 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinodynamic Model Predictive Control for Energy Efficient Locomotion of Legged Robots with Parallel Elasticity
Mar 07, 2025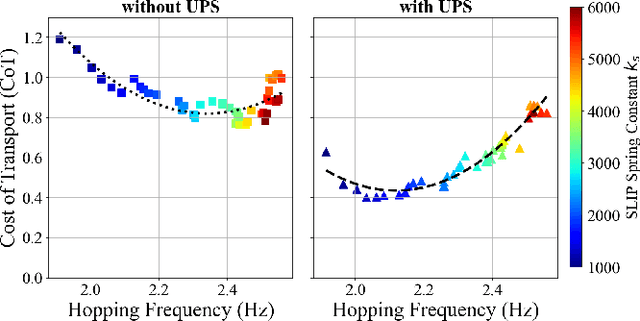
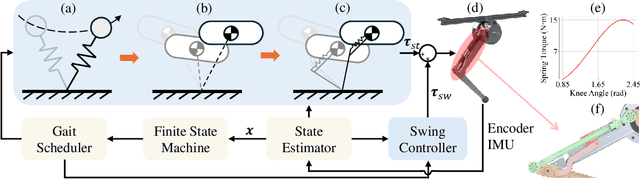
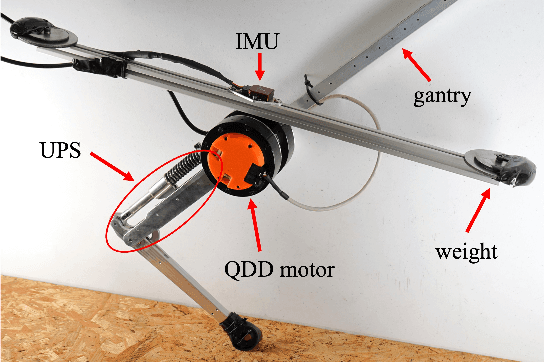
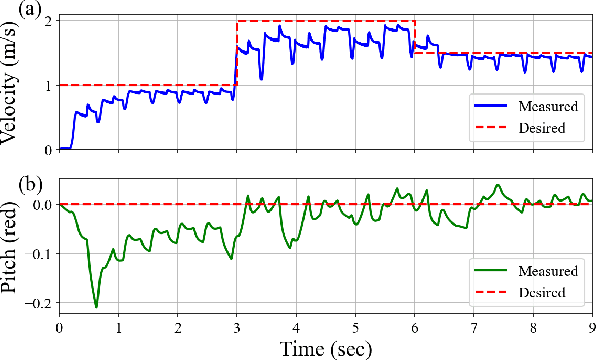
In this paper, we introduce a kinodynamic model predictive control (MPC) framework that exploits unidirectional parallel springs (UPS) to improve the energy efficiency of dynamic legged robots. The proposed method employs a hierarchical control structure, where the solution of MPC with simplified dynamic models is used to warm-start the kinodynamic MPC, which accounts for nonlinear centroidal dynamics and kinematic constraints. The proposed approach enables energy efficient dynamic hopping on legged robots by using UPS to reduce peak motor torques and energy consumption during stance phases. Simulation results demonstrated a 38.8% reduction in the cost of transport (CoT) for a monoped robot equipped with UPS during high-speed hopping. Additionally, preliminary hardware experiments show a 14.8% reduction in energy consumption. Video: https://youtu.be/AF11qMXJD48
Sense, Imagine, Act: Multimodal Perception Improves Model-Based Reinforcement Learning for Head-to-Head Autonomous Racing
