 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUntethered thin dielectric elastomer actuated soft robot
Dec 12, 2025Thin dielectric elastomer actuator (DEA) features a unique in-plane configuration, enabling low-profile designs capable of accessing millimetre-scale narrow spaces. However, most existing DEA-powered soft robots require high voltages and wired power connections, limiting their ability to operate in confined environments. This study presents an untethered thin soft robot (UTS-Robot) powered by thin dielectric elastomer actuators (TS-DEA). The robot measures 38 mm in length, 6 mm in height, and weighs just 2.34 grams, integrating flexible onboard electronics to achieve fully untethered actuation. The TS-DEA, operating at resonant frequencies of 86 Hz under a low driving voltage of 220 V, adopts a dual-actuation sandwiched structure, comprising four dielectric elastomer layers bonded to a compressible tensioning mechanism at its core. This design enables high power density actuation and locomotion via three directional friction pads. The low-voltage actuation is achieved by fabricating each elastomer layer via spin coating to an initial thickness of 50 um, followed by biaxial stretching to 8 um. A comprehensive design and modelling framework has been developed to optimise TS-DEA performance. Experimental evaluations demonstrate that the bare TS-DEA achieves a locomotion speed of 12.36 mm/s at resonance, the untethered configuration achieves a locomotion speed of 0.5 mm/s, making it highly suitable for navigating confined and complex environments.
Development and Experimental Evaluation of a Vibration-Based Adhesion System for Miniature Wall-Climbing Robots
Apr 06, 2025


In recent years, miniature wall-climbing robots have attracted widespread attention due to their significant potential in equipment inspection and in-situ repair applications. Traditional wall-climbing systems typically rely on electromagnetic, electrostatic, vacuum suction, or van der Waals forces for controllable adhesion. However, these conventional methods impose limitations when striving for both a compact design and high-speed mobility. This paper proposes a novel Vibration-Based Adhesion (VBA) technique, which utilizes a flexible disk vibrating near a surface to generate a strong and controllable