generated by feature descriptors to establish initial correspondences. It combines the constraint of local image motion smoothness, uses the GMS algorithm to enhance the accuracy of initial matches, and finally employs the PROSAC algorithm to optimize matches, achieving precise matching based on global grayscale information in Euclidean space. Experimental results demonstrate that the KTGP-ORB method reduces the error by an average of 29.92% compared to the ORB algorithm in complex scenes with illumination variations and blur.
An Image Enhancement Method for Improving Small Intestinal Villi Clarity
Feb 25, 2024



This paper presents, for the first time, an image enhancement methodology designed to enhance the clarity of small intestinal villi in Wireless Capsule Endoscopy (WCE) images. This method first separates the low-frequency and high-frequency components of small intestinal villi images using guided filtering. Subsequently, an adaptive light gain factor is generated based on the low-frequency component, and an adaptive gradient gain factor is derived from the convolution results of the Laplacian operator in different regions of small intestinal villi images. The obtained light gain factor and gradient gain factor are then combined to enhance the high-frequency components. Finally, the enhanced high-frequency component is fused with the original image to achieve adaptive sharpening of the edges of WCE small intestinal villi images. The experiments affirm that, compared to established WCE image enhancement methods, our approach not only accentuates the edge details of WCE small intestine villi images but also skillfully suppresses noise amplification, thereby preventing the occurrence of edge overshooting.