 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinodynamic Model Predictive Control for Energy Efficient Locomotion of Legged Robots with Parallel Elasticity
Mar 07, 2025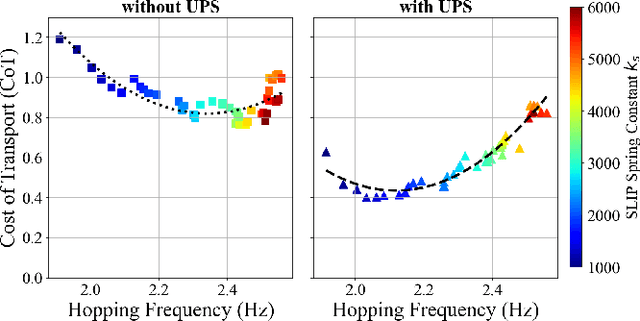
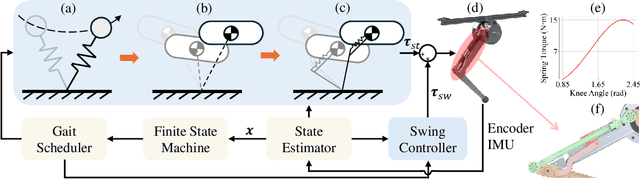
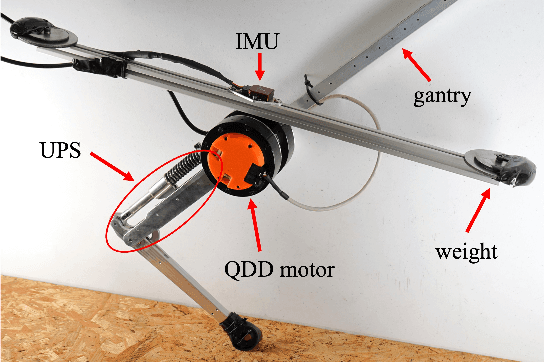
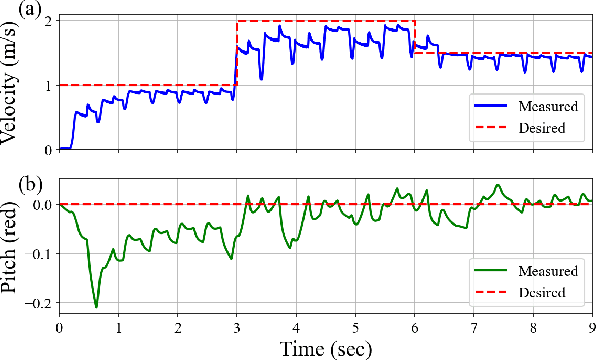
In this paper, we introduce a kinodynamic model predictive control (MPC) framework that exploits unidirectional parallel springs (UPS) to improve the energy efficiency of dynamic legged robots. The proposed method employs a hierarchical control structure, where the solution of MPC with simplified dynamic models is used to warm-start the kinodynamic MPC, which accounts for nonlinear centroidal dynamics and kinematic constraints. The proposed approach enables energy efficient dynamic hopping on legged robots by using UPS to reduce peak motor torques and energy consumption during stance phases. Simulation results demonstrated a 38.8% reduction in the cost of transport (CoT) for a monoped robot equipped with UPS during high-speed hopping. Additionally, preliminary hardware experiments show a 14.8% reduction in energy consumption. Video: https://youtu.be/AF11qMXJD48
Humanoid Self-Collision Avoidance Using Whole-Body Control with Control Barrier Functions
Jul 01, 2022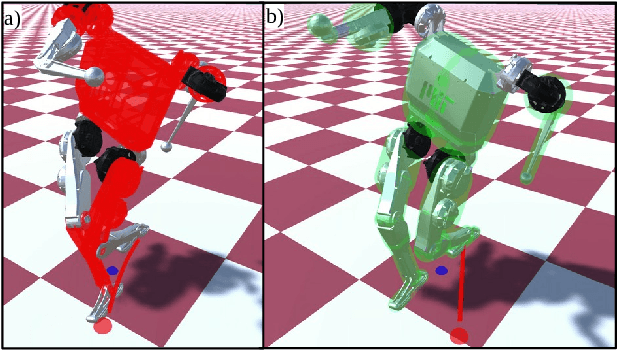
