 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-stable thin soft robot for in-plane locomotion in narrow space
Sep 30, 2024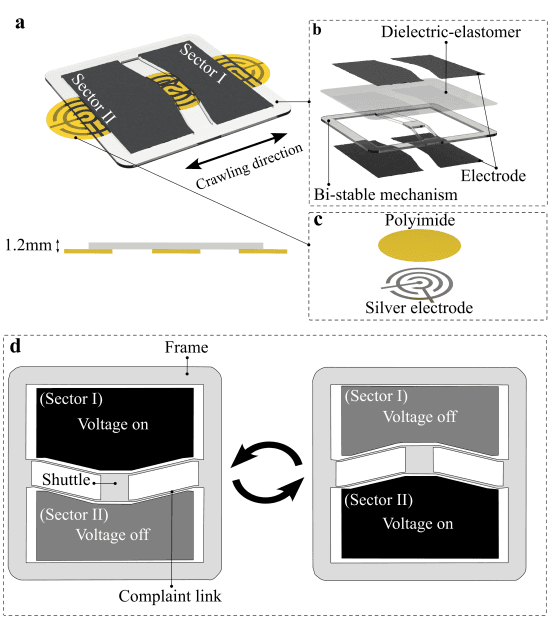
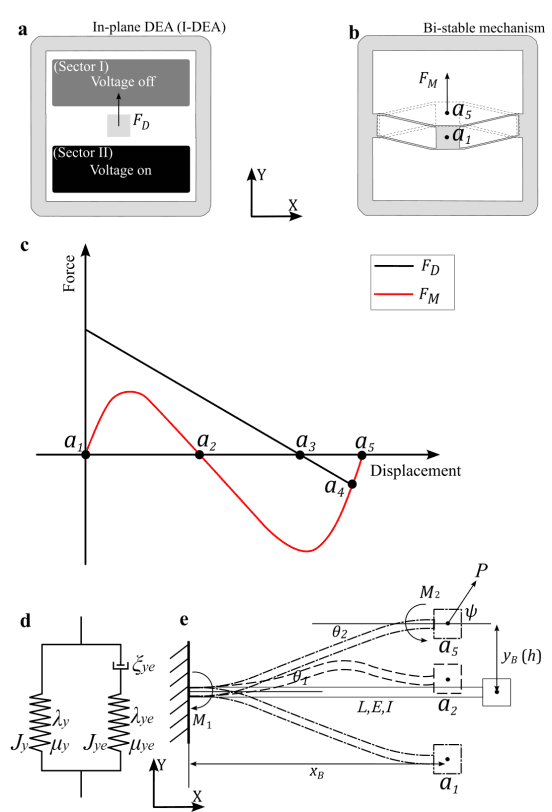
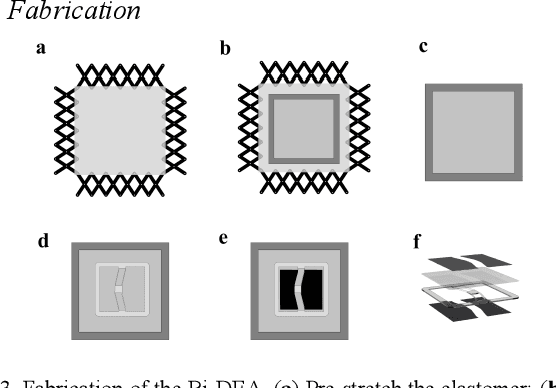
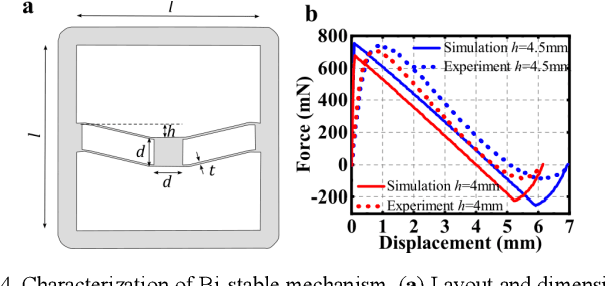
Dielectric elastomer actuators (DEAs), also recognized as artificial muscle, have been widely developed for the soft locomotion robot. With the complaint skeleton and miniaturized dimension, they are well suited for the narrow space inspection. In this work, we propose a novel low profile (1.1mm) and lightweight (1.8g) bi-stable in-plane DEA (Bi-DEA) constructed by supporting a dielectric elastomer onto a flat bi-stable mechanism. It has an amplified displacement and output force compared with the in-plane DEA (I-DEA) without the bi-stable mechanism. Then, the Bi-DEA is applied to a thin soft robot, using three electrostatic adhesive pads (EA-Pads) as anchoring elements. This robot is capable of crawling and climbing to access millimetre-scale narrow gaps. A theoretical model of the bi-stable mechanism and the DEA are presented. The enhanced performance of the Bi-DEA induced by the mechanism is experimentally validated. EA-Pad provides the adhesion between the actuator and the locomotion substrate, allowing crawling and climbing on various surfaces, i.e., paper and acrylic. The thin soft robot has been demonstrated to be capable of crawling through a 4mm narrow gap with a speed up to 3.3mm/s (0.07 body length per second and 2.78 body thickness per second).