attractive force without direct contact. By employing an electric motor as the vibration source, the constructed VBA system was experimentally evaluated, achieving an adhesion-to-weight ratio exceeding 51 times. The experimental results demonstrate that this adhesion mechanism not only provides a high normal force but also maintains minimal shear force, making it particularly suitable for high-speed movement and heavy load applications in miniature wall-climbing robots.
Design, manufacturing, and inverse dynamic modeling of soft parallel robots actuated by dielectric elastomer actuators
Sep 30, 2024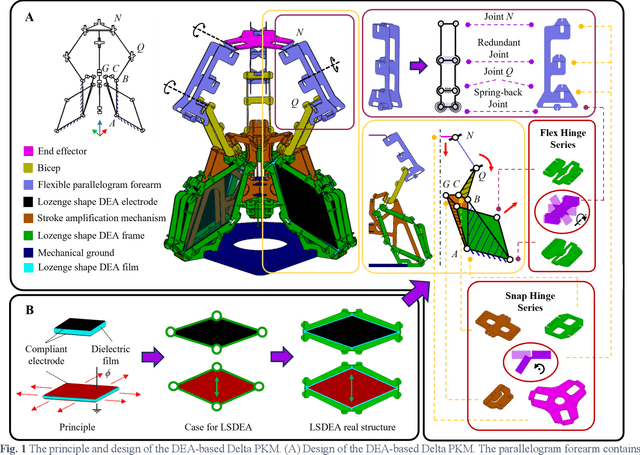
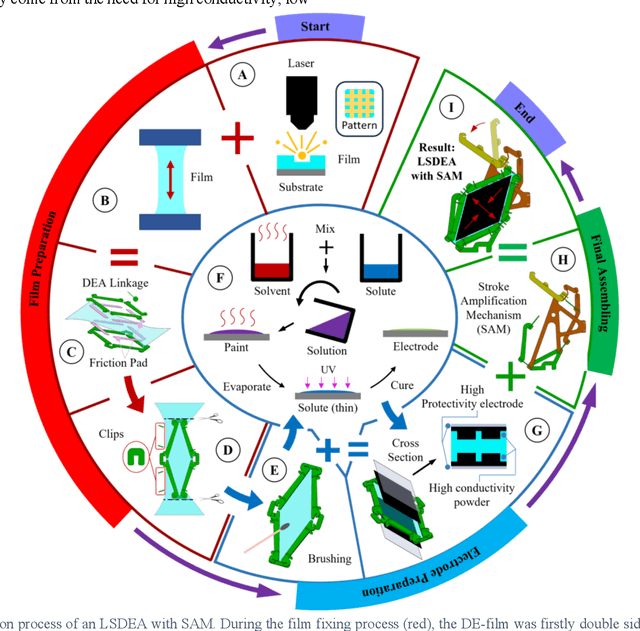
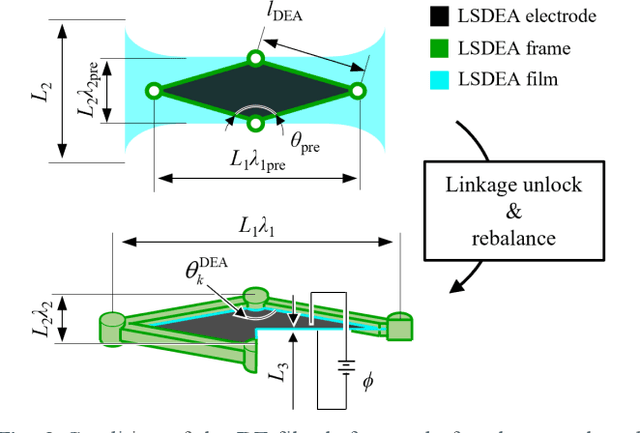
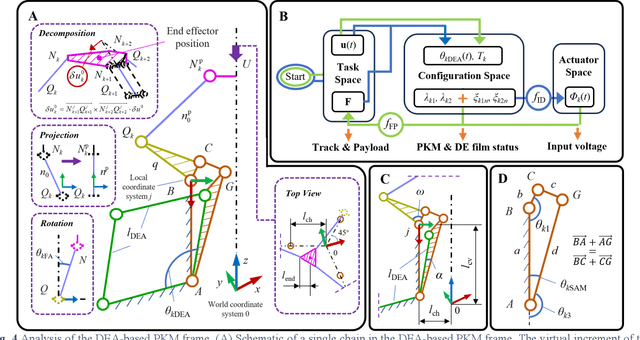
Soft parallel robots with their manipulation safety and low commercial cost show a promising future for delicate operations and safe human-robot interactions. However, promoting the use of electroactive polymers (EAPs) is still challenging due to the under-improving quality of the product and the dynamic modelling of the collaborations between multiple actuators. This article presents the design, fabrication, modelling and control of a parallel kinematics Delta robot actuated by dielectric elastomer actuators (DEAs). The trade-off between the actuation force and stroke is retaken by an angular stroke amplification mechanism, and the weight of the robot frame is reduced by utilizing 3D puzzling strip structures. A generic way of constructing a high-stability conductive paint on a silicon-based film has been achieved by laser scanning the DE-film and then sandwiching a conductive particle-based electrode with a paint which is mixed by the particles and photosensitive resin. Compared to the wildly used carbon grease, the fabricated electrode shows a higher consistency in its dynamic behaviour before and after the on-stand test. Finally, to predict the output force and inverse motion of the robot end effector, we constructed the inverse dynamic model by introducing an expanded Bergstrom-Boyce model to the constitutive behavior of the dielectric film. The experimental results show a prediction of robot output force with RSME of 12.4% when the end effector remains stationary, and a well-followed trajectory with less than RSME 2.5%.