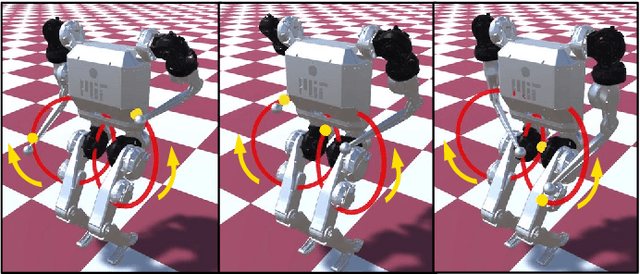
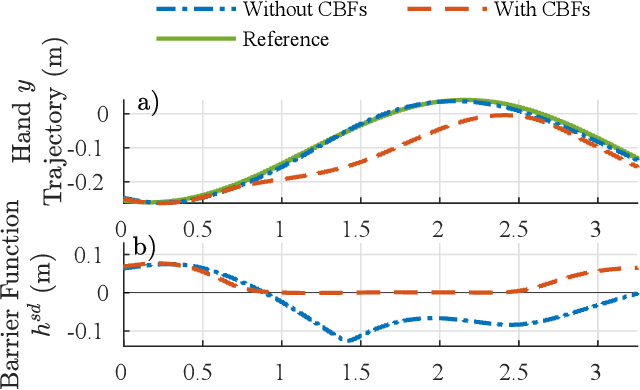
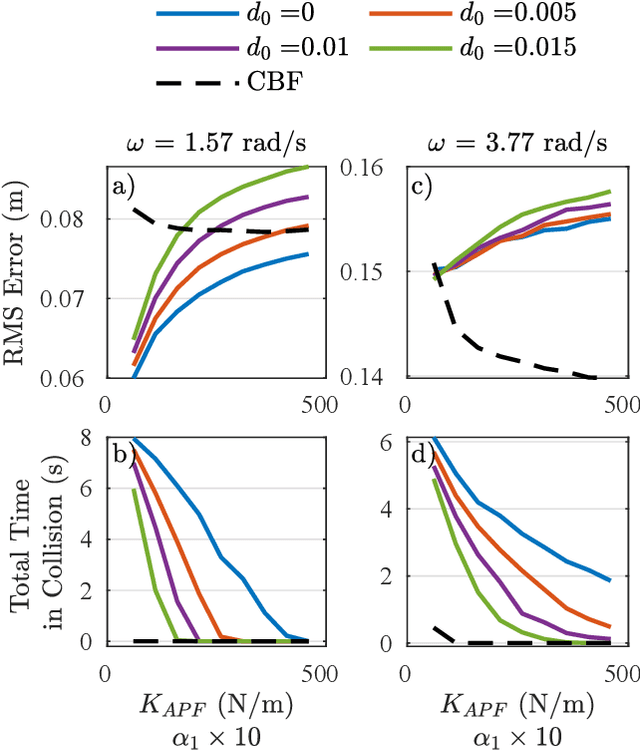
This work combines control barrier functions (CBFs) with a whole-body controller to enable self-collision avoidance for the MIT Humanoid. Existing reactive controllers for self-collision avoidance cannot guarantee collision-free trajectories as they do not leverage the robot's full dynamics, thus compromising kinematic feasibility. In comparison, the proposed CBF-WBC controller can reason about the robot's underactuated dynamics in real-time to guarantee collision-free motions. The effectiveness of this approach is validated in simulation. First, a simple hand-reaching experiment shows that the CBF-WBC enables the robot's hand to deviate from an infeasible reference trajectory to avoid self-collisions. Second, the CBF-WBC is combined with a linear model predictive controller (LMPC) designed for dynamic locomotion, and the CBF-WBC is used to track the LMPC predictions. A centroidal angular momentum task is also used to generate arm motions that assist humanoid locomotion and disturbance recovery. Walking experiments show that CBFs allow the centroidal angular momentum task to generate feasible arm motions and avoid leg self-collisions when the footstep location or swing trajectory provided by the high-level planner are infeasible for the real robot.