Design, manufacturing, and inverse dynamic modeling of soft parallel robots actuated by dielectric elastomer actuators
Sep 30, 2024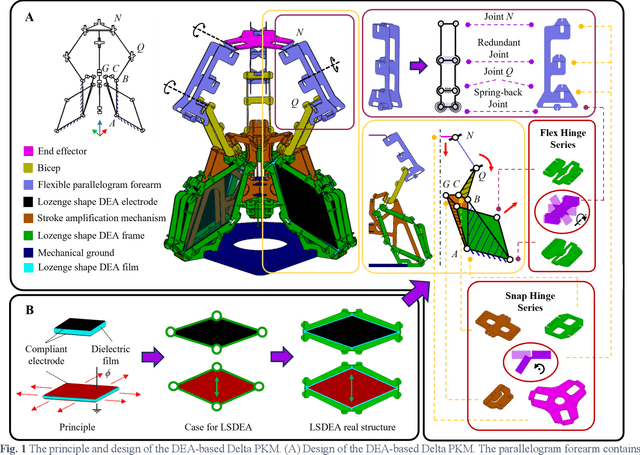
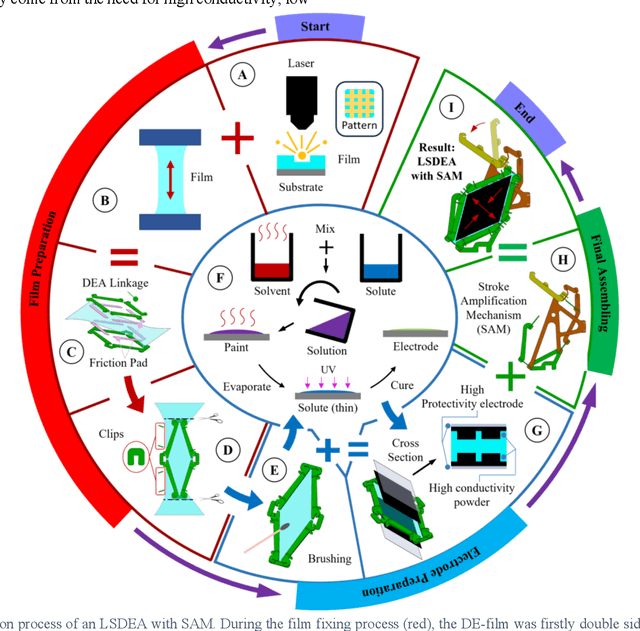
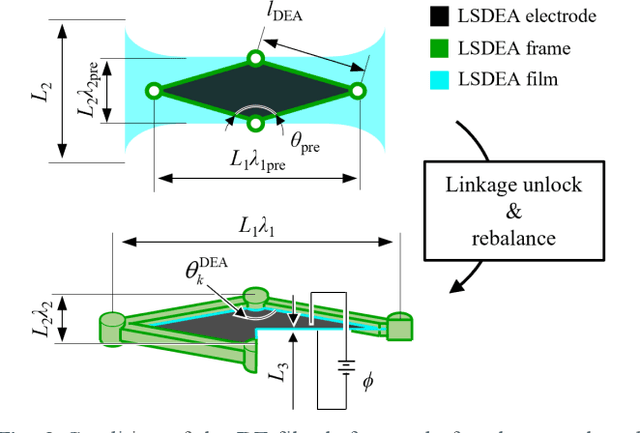
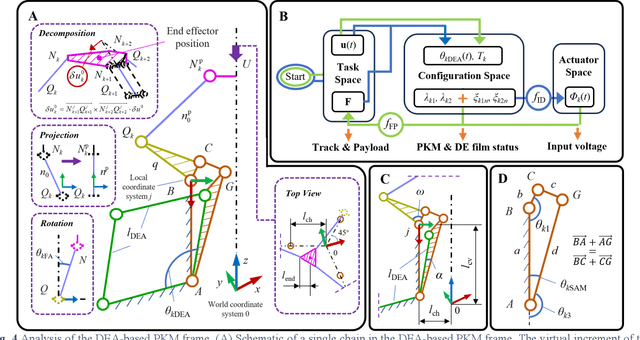
Soft parallel robots with their manipulation safety and low commercial cost show a promising future for delicate operations and safe human-robot interactions. However, promoting the use of electroactive polymers (EAPs) is still challenging due to the under-improving quality of the product and the dynamic modelling of the collaborations between multiple actuators. This article presents the design, fabrication, modelling and control of a parallel kinematics Delta robot actuated by dielectric elastomer actuators (DEAs). The trade-off between the actuation force and stroke is retaken by an angular stroke amplification mechanism, and the weight of the robot frame is reduced by utilizing 3D puzzling strip structures. A generic way of constructing a high-stability conductive paint on a silicon-based film has been achieved by laser scanning the DE-film and then sandwiching a conductive particle-based electrode with a paint which is mixed by the particles and photosensitive resin. Compared to the wildly used carbon grease, the fabricated electrode shows a higher consistency in its dynamic behaviour before and after the on-stand test. Finally, to predict the output force and inverse motion of the robot end effector, we constructed the inverse dynamic model by introducing an expanded Bergstrom-Boyce model to the constitutive behavior of the dielectric film. The experimental results show a prediction of robot output force with RSME of 12.4% when the end effector remains stationary, and a well-followed trajectory with less than RSME 2.5%.
Design, Modelling and Validation of a Novel Extra Slender Continuum Robot for In-situ Inspection and Repair in Aeroengine
Oct 09, 2019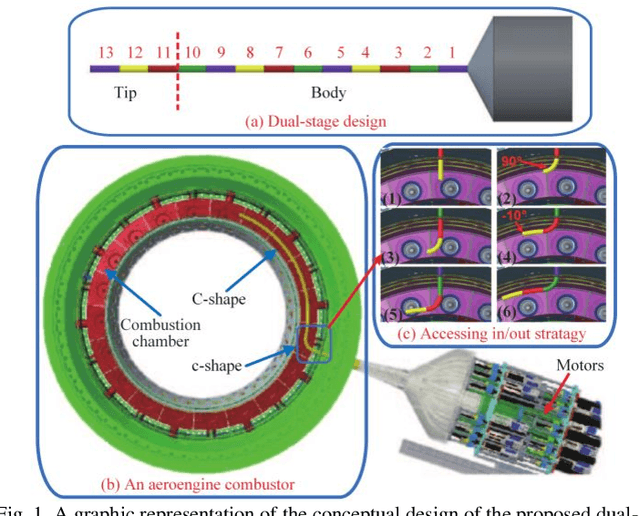
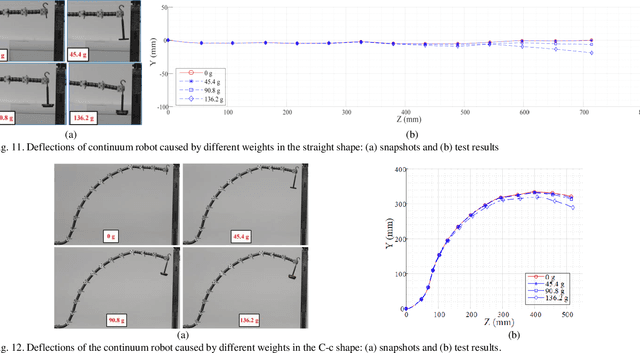
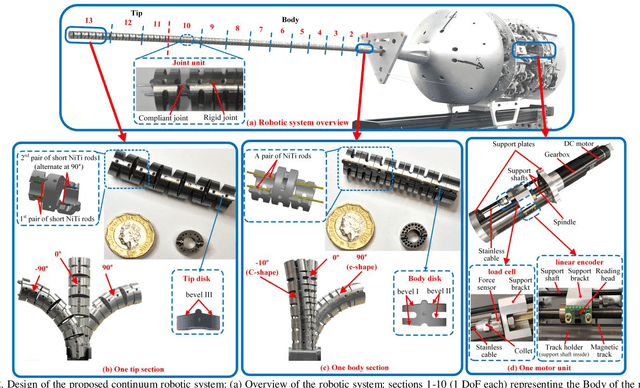
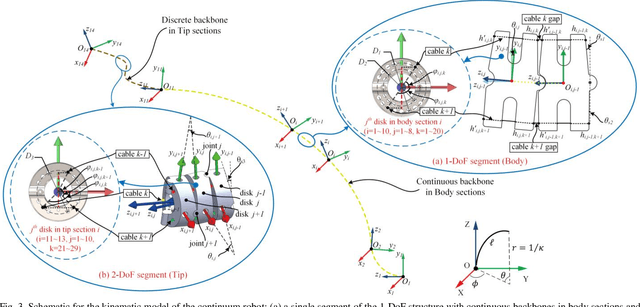
In-situ aeroengine maintenance works are highly beneficial as it can significantly reduce the current maintenance cycle which is extensive and costly due to the disassembly requirement of engines from aircrafts. However, navigating in/out via inspection ports and performing multi-axis movements with end-effectors in constrained environments (e.g. combustion chamber) are fairly challenging. A novel extra-slender (diameter-to-length ratio <0.02) dual-stage continuum robot (16 degree-of-freedom) is proposed to navigate in/out confined environments and perform required configuration shapes for further repair operations. Firstly, the robot design presents several innovative mechatronic solutions: (i) dual-stage tendon-driven structure with bevelled disks to perform required shapes and to provide selective stiffness for carrying high payloads; (ii) various rigid-compliant combined joints to enable different flexibility and stiffness in each stage; (iii) three commanding cables for each 2-DoF section to minimise the number of actuators with precise actuations. Secondly, a segment-scaled piecewise-constant-curvature-theory based kinematic model and a Kirchhoff-elastic-rod-theory based static model are established by considering the applied forces/moments (friction, actuation, gravity and external load), where the friction coefficient is modelled as a function of bending angle. Finally, experiments were carried out to validate the proposed static modelling and to evaluate the robot capabilities of performing the predefined shape and stiffness.