 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Dual-Weighting Framework for Federated Learning via Out-of-Distribution Detection
Feb 01, 2026Federated Learning (FL) enables collaborative model training across large-scale distributed service nodes while preserving data privacy, making it a cornerstone of intelligent service systems in edge-cloud environments. However, in real-world service-oriented deployments, data generated by heterogeneous users, devices, and application scenarios are inherently non-IID. This severe data heterogeneity critically undermines the convergence stability, generalization ability, and ultimately the quality of service delivered by the global model. To address this challenge, we propose FLood, a novel FL framework inspired by out-of-distribution (OOD) detection. FLood dynamically counteracts the adverse effects of heterogeneity through a dual-weighting mechanism that jointly governs local training and global aggregation. At the client level, it adaptively reweights the supervised loss by upweighting pseudo-OOD samples, thereby encouraging more robust learning from distributionally misaligned or challenging data. At the server level, it refines model aggregation by weighting client contributions according to their OOD confidence scores, prioritizing updates from clients with higher in-distribution consistency and enhancing the global model's robustness and convergence stability. Extensive experiments across multiple benchmarks under diverse non-IID settings demonstrate that FLood consistently outperforms state-of-the-art FL methods in both accuracy and generalization. Furthermore, FLood functions as an orthogonal plug-in module: it seamlessly integrates with existing FL algorithms to boost their performance under heterogeneity without modifying their core optimization logic. These properties make FLood a practical and scalable solution for deploying reliable intelligent services in real-world federated environments.
An Interval Branch-and-Bound-Based Inverse Kinemetics Algorithm Towards Global Optimal Redundancy Resolution
Apr 25, 2021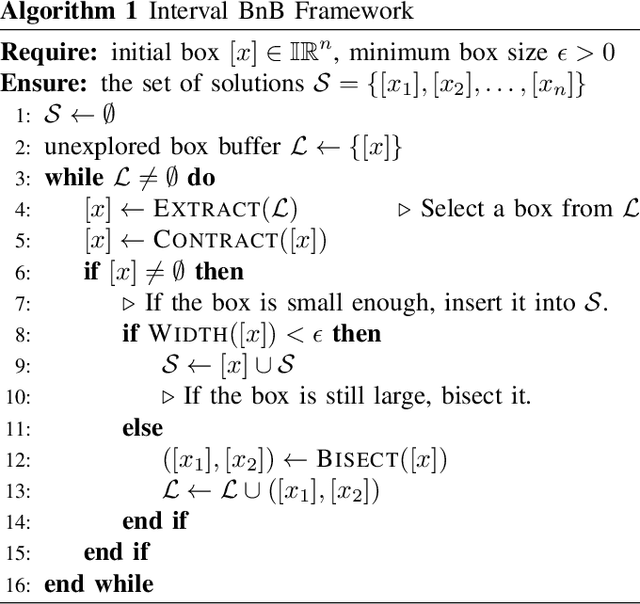

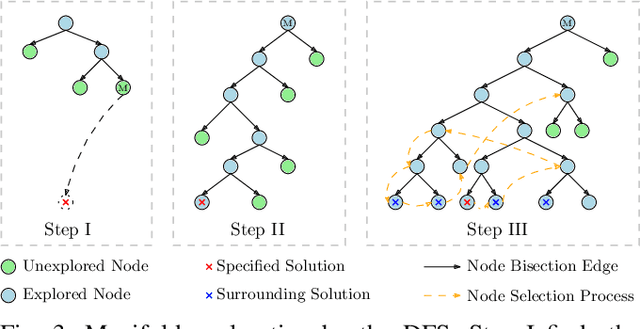
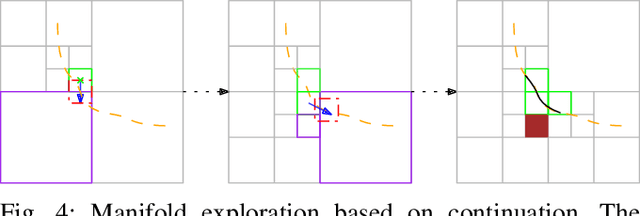
The general inverse kinematics (IK) problem of a manipulator, namely that of acquiring the self-motion manifold (SMM) of all admissible joint angles for a desired end-effector pose, plays a vital role in robotics modeling, planning and control. To efficiently solve the generalized IK, this paper proposes an interval branch-and-bound-based approach, which is augmented with a fast numerical IK-solver-enabled search heuristics. In comparison to independent solutions generated by sampling based methods, our approach generates patches of neighboring solutions to provide richer information of the inherent geometry of the SMM for optimal planning and other applications. It can also be utilized in an anytime fashion to obtain solutions with sub-optimal resolution for applications within a limited period. The performance of our approach is verified by numerical experiments on both non-redundant and redundant manipulators.
