 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Interval Branch-and-Bound-Based Inverse Kinemetics Algorithm Towards Global Optimal Redundancy Resolution
Apr 25, 2021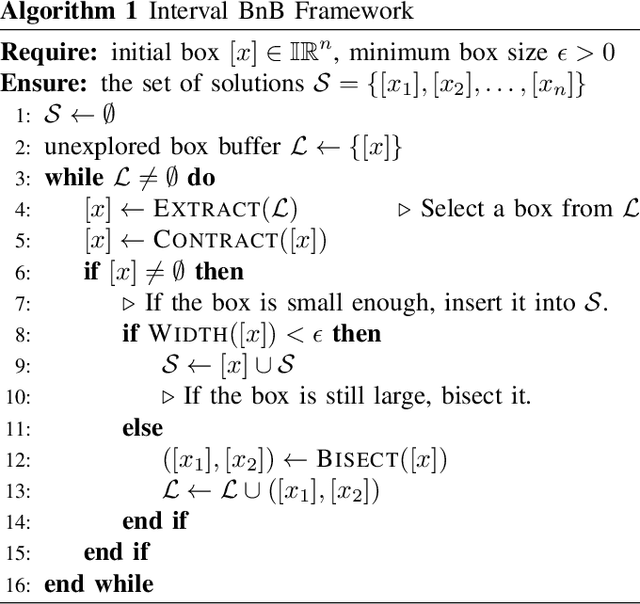

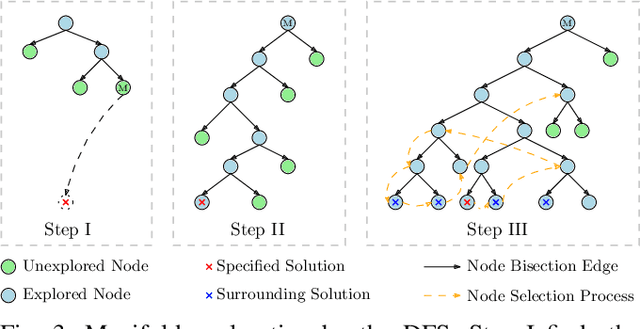
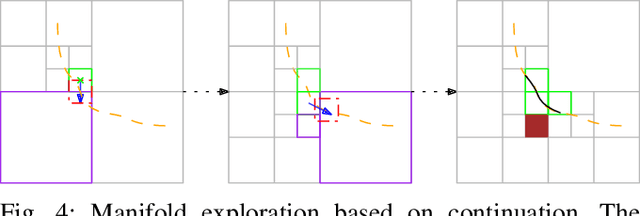
The general inverse kinematics (IK) problem of a manipulator, namely that of acquiring the self-motion manifold (SMM) of all admissible joint angles for a desired end-effector pose, plays a vital role in robotics modeling, planning and control. To efficiently solve the generalized IK, this paper proposes an interval branch-and-bound-based approach, which is augmented with a fast numerical IK-solver-enabled search heuristics. In comparison to independent solutions generated by sampling based methods, our approach generates patches of neighboring solutions to provide richer information of the inherent geometry of the SMM for optimal planning and other applications. It can also be utilized in an anytime fashion to obtain solutions with sub-optimal resolution for applications within a limited period. The performance of our approach is verified by numerical experiments on both non-redundant and redundant manipulators.
