 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHOPPY: An Open-source Kit for Education with Dynamic Legged Robots
Mar 15, 2021
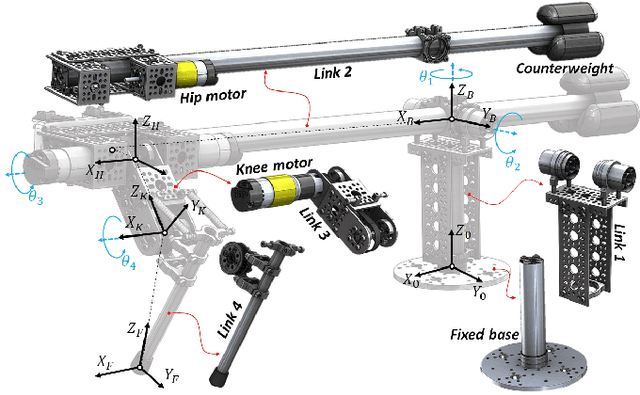
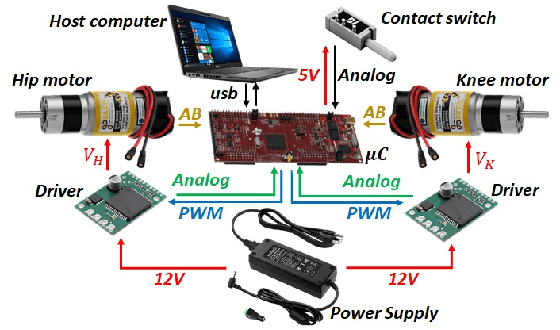
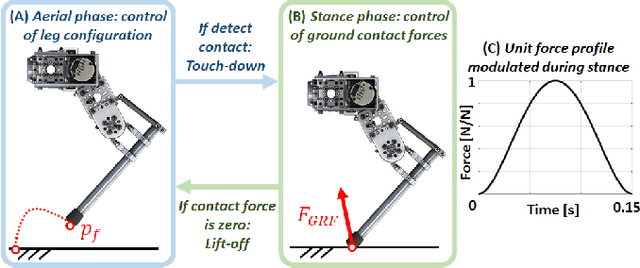
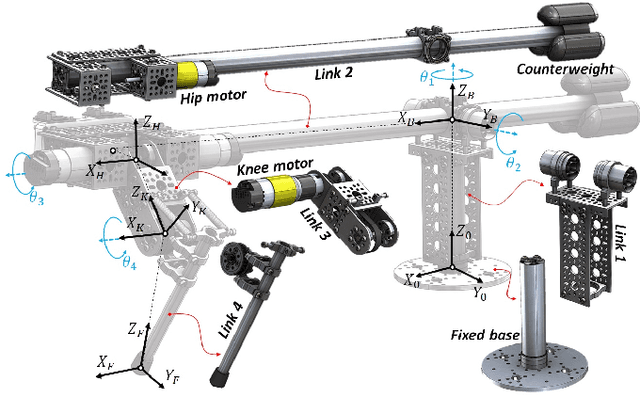
This paper introduces HOPPY, an open-source, low-cost, robust, and modular kit for robotics education. The robot dynamically hops around a rotating gantry with a fixed base. The kit is intended to lower the entry barrier for studying dynamic robots and legged locomotion with real systems. It bridges the theoretical content of fundamental robotic courses with real dynamic robots by facilitating and guiding the software and hardware integration. This paper describes the topics which can be studied using the kit, lists its components, discusses preferred practices for implementation, presents results from experiments with the simulator and the real system, and suggests further improvements. A simple heuristic-based controller is described to achieve velocities up to 1.7m/s, navigate small objects, and mitigate external disturbances when the robot is aided by a counterweight. HOPPY was utilized as the subject of a semester-long project for the Robot Dynamics and Control course at the University of Illinois at Urbana-Champaign. The positive feedback from the students and instructors about the hands-on activities during the course motivates us to share this kit and continue improving in the future.