May 08, 2023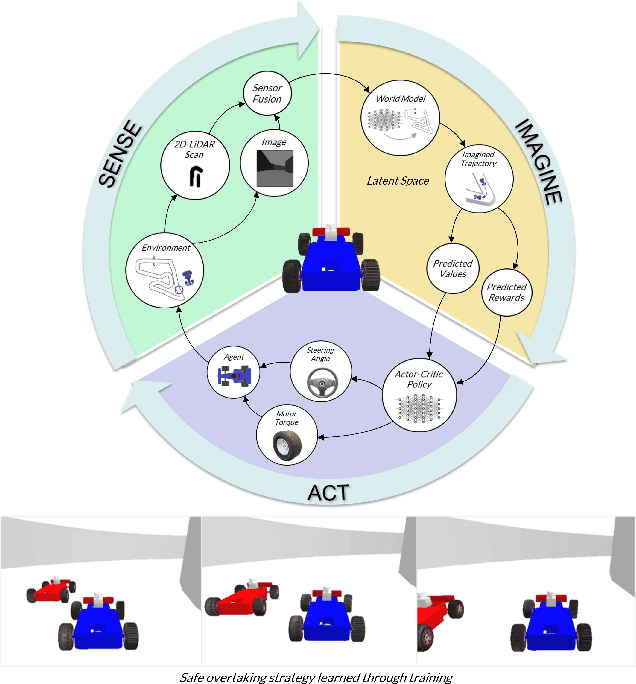
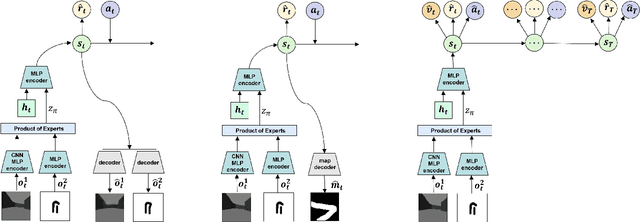
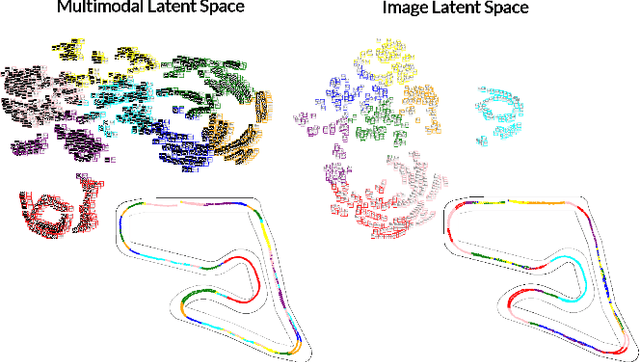
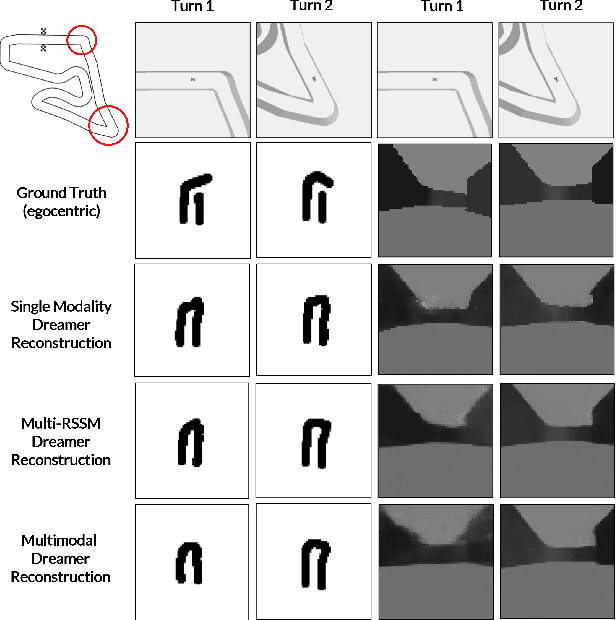
Model-based reinforcement learning (MBRL) techniques have recently yielded promising results for real-world autonomous racing using high-dimensional observations. MBRL agents, such as Dreamer, solve long-horizon tasks by building a world model and planning actions by latent imagination. This approach involves explicitly learning a model of the system dynamics and using it to learn the optimal policy for continuous control over multiple timesteps. As a result, MBRL agents may converge to sub-optimal policies if the world model is inaccurate. To improve state estimation for autonomous racing, this paper proposes a self-supervised sensor fusion technique that combines egocentric LiDAR and RGB camera observations collected from the F1TENTH Gym. The zero-shot performance of MBRL agents is empirically evaluated on unseen tracks and against a dynamic obstacle. This paper illustrates that multimodal perception improves robustness of the world model without requiring additional training data. The resulting multimodal Dreamer agent safely avoided collisions and won the most races compared to other tested baselines in zero-shot head-to-head autonomous racing.