 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActuator-Constrained Reinforcement Learning for High-Speed Quadrupedal Locomotion
Dec 29, 2023This paper presents a method for achieving high-speed running of a quadruped robot by considering the actuator torque-speed operating region in reinforcement learning. The physical properties and constraints of the actuator are included in the training process to reduce state transitions that are infeasible in the real world due to motor torque-speed limitations. The gait reward is designed to distribute motor torque evenly across all legs, contributing to more balanced power usage and mitigating performance bottlenecks due to single-motor saturation. Additionally, we designed a lightweight foot to enhance the robot's agility. We observed that applying the motor operating region as a constraint helps the policy network avoid infeasible areas during sampling. With the trained policy, KAIST Hound, a 45 kg quadruped robot, can run up to 6.5 m/s, which is the fastest speed among electric motor-based quadruped robots.
Representation-Free Model Predictive Control for Dynamic Motions in Quadrupeds
Dec 18, 2020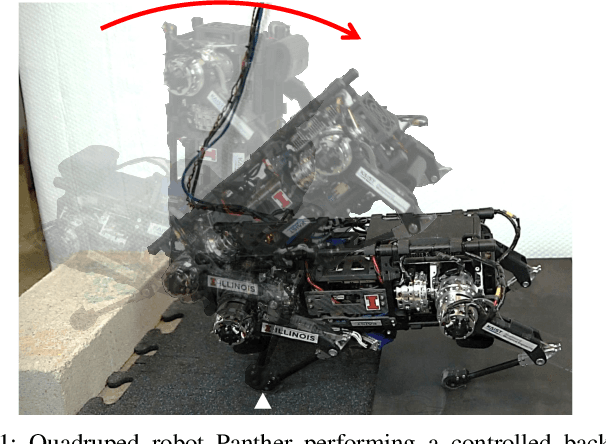
This paper presents a novel Representation-Free Model Predictive Control (RF-MPC) framework for controlling various dynamic motions of a quadrupedal robot in three dimensional (3D) space. Our formulation directly represents the rotational dynamics using the rotation matrix, which liberates us from the issues associated with the use of Euler angles and quaternion as the orientation representations. With a variation-based linearization scheme and a carefully constructed cost function, the MPC control law is transcribed to the standard Quadratic Program (QP) form. The MPC controller can operate at real-time rates of 250 Hz on a quadruped robot. Experimental results including periodic quadrupedal gaits and a controlled backflip validate that our control strategy could stabilize dynamic motions that involve singularity in 3D maneuvers.