Dynamic Walking with Footstep Adaptation on the MIT Humanoid via Linear Model Predictive Control
Jun 08, 2022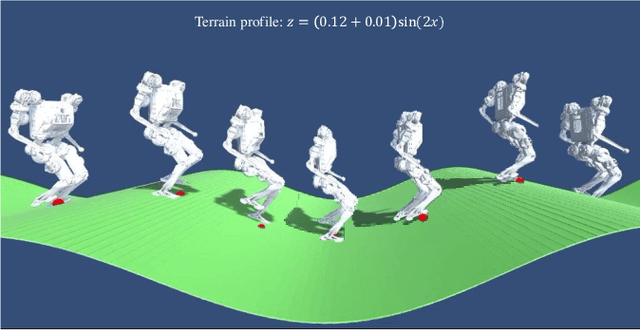
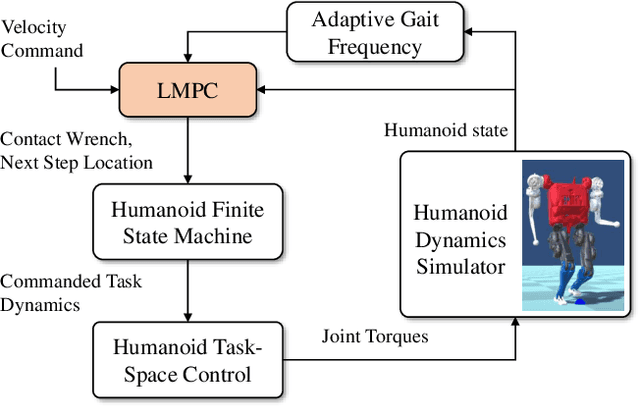
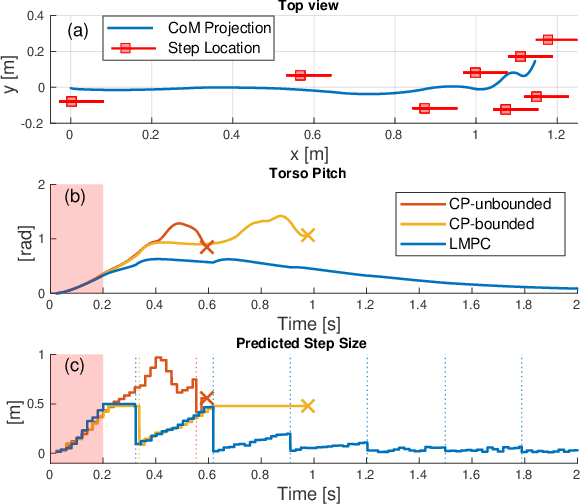
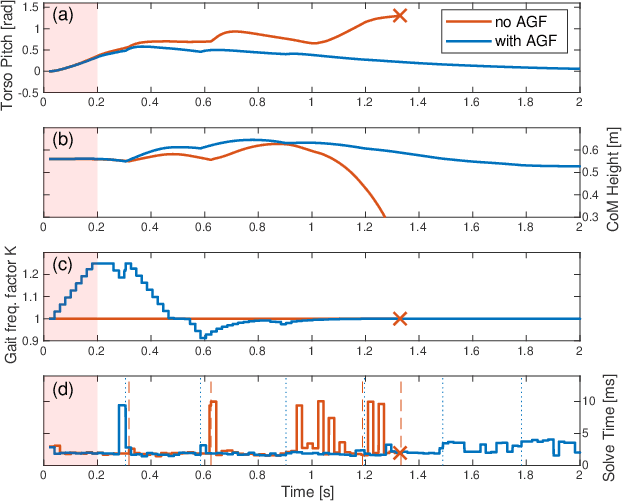
This paper proposes a model predictive control (MPC) framework for realizing dynamic walking gaits on the MIT Humanoid. In addition to adapting footstep location and timing online, the proposed method can reason about varying height, contact wrench, torso rotation, kinematic limit and negotiating uneven terrains. Specifically, a linear MPC (LMPC) optimizes for the desired footstep location by linearizing the single rigid body dynamics with respect to the current footstep location. A low-level task-space controller tracks the predicted state and control trajectories from the LMPC to leverage the full-body dynamics. Finally, an adaptive gait frequency scheme is employed to modify the step frequency and enhance the robustness of the walking controller. Both LMPC and task-space control can be efficiently solved as quadratic programs (QP), and thus amenable for real-time applications. Simulation studies where the MIT Humanoid traverses a wave field and recovers from impulsive disturbances validated the proposed approach.
