 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMedLSAM: Localize and Segment Anything Model for 3D Medical Images
Jun 30, 2023The Segment Anything Model (SAM) has recently emerged as a groundbreaking model in the field of image segmentation. Nevertheless, both the original SAM and its medical adaptations necessitate slice-by-slice annotations, which directly increase the annotation workload with the size of the dataset. We propose MedLSAM to address this issue, ensuring a constant annotation workload irrespective of dataset size and thereby simplifying the annotation process. Our model introduces a few-shot localization framework capable of localizing any target anatomical part within the body. To achieve this, we develop a Localize Anything Model for 3D Medical Images (MedLAM), utilizing two self-supervision tasks: relative distance regression (RDR) and multi-scale similarity (MSS) across a comprehensive dataset of 14,012 CT scans. We then establish a methodology for accurate segmentation by integrating MedLAM with SAM. By annotating only six extreme points across three directions on a few templates, our model can autonomously identify the target anatomical region on all data scheduled for annotation. This allows our framework to generate a 2D bounding box for every slice of the image, which are then leveraged by SAM to carry out segmentations. We conducted experiments on two 3D datasets covering 38 organs and found that MedLSAM matches the performance of SAM and its medical adaptations while requiring only minimal extreme point annotations for the entire dataset. Furthermore, MedLAM has the potential to be seamlessly integrated with future 3D SAM models, paving the way for enhanced performance. Our code is public at https://github.com/openmedlab/MedLSAM.
Hybrid aerial ground locomotion with a single passive wheel
Mar 20, 2020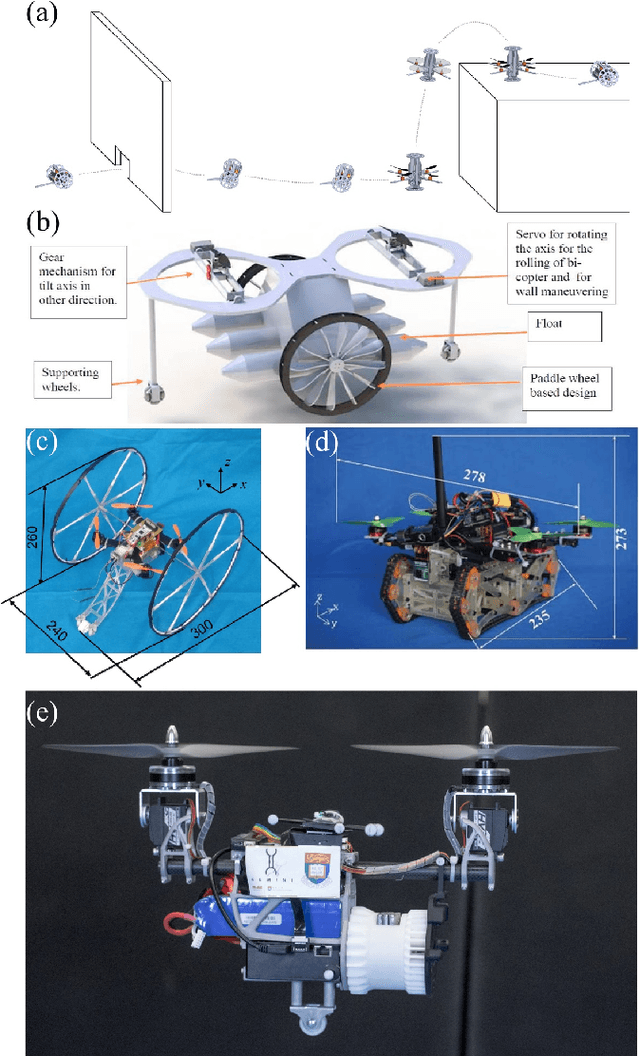
