 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime Variable Minimum Torque Trajectory Optimization for Autonomous Excavator
Paper and Code
Jun 01, 2020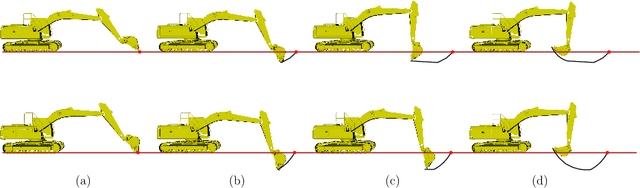

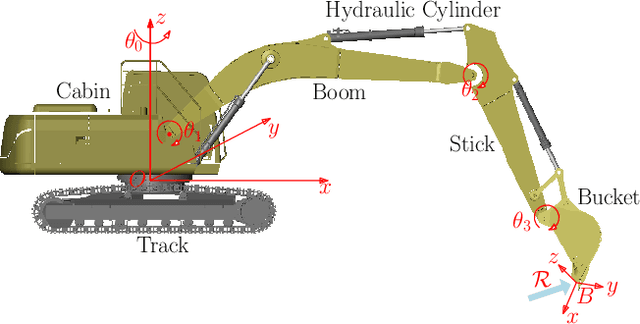
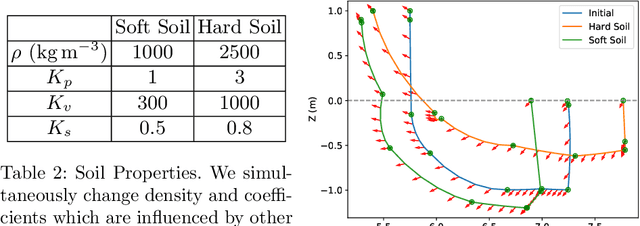
In this paper, we present a minimal torque and time variable trajectory optimization method for autonomous excavator considering the soil-tool interaction. The method formulates the excavation motion generation as a trajectory optimization problem and takes into account geometric, kinematic and dynamics constraints. To generate time-efficient trajectory and improve the overall optimization efficiency, we propose a time variable trajectory optimization mechanism so that the time intervals between the keypoints along the trajectory subject to the optimization. As a result, the method uses few keypoints and reduces the total number of optimization variables. We further introduce a soil-tool interaction force model, which considers the geometric shape of the bucket and the physical properties of the soil. The experimental result on a high fidelity dynamic simulator shows our method can generate feasible trajectories, which satisfy excavation task constraints and are adaptive to different soil conditions.