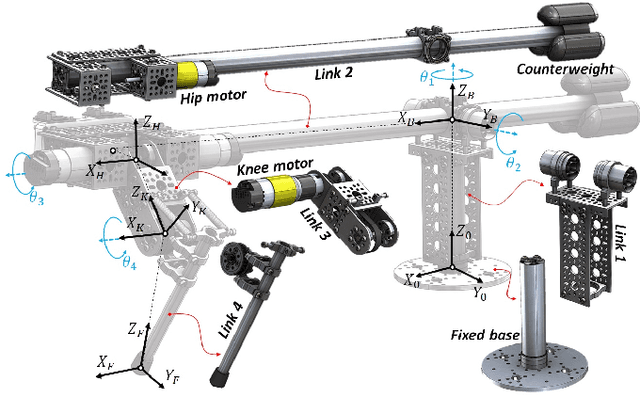
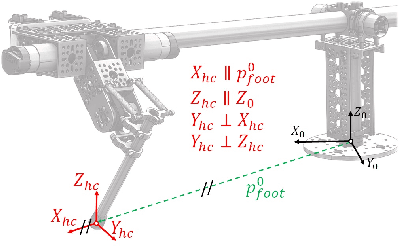
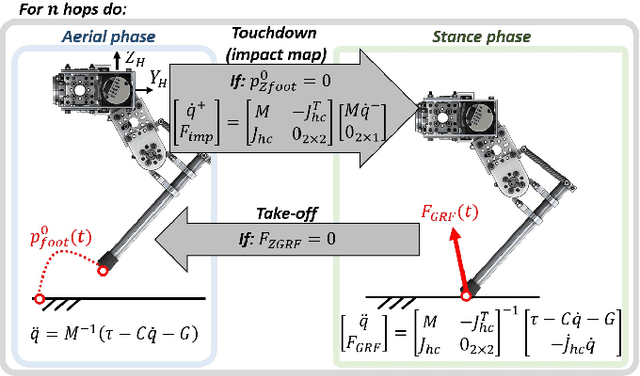
HOPPY: An Open-source Kit for Education with Dynamic Legged Robots
Mar 15, 2021
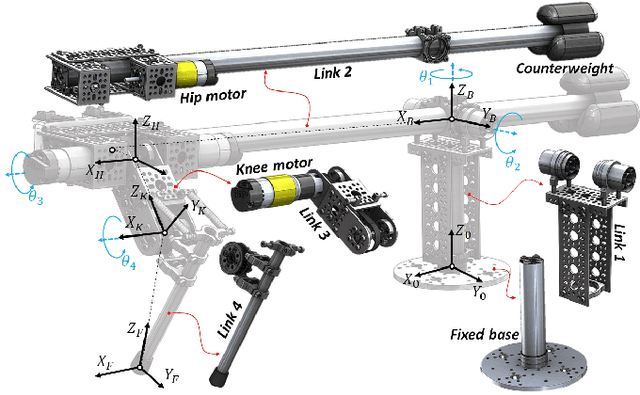
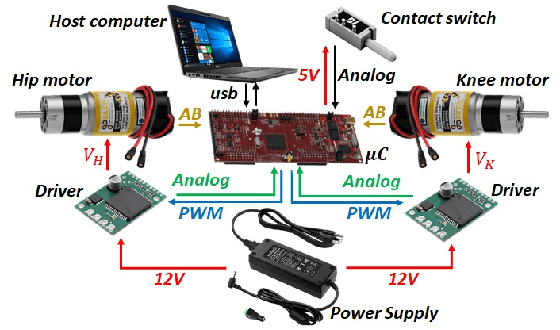
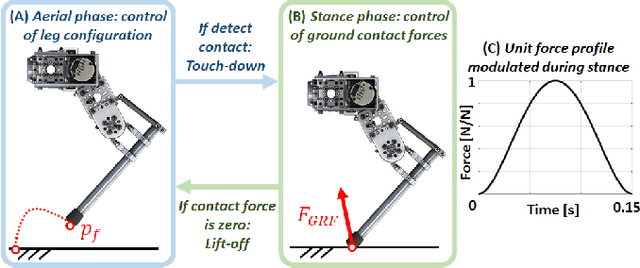
This paper introduces HOPPY, an open-source, low-cost, robust, and modular kit for robotics education. The robot dynamically hops around a rotating gantry with a fixed base. The kit is intended to lower the entry barrier for studying dynamic robots and legged locomotion with real systems. It bridges the theoretical content of fundamental robotic courses with real dynamic robots by facilitating and guiding the software and hardware integration. This paper describes the topics which can be studied using the kit, lists its components, discusses preferred practices for implementation, presents results from experiments with the simulator and the real system, and suggests further improvements. A simple heuristic-based controller is described to achieve velocities up to 1.7m/s, navigate small objects, and mitigate external disturbances when the robot is aided by a counterweight. HOPPY was utilized as the subject of a semester-long