The dynamic effect of mechanical losses of actuators on the equations of motion of legged robots
Nov 04, 2020
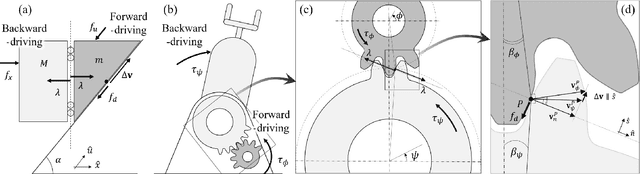
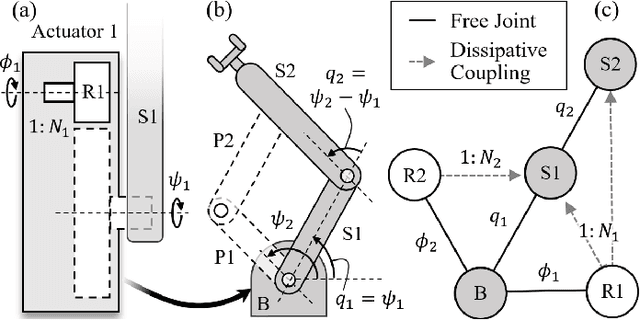
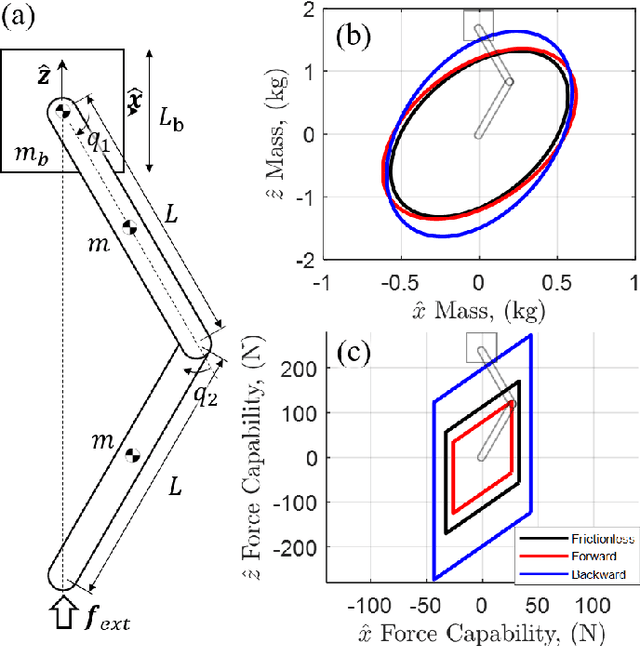
Industrial manipulators do not collapse under their own weight when powered off due to the friction in their joints. Although these mechanism are effective for stiff position control of pick-and-place, they are inappropriate for legged robots which must rapidly regulate compliant interactions with the environment. However, no metric exists to quantify the robot's perform degradation due to mechanical losses in the actuators. This letter provides a novel formulation which describes how the efficiency of individual actuators propagate to the equations of motion of the whole robot. We quantitatively demonstrate the intuitive fact that the apparent inertia of the robots increase in the presence of joint friction. We also reproduce the empirical result that robots which employ high gearing and low efficiency actuators can statically sustain more substantial external loads. We expect that the framework presented here will provide the foundations to design the next generation of legged robots which can effectively interact with the world.
HOPPY: An open-source and low-cost kit for dynamic robotics education
Oct 27, 2020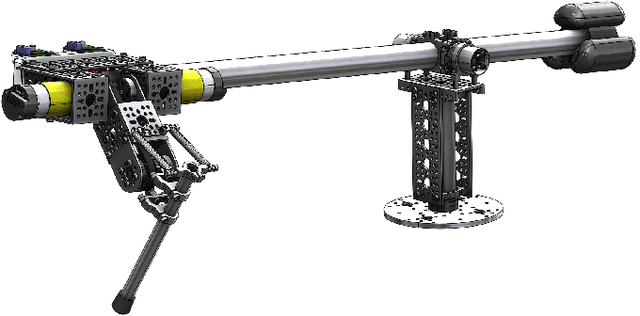
This letter introduces HOPPY, an open-source, low-cost, robust, and modular kit for robotics education. The robot dynamically hops around a rotating gantry with a fixed base. The kit lowers the entry barrier for studying dynamic robots and legged locomotion in real systems. The kit bridges the theoretical content of fundamental robotic courses and real dynamic robots by facilitating and guiding the software and hardware integration. This letter describes the topics which can be studied using the kit, lists its components, discusses best practices for implementation, presents results from experiments with the simulator and the real system, and suggests further improvements. A simple controller is described to achieve velocities up to 2m/s, navigate small objects, and mitigate external disturbances (kicks). HOPPY was utilized as the topic of a semester-long project for the Robot Dynamics and Control course at the University of Illinois at Urbana-Champaign. Students provided an overwhelmingly positive feedback from the hands-on activities during the course and the instructors will continue to improve the kit for upcoming semesters.