A Novel GPU-based Parallel Implementation Scheme and Performance Analysis of Robot Forward Dynamics Algorithms
Sep 21, 2016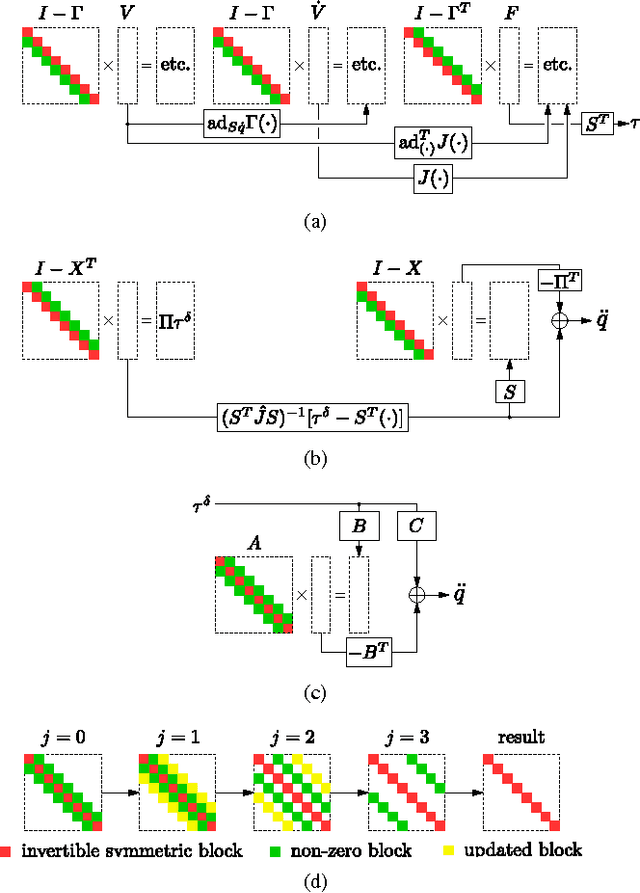
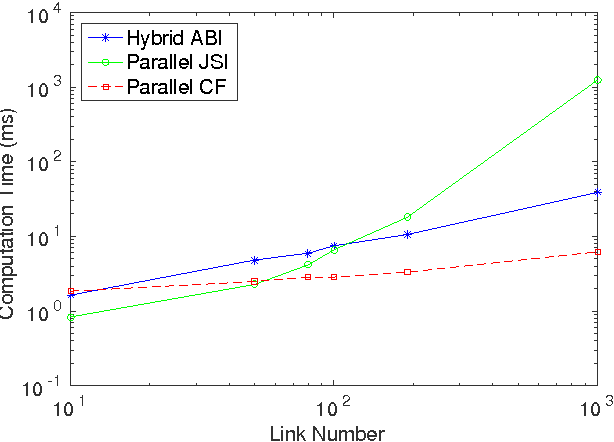
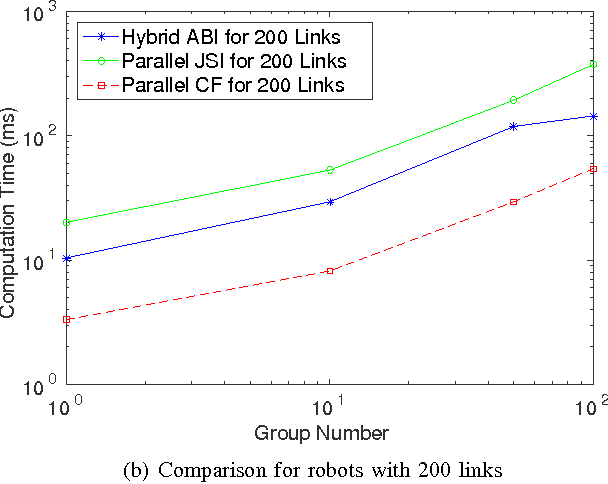
We propose a novel unifying scheme for parallel implementation of articulated robot dynamics algorithms. It is based on a unified Lie group notation for deriving the equations of motion of articulated robots, where various well-known forward algorithms differ only by their joint inertia matrix inversion strategies. This new scheme leads to a unified abstraction of state-of-the-art forward dynamics algorithms into combinations of block bi-diagonal and/or block tri-diagonal systems, which may be efficiently solved by parallel all-prefix-sum operations (scan) and parallel odd-even elimination (OEE) respectively. We implement the proposed scheme on a Nvidia CUDA GPU platform for the comparative study of three algorithms, namely the hybrid articulated-body inertia algorithm (ABIA), the parallel joint space inertia inversion algorithm (JSIIA) and the constrained force algorithm (CFA), and the performances are analyzed.