project for the Robot Dynamics and Control course at the University of Illinois at Urbana-Champaign. The positive feedback from the students and instructors about the hands-on activities during the course motivates us to share this kit and continue improving in the future.
Representation-Free Model Predictive Control for Dynamic Motions in Quadrupeds
Dec 18, 2020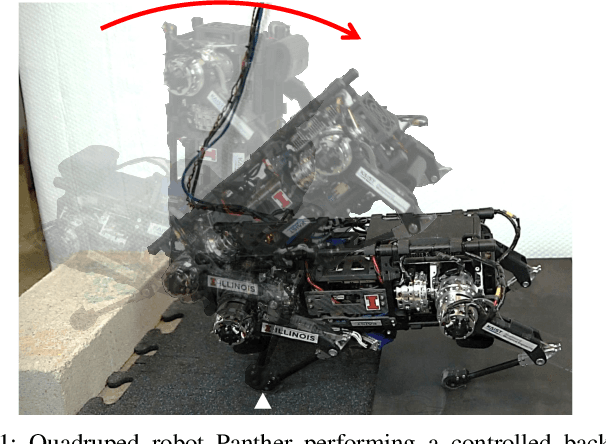
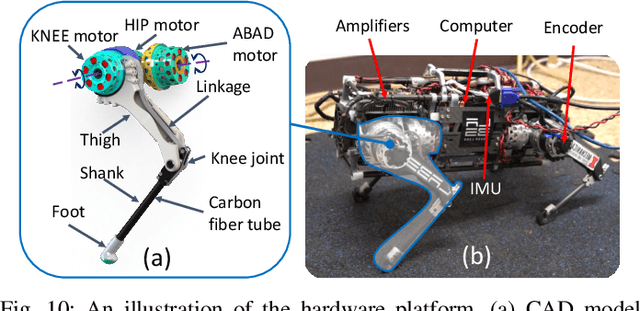
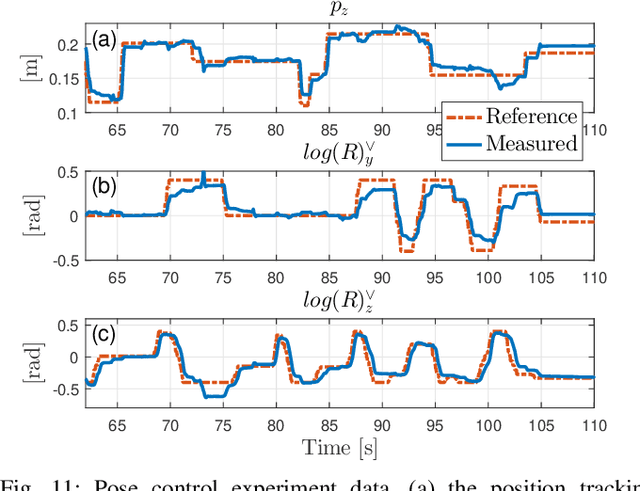
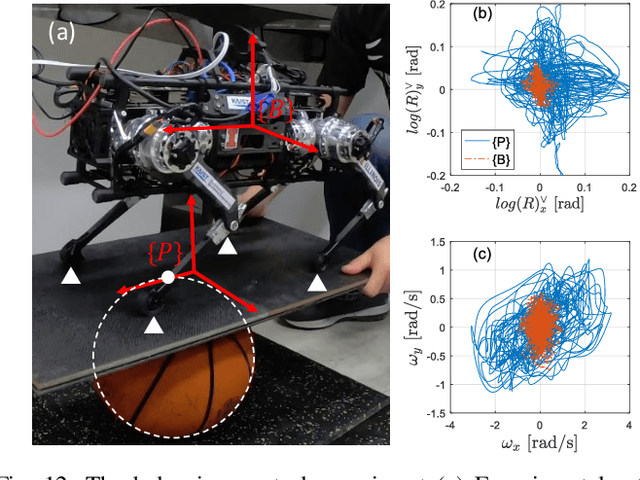
This paper presents a novel Representation-Free Model Predictive Control (RF-MPC) framework for controlling various dynamic motions of a quadrupedal robot in three dimensional (3D) space. Our formulation directly represents the rotational dynamics using the rotation matrix, which liberates us from the issues associated with the use of Euler angles and quaternion as the orientation representations. With a variation-based linearization scheme and a carefully constructed cost function, the MPC control law is transcribed to the standard Quadratic Program (QP) form. The MPC controller can operate at real-time rates of 250 Hz on a quadruped robot. Experimental results including periodic quadrupedal gaits and a controlled backflip validate that our control strategy could stabilize dynamic motions that involve singularity in 3D maneuvers.
