 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinodynamic Model Predictive Control for Energy Efficient Locomotion of Legged Robots with Parallel Elasticity
Paper and Code
Mar 07, 2025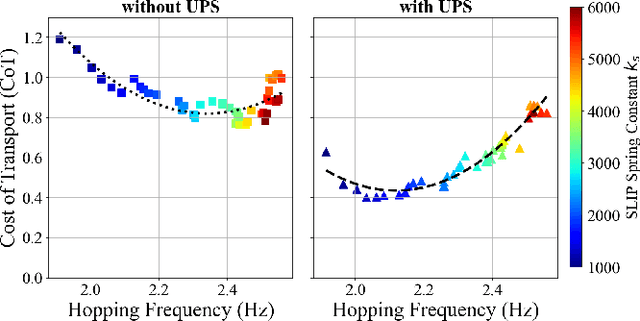
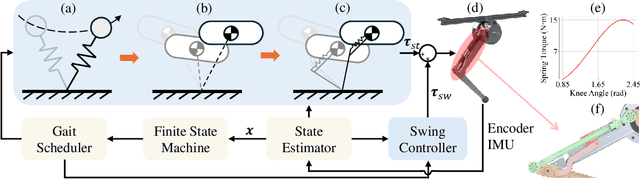
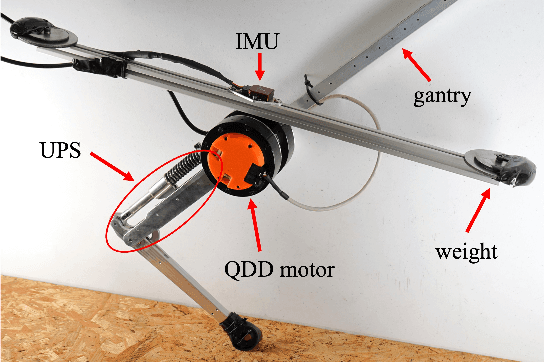
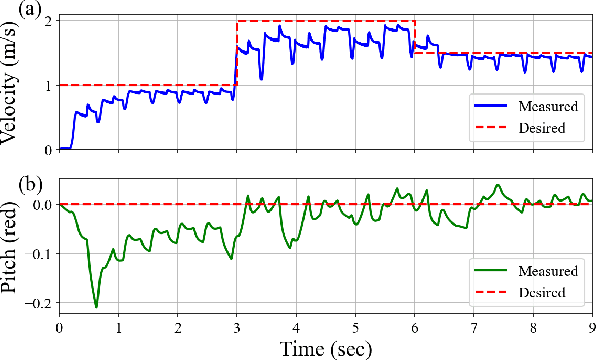
In this paper, we introduce a kinodynamic model predictive control (MPC) framework that exploits unidirectional parallel springs (UPS) to improve the energy efficiency of dynamic legged robots. The proposed method employs a hierarchical control structure, where the solution of MPC with simplified dynamic models is used to warm-start the kinodynamic MPC, which accounts for nonlinear centroidal dynamics and kinematic constraints. The proposed approach enables energy efficient dynamic hopping on legged robots by using UPS to reduce peak motor torques and energy consumption during stance phases. Simulation results demonstrated a 38.8% reduction in the cost of transport (CoT) for a monoped robot equipped with UPS during high-speed hopping. Additionally, preliminary hardware experiments show a 14.8% reduction in energy consumption. Video: https://youtu.be/AF11qMXJD48