Parallel Dynamics Computation using Prefix Sum Operations
Sep 15, 2016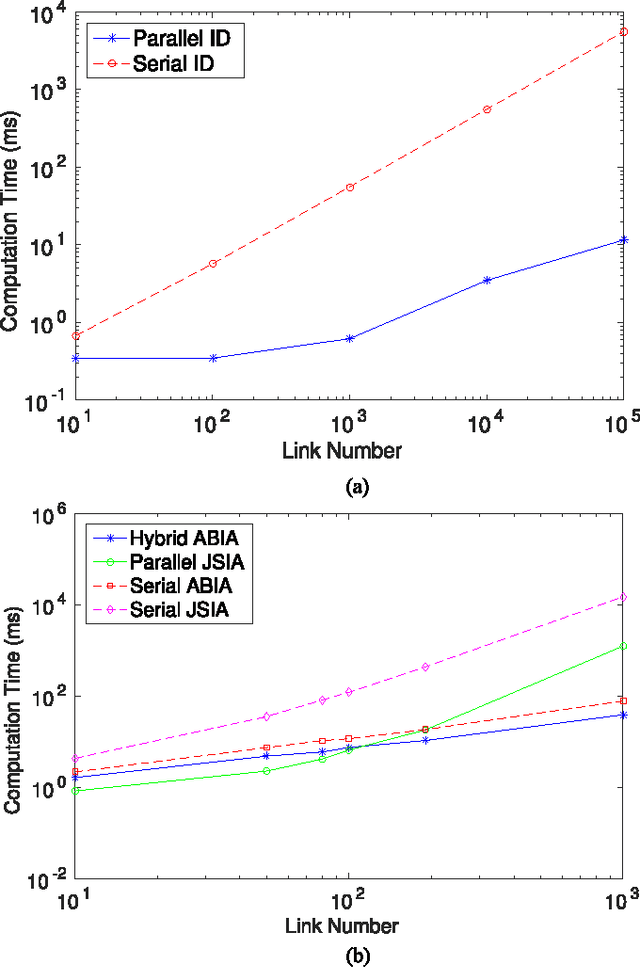
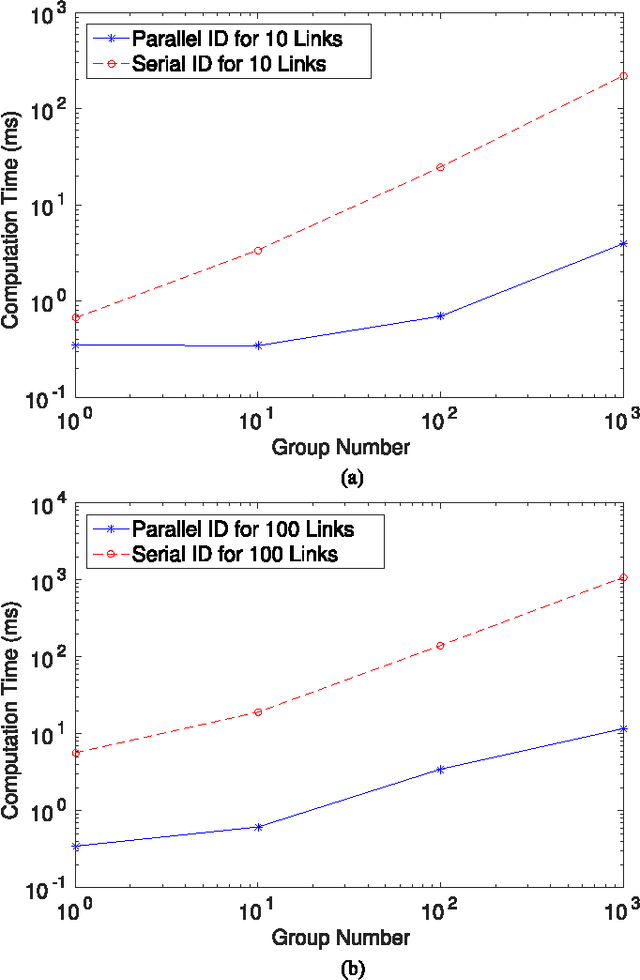
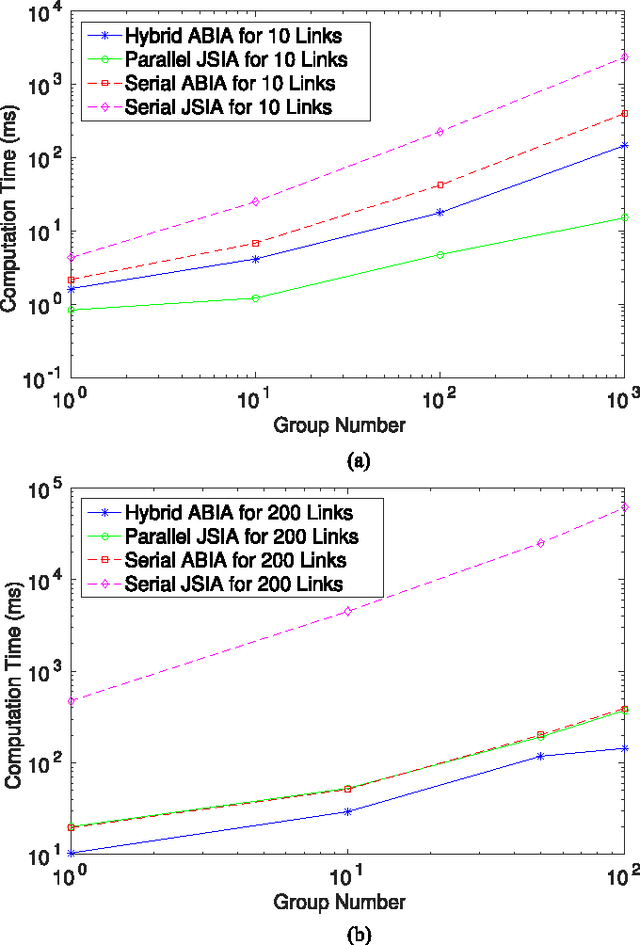
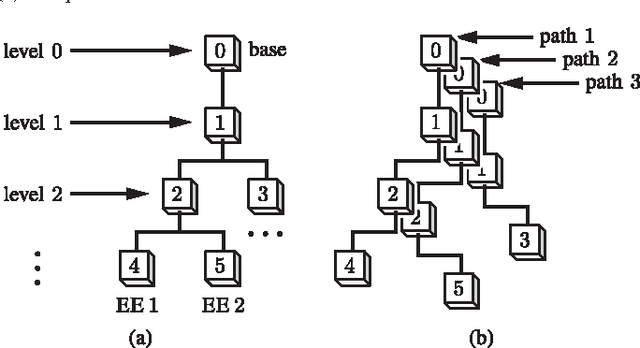
We propose a new parallel framework for fast computation of inverse and forward dynamics of articulated robots based on prefix sums (scans). We re-investigate the well-known recursive Newton-Euler formulation of robot dynamics and show that the forward-backward propagation process for robot inverse dynamics is equivalent to two scan operations on certain semigroups. We show that the state-of-the-art forward dynamics algorithms may almost completely be cast into a sequence of scan operations, with unscannable parts clearly identified. This suggests a serial-parallel hybrid approach for systems with a moderate number of links. We implement our scan based algorithms on Nvidia CUDA platform with performance compared with multithreading CPU-based recursive algorithms; a significant level of acceleration is demonstrated.