 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel GPU-based Parallel Implementation Scheme and Performance Analysis of Robot Forward Dynamics Algorithms
Paper and Code
Sep 21, 2016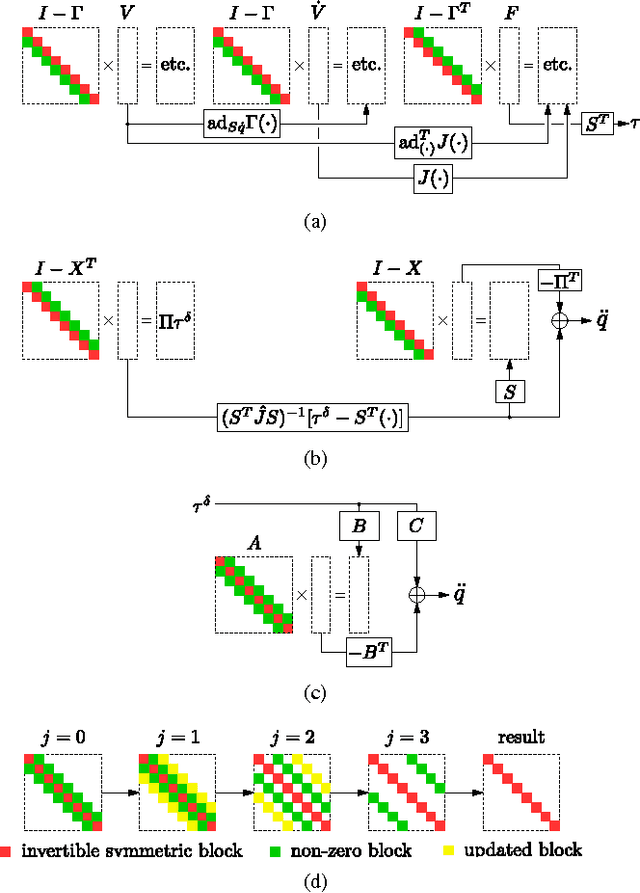
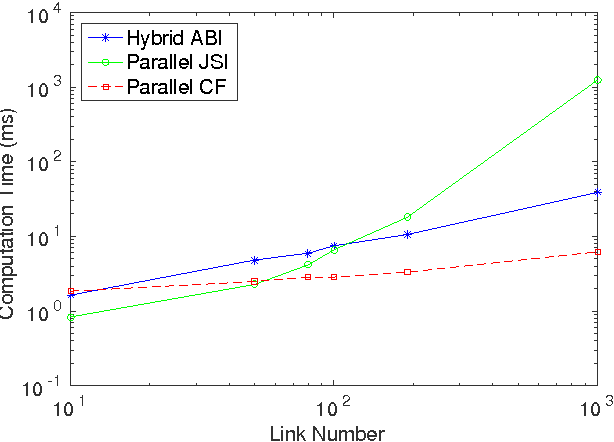
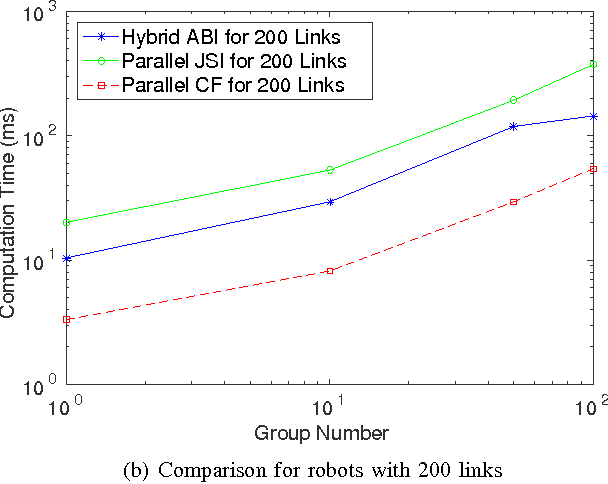
We propose a novel unifying scheme for parallel implementation of articulated robot dynamics algorithms. It is based on a unified Lie group notation for deriving the equations of motion of articulated robots, where various well-known forward algorithms differ only by their joint inertia matrix inversion strategies. This new scheme leads to a unified abstraction of state-of-the-art forward dynamics algorithms into combinations of block bi-diagonal and/or block tri-diagonal systems, which may be efficiently solved by parallel all-prefix-sum operations (scan) and parallel odd-even elimination (OEE) respectively. We implement the proposed scheme on a Nvidia CUDA GPU platform for the comparative study of three algorithms, namely the hybrid articulated-body inertia algorithm (ABIA), the parallel joint space inertia inversion algorithm (JSIIA) and the constrained force algorithm (CFA), and the performances are analyzed.