Kinodynamic Motion Planning for Multi-Legged Robot Jumping via Mixed-Integer Convex Program
Nov 03, 2020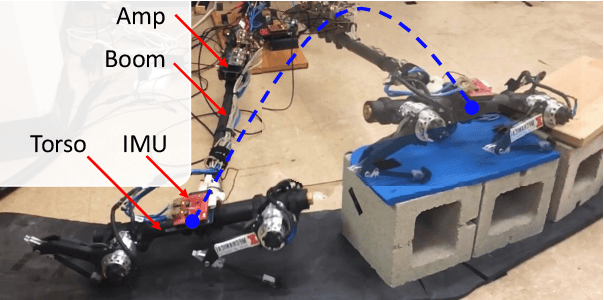
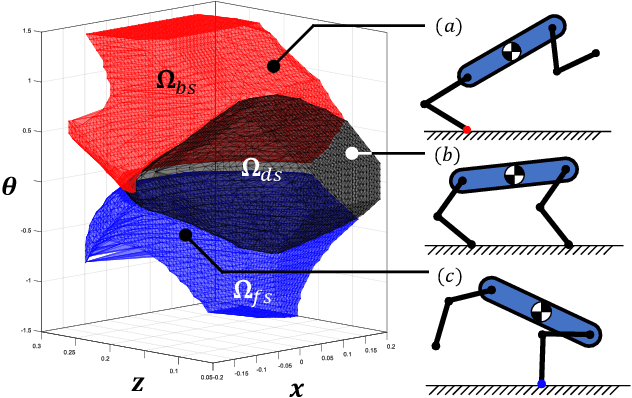
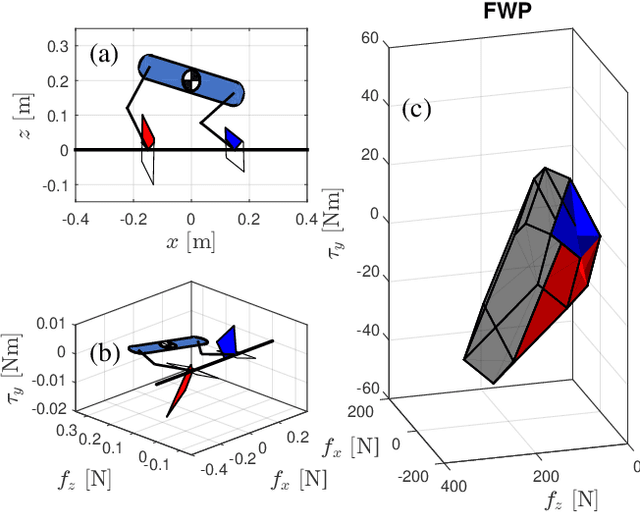
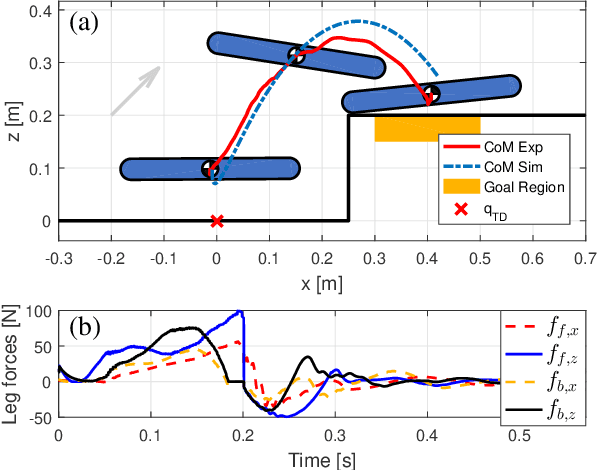
This paper proposes a kinodynamic motion planning framework for multi-legged robot jumping based on the mixed-integer convex program (MICP), which simultaneously reasons about centroidal motion, contact points, wrench, and gait sequences. This method uniquely combines configuration space discretization and the construction of feasible wrench polytope (FWP) to encode kinematic constraints, actuator limit, friction cone constraint, and gait sequencing into a single MICP. The MICP could be efficiently solved to the global optimum by off-the-shelf numerical solvers and provide highly dynamic jumping motions without requiring initial guesses. Simulation and experimental results demonstrate that the proposed method could find novel and dexterous maneuvers that are directly deployable on the two-legged robot platform to traverse through challenging terrains.
HOPPY: An open-source and low-cost kit for dynamic robotics education
Oct 27, 2020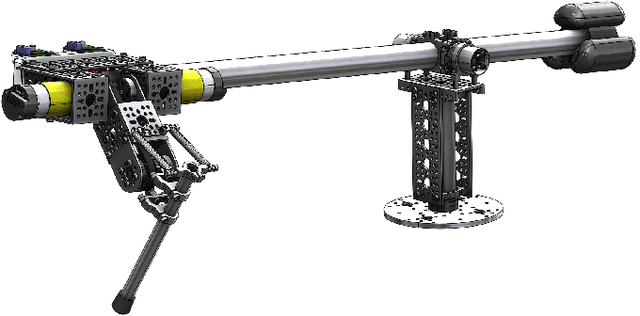
This letter introduces HOPPY, an open-source, low-cost, robust, and modular kit for robotics education. The robot dynamically hops around a rotating gantry with a fixed base. The kit lowers the entry barrier for studying dynamic robots and legged locomotion in real systems. The kit bridges the theoretical content of fundamental robotic courses and real dynamic robots by facilitating and guiding the software and hardware integration. This letter describes the topics which can be studied using the kit, lists its components, discusses best practices for implementation, presents results from experiments with the simulator and the real system, and suggests further improvements. A simple controller is described to achieve velocities up to 2m/s, navigate small objects, and mitigate external disturbances (kicks). HOPPY was utilized as the topic of a semester-long project for the Robot Dynamics and Control course at the University of Illinois at Urbana-Champaign. Students provided an overwhelmingly positive feedback from the hands-on activities during the course and the instructors will continue to improve the kit for upcoming semesters.