 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-stable thin soft robot for in-plane locomotion in narrow space
Sep 30, 2024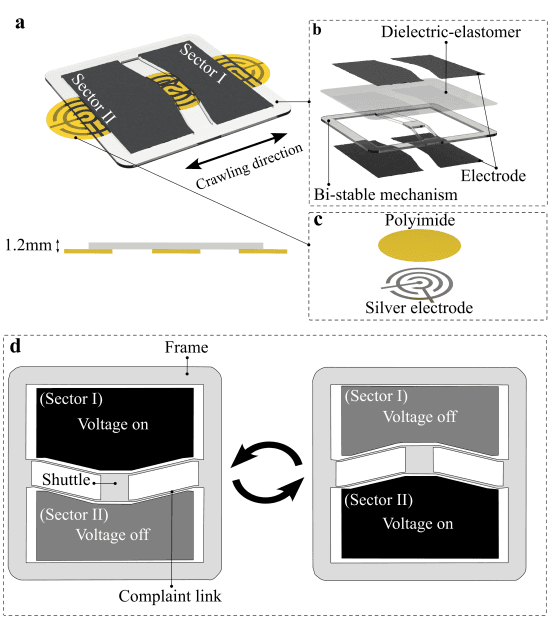
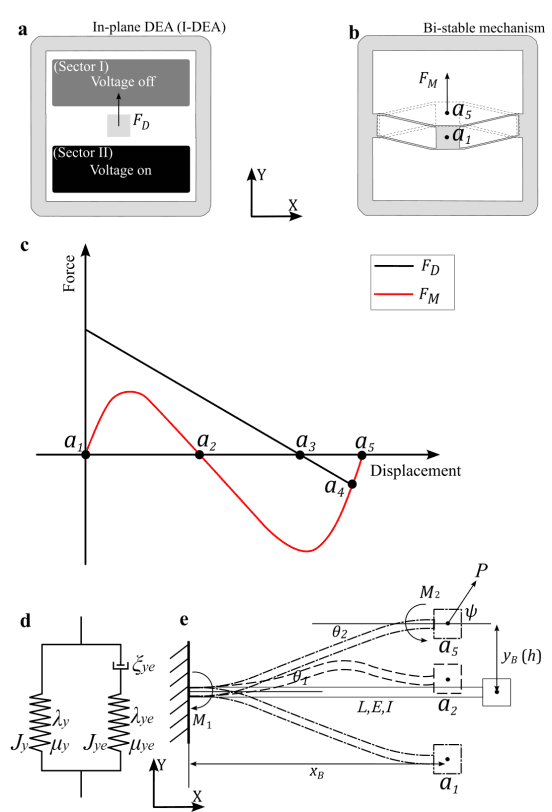
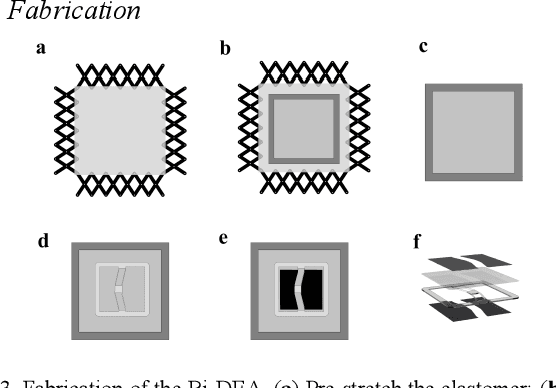
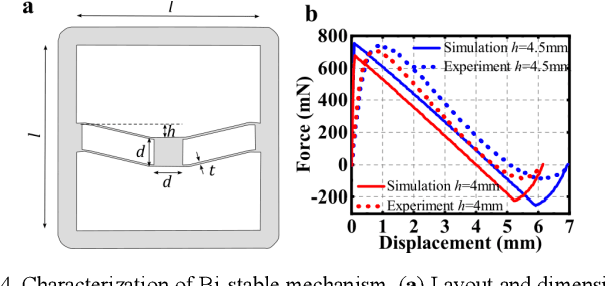
Dielectric elastomer actuators (DEAs), also recognized as artificial muscle, have been widely developed for the soft locomotion robot. With the complaint skeleton and miniaturized dimension, they are well suited for the narrow space inspection. In this work, we propose a novel low profile (1.1mm) and lightweight (1.8g) bi-stable in-plane DEA (Bi-DEA) constructed by supporting a dielectric elastomer onto a flat bi-stable mechanism. It has an amplified displacement and output force compared with the in-plane DEA (I-DEA) without the bi-stable mechanism. Then, the Bi-DEA is applied to a thin soft robot, using three electrostatic adhesive pads (EA-Pads) as anchoring elements. This robot is capable of crawling and climbing to access millimetre-scale narrow gaps. A theoretical model of the bi-stable mechanism and the DEA are presented. The enhanced performance of the Bi-DEA induced by the mechanism is experimentally validated. EA-Pad provides the adhesion between the actuator and the locomotion substrate, allowing crawling and climbing on various surfaces, i.e., paper and acrylic. The thin soft robot has been demonstrated to be capable of crawling through a 4mm narrow gap with a speed up to 3.3mm/s (0.07 body length per second and 2.78 body thickness per second).