Optimization-Based Framework for Excavation Trajectory Generation
Oct 27, 2020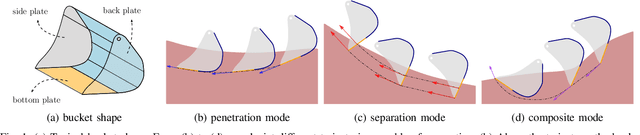
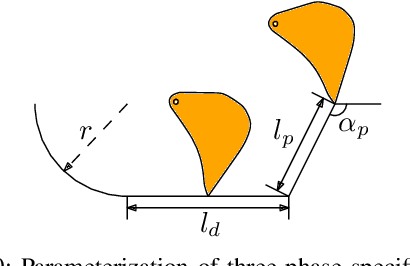
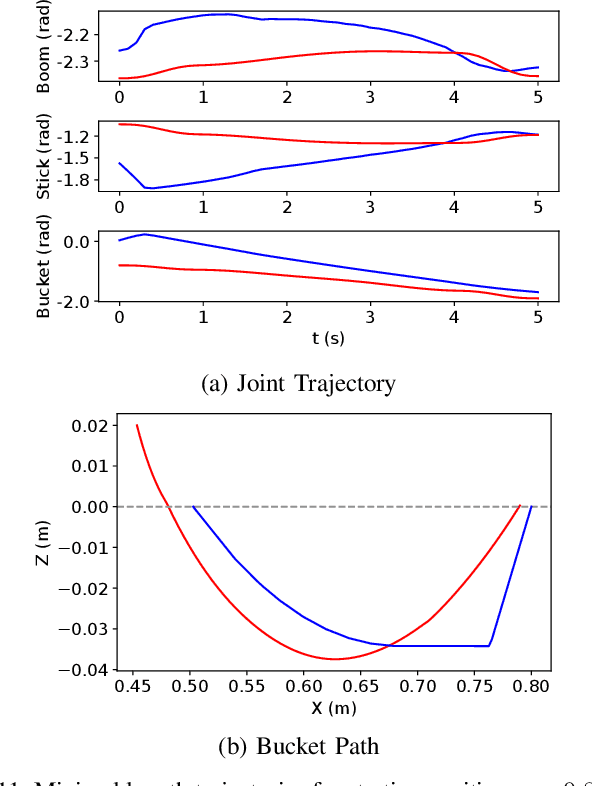
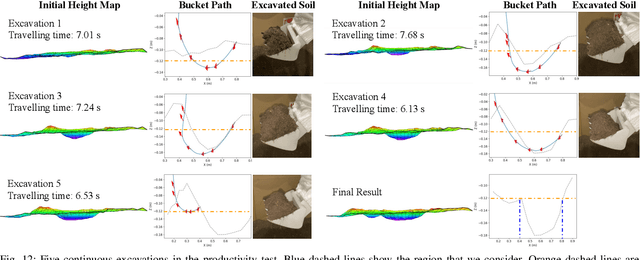
In this paper, we present a novel optimization-based framework for autonomous excavator trajectory generation under various objectives, including minimum joint displacement and minimum time. Traditional methods on excavation trajectory generation usually separate the excavation motion into a sequence of fixed phases, resulting in limited trajectory searching space. Our framework explores the space of all possible excavation trajectories represented with waypoints interpolated by a polynomial spline, thereby enabling optimization over a larger searching space. We formulate a generic task specification for excavation by constraining the instantaneous motion of the bucket and further add a target-oriented constraint, i.e. swept volume that indicates the estimated amount of excavated materials. To formulate time related objectives and constraints, we introduce time intervals between waypoints as variables into the optimization framework. We implement the proposed framework and evaluate its performance on a UR5 robotic arm. The experimental results demonstrate that the generated trajectories are able to excavate sufficient mass of soil for different terrain shapes and have 60% shorter minimal length than traditional excavation methods. We further compare our one-stage time optimal trajectory generation with the two-stage method. The result shows that trajectories generated by our one-stage method cost 18% less time on average.
Time Variable Minimum Torque Trajectory Optimization for Autonomous Excavator
Jun 01, 2020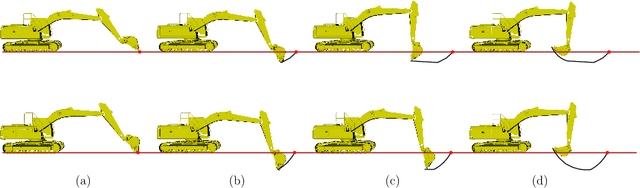

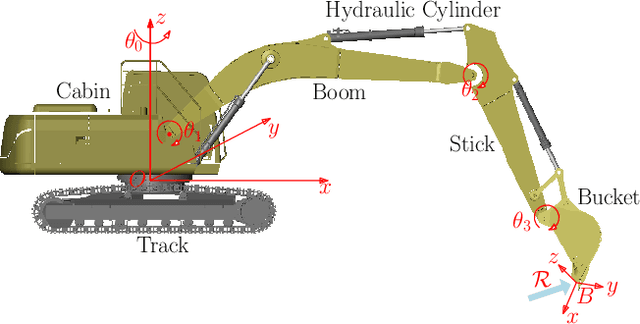
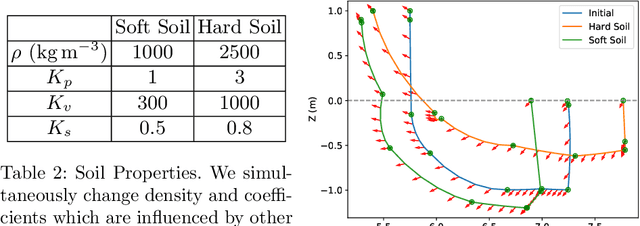
In this paper, we present a minimal torque and time variable trajectory optimization method for autonomous excavator considering the soil-tool interaction. The method formulates the excavation motion generation as a trajectory optimization problem and takes into account geometric, kinematic and dynamics constraints. To generate time-efficient trajectory and improve the overall optimization efficiency, we propose a time variable trajectory optimization mechanism so that the time intervals between the keypoints along the trajectory subject to the optimization. As a result, the method uses few keypoints and reduces the total number of optimization variables. We further introduce a soil-tool interaction force model, which considers the geometric shape of the bucket and the physical properties of the soil. The experimental result on a high fidelity dynamic simulator shows our method can generate feasible trajectories, which satisfy excavation task constraints and are adaptive to different soil conditions.
Deep Learning Scooping Motion using Bilateral Teleoperations
Oct 24, 2018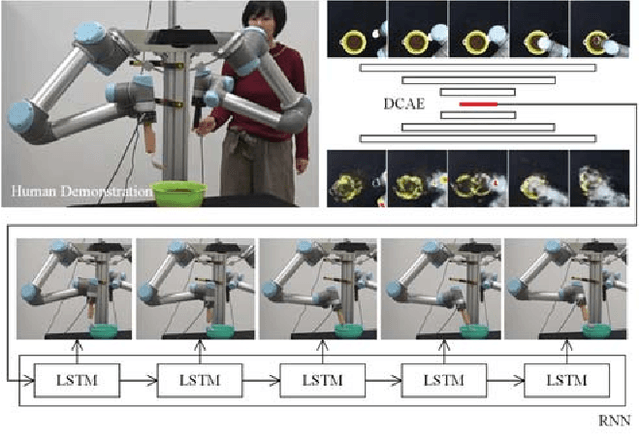

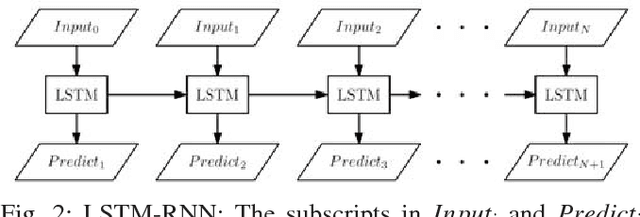
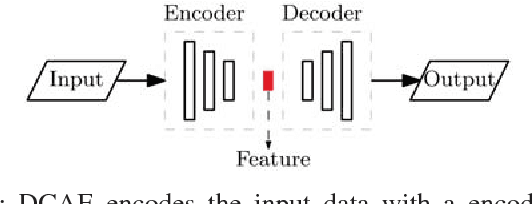
We present bilateral teleoperation system for task learning and robot motion generation. Our system includes a bilateral teleoperation platform and a deep learning software. The deep learning software refers to human demonstration using the bilateral teleoperation platform to collect visual images and robotic encoder values. It leverages the datasets of images and robotic encoder information to learn about the inter-modal correspondence between visual images and robot motion. In detail, the deep learning software uses a combination of Deep Convolutional Auto-Encoders (DCAE) over image regions, and Recurrent Neural Network with Long Short-Term Memory units (LSTM-RNN) over robot motor angles, to learn motion taught be human teleoperation. The learnt models are used to predict new motion trajectories for similar tasks. Experimental results show that our system has the adaptivity to generate motion for similar scooping tasks. Detailed analysis is performed based on failure cases of the experimental results. Some insights about the cans and cannots of the system are summarized.
A Novel GPU-based Parallel Implementation Scheme and Performance Analysis of Robot Forward Dynamics Algorithms
Sep 21, 2016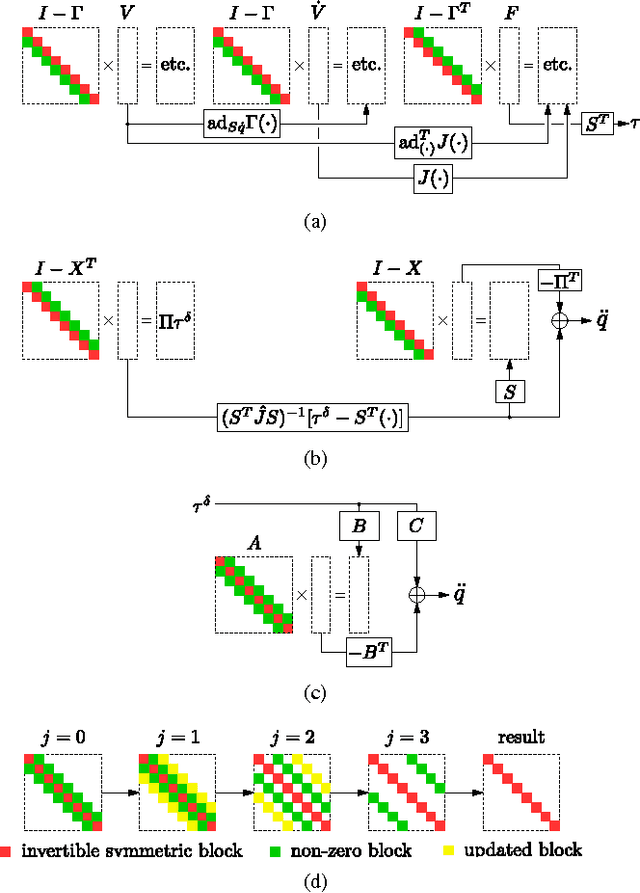
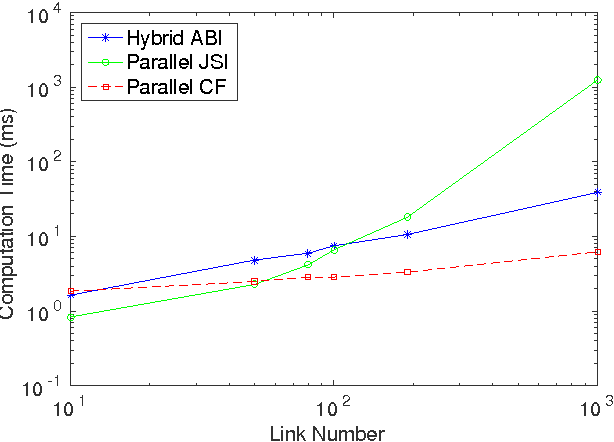
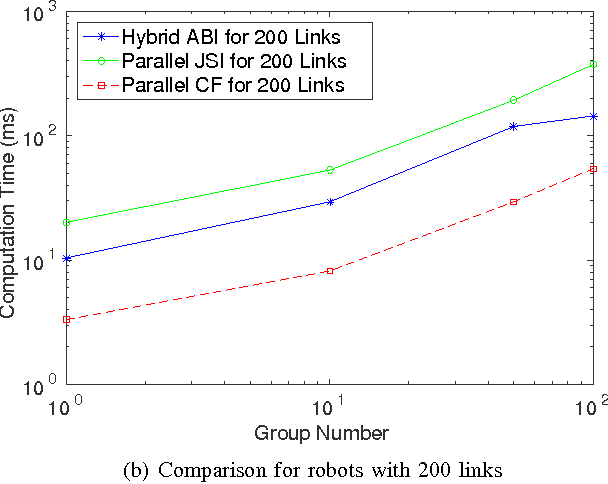
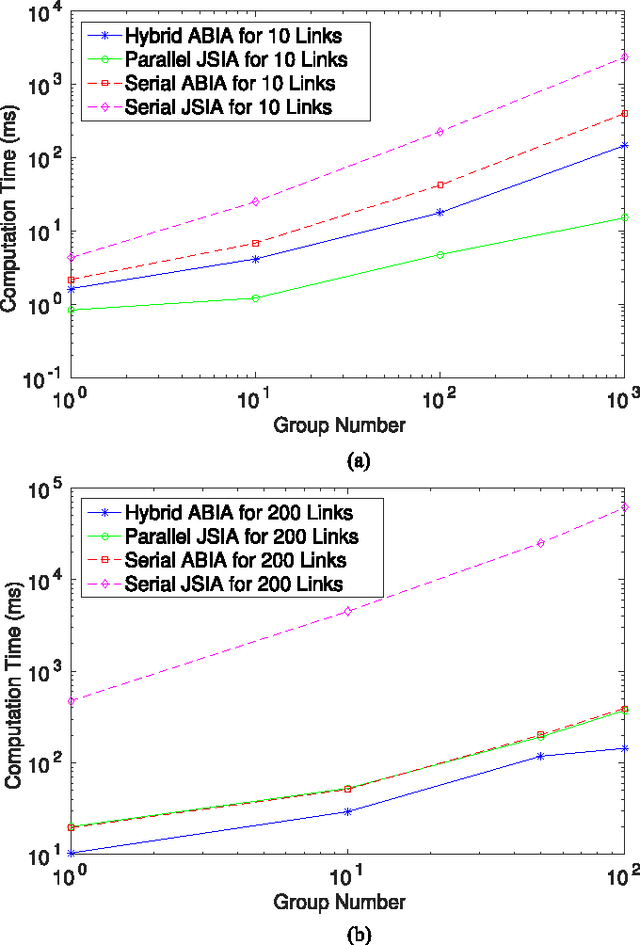
We propose a novel unifying scheme for parallel implementation of articulated robot dynamics algorithms. It is based on a unified Lie group notation for deriving the equations of motion of articulated robots, where various well-known forward algorithms differ only by their joint inertia matrix inversion strategies. This new scheme leads to a unified abstraction of state-of-the-art forward dynamics algorithms into combinations of block bi-diagonal and/or block tri-diagonal systems, which may be efficiently solved by parallel all-prefix-sum operations (scan) and parallel odd-even elimination (OEE) respectively. We implement the proposed scheme on a Nvidia CUDA GPU platform for the comparative study of three algorithms, namely the hybrid articulated-body inertia algorithm (ABIA), the parallel joint space inertia inversion algorithm (JSIIA) and the constrained force algorithm (CFA), and the performances are analyzed.
Parallel Dynamics Computation using Prefix Sum Operations
Sep 15, 2016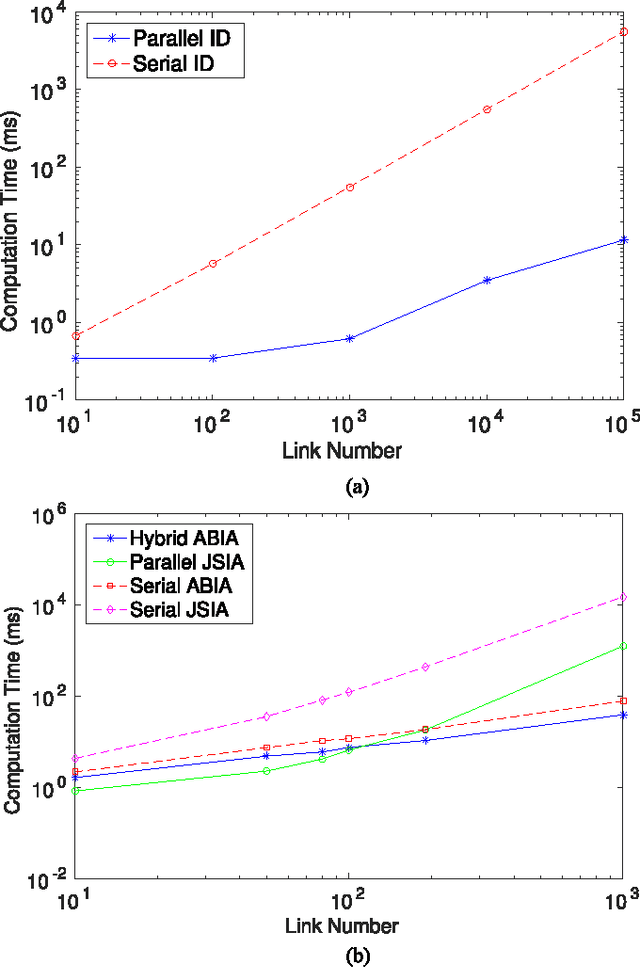
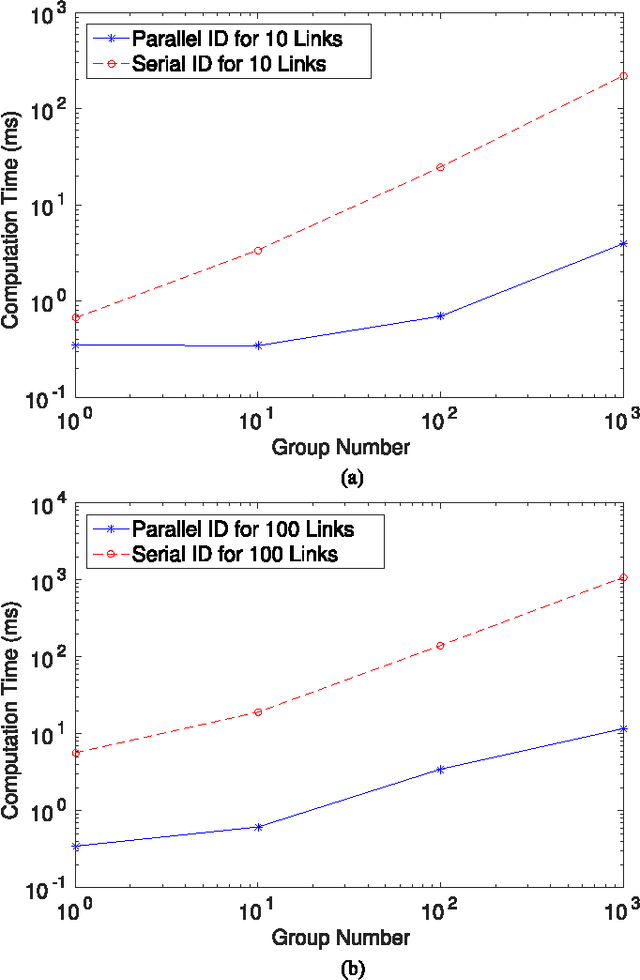
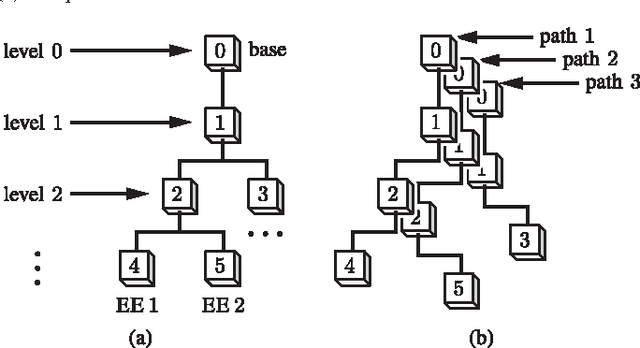
We propose a new parallel framework for fast computation of inverse and forward dynamics of articulated robots based on prefix sums (scans). We re-investigate the well-known recursive Newton-Euler formulation of robot dynamics and show that the forward-backward propagation process for robot inverse dynamics is equivalent to two scan operations on certain semigroups. We show that the state-of-the-art forward dynamics algorithms may almost completely be cast into a sequence of scan operations, with unscannable parts clearly identified. This suggests a serial-parallel hybrid approach for systems with a moderate number of links. We implement our scan based algorithms on Nvidia CUDA platform with performance compared with multithreading CPU-based recursive algorithms; a significant level of acceleration is demonstrated.