 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Feature Matching Method Based on Multi-Level Refinement Strategy
Feb 25, 2024



Feature matching is a fundamental and crucial process in visual SLAM, and precision has always been a challenging issue in feature matching. In this paper, based on a multi-level fine matching strategy, we propose a new feature matching method called KTGP-ORB. This method utilizes the similarity of local appearance in the Hamming space generated by feature descriptors to establish initial correspondences. It combines the constraint of local image motion smoothness, uses the GMS algorithm to enhance the accuracy of initial matches, and finally employs the PROSAC algorithm to optimize matches, achieving precise matching based on global grayscale information in Euclidean space. Experimental results demonstrate that the KTGP-ORB method reduces the error by an average of 29.92% compared to the ORB algorithm in complex scenes with illumination variations and blur.
An Error-Matching Exclusion Method for Accelerating Visual SLAM
Feb 25, 2024



In Visual SLAM, achieving accurate feature matching consumes a significant amount of time, severely impacting the real-time performance of the system. This paper proposes an accelerated method for Visual SLAM by integrating GMS (Grid-based Motion Statistics) with RANSAC (Random Sample Consensus) for the removal of mismatched features. The approach first utilizes the GMS algorithm to estimate the quantity of matched pairs within the neighborhood and ranks the matches based on their confidence. Subsequently, the Random Sample Consensus (RANSAC) algorithm is employed to further eliminate mismatched features. To address the time-consuming issue of randomly selecting all matched pairs, this method transforms it into the problem of prioritizing sample selection from high-confidence matches. This enables the iterative solution of the optimal model. Experimental results demonstrate that the proposed method achieves a comparable accuracy to the original GMS-RANSAC while reducing the average runtime by 24.13% on the KITTI, TUM desk, and TUM doll datasets.
An Image Enhancement Method for Improving Small Intestinal Villi Clarity
Feb 25, 2024



This paper presents, for the first time, an image enhancement methodology designed to enhance the clarity of small intestinal villi in Wireless Capsule Endoscopy (WCE) images. This method first separates the low-frequency and high-frequency components of small intestinal villi images using guided filtering. Subsequently, an adaptive light gain factor is generated based on the low-frequency component, and an adaptive gradient gain factor is derived from the convolution results of the Laplacian operator in different regions of small intestinal villi images. The obtained light gain factor and gradient gain factor are then combined to enhance the high-frequency components. Finally, the enhanced high-frequency component is fused with the original image to achieve adaptive sharpening of the edges of WCE small intestinal villi images. The experiments affirm that, compared to established WCE image enhancement methods, our approach not only accentuates the edge details of WCE small intestine villi images but also skillfully suppresses noise amplification, thereby preventing the occurrence of edge overshooting.
A Robust Error-Resistant View Selection Method for 3D Reconstruction
Feb 25, 2024



To address the issue of increased triangulation uncertainty caused by selecting views with small camera baselines in Structure from Motion (SFM) view selection, this paper proposes a robust error-resistant view selection method. The method utilizes a triangulation-based computation to obtain an error-resistant model, which is then used to construct an error-resistant matrix. The sorting results of each row in the error-resistant matrix determine the candidate view set for each view. By traversing the candidate view sets of all views and completing the missing views based on the error-resistant matrix, the integrity of 3D reconstruction is ensured. Experimental comparisons between this method and the exhaustive method with the highest accuracy in the COLMAP program are conducted in terms of average reprojection error and absolute trajectory error in the reconstruction results. The proposed method demonstrates an average reduction of 29.40% in reprojection error accuracy and 5.07% in absolute trajectory error on the TUM dataset and DTU dataset.
A Highlight Removal Method for Capsule Endoscopy Images
Feb 25, 2024The images captured by Wireless Capsule Endoscopy (WCE) always exhibit specular reflections, and removing highlights while preserving the color and texture in the region remains a challenge. To address this issue, this paper proposes a highlight removal method for capsule endoscopy images. Firstly, the confidence and feature terms of the highlight region's edges are computed, where confidence is obtained by the ratio of known pixels in the RGB space's R channel to the B channel within a window centered on the highlight region's edge pixel, and feature terms are acquired by multiplying the gradient vector of the highlight region's edge pixel with the iso-intensity line. Subsequently, the confidence and feature terms are assigned different weights and summed to obtain the priority of all highlight region's edge pixels, and the pixel with the highest priority is identified. Then, the variance of the highlight region's edge pixels is used to adjust the size of the sample block window, and the best-matching block is searched in the known region based on the RGB color similarity and distance between the sample block and the window centered on the pixel with the highest priority. Finally, the pixels in the best-matching block are copied to the highest priority highlight removal region to achieve the goal of removing the highlight region. Experimental results demonstrate that the proposed method effectively removes highlights from WCE images, with a lower coefficient of variation in the highlight removal region compared to the Crinimisi algorithm and DeepGin method. Additionally, the color and texture in the highlight removal region are similar to those in the surrounding areas, and the texture is continuous.
Region Feature Descriptor Adapted to High Affine Transformations
Feb 25, 2024To address the issue of feature descriptors being ineffective in representing grayscale feature information when images undergo high affine transformations, leading to a rapid decline in feature matching accuracy, this paper proposes a region feature descriptor based on simulating affine transformations using classification. The proposed method initially categorizes images with different affine degrees to simulate affine transformations and generate a new set of images. Subsequently, it calculates neighborhood information for feature points on this new image set. Finally, the descriptor is generated by combining the grayscale histogram of the maximum stable extremal region to which the feature point belongs and the normalized position relative to the grayscale centroid of the feature point's region. Experimental results, comparing feature matching metrics under affine transformation scenarios, demonstrate that the proposed descriptor exhibits higher precision and robustness compared to existing classical descriptors. Additionally, it shows robustness when integrated with other descriptors.
Design, Modelling and Validation of a Novel Extra Slender Continuum Robot for In-situ Inspection and Repair in Aeroengine
Oct 09, 2019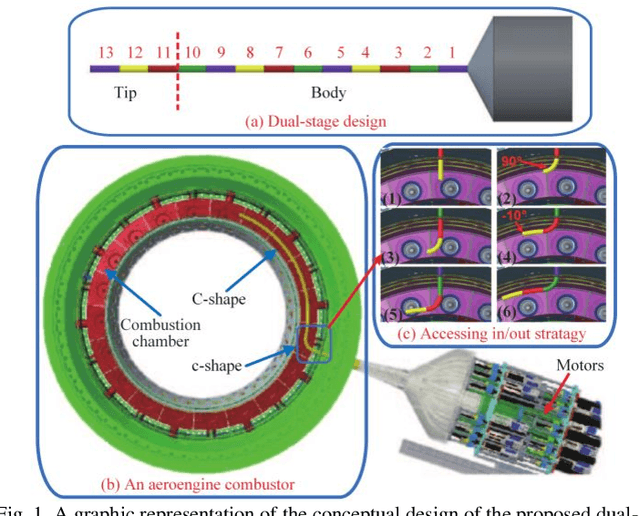
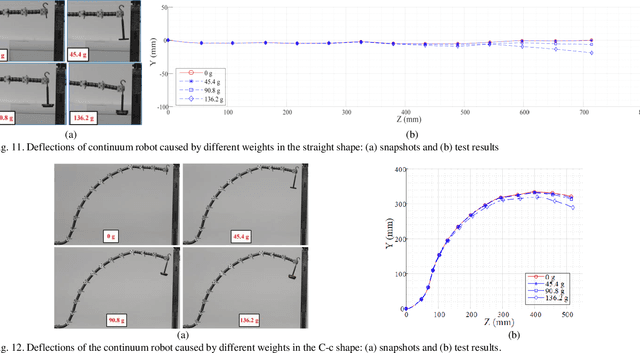
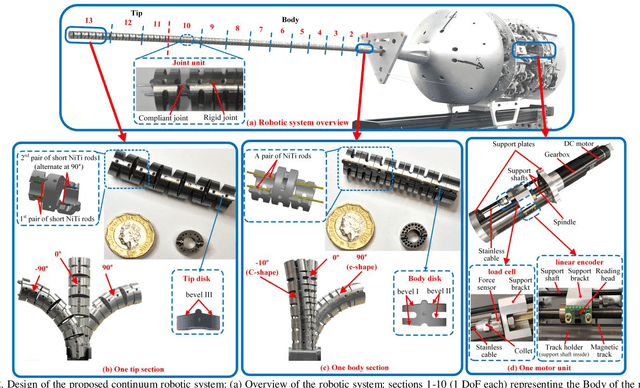
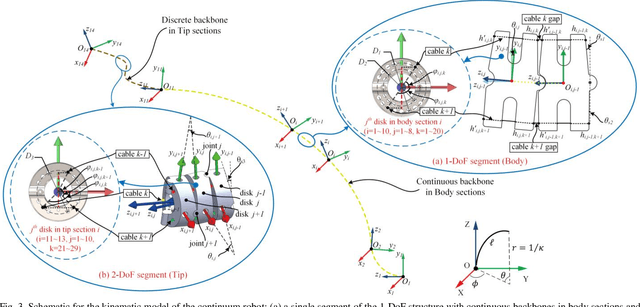
In-situ aeroengine maintenance works are highly beneficial as it can significantly reduce the current maintenance cycle which is extensive and costly due to the disassembly requirement of engines from aircrafts. However, navigating in/out via inspection ports and performing multi-axis movements with end-effectors in constrained environments (e.g. combustion chamber) are fairly challenging. A novel extra-slender (diameter-to-length ratio <0.02) dual-stage continuum robot (16 degree-of-freedom) is proposed to navigate in/out confined environments and perform required configuration shapes for further repair operations. Firstly, the robot design presents several innovative mechatronic solutions: (i) dual-stage tendon-driven structure with bevelled disks to perform required shapes and to provide selective stiffness for carrying high payloads; (ii) various rigid-compliant combined joints to enable different flexibility and stiffness in each stage; (iii) three commanding cables for each 2-DoF section to minimise the number of actuators with precise actuations. Secondly, a segment-scaled piecewise-constant-curvature-theory based kinematic model and a Kirchhoff-elastic-rod-theory based static model are established by considering the applied forces/moments (friction, actuation, gravity and external load), where the friction coefficient is modelled as a function of bending angle. Finally, experiments were carried out to validate the proposed static modelling and to evaluate the robot capabilities of performing the predefined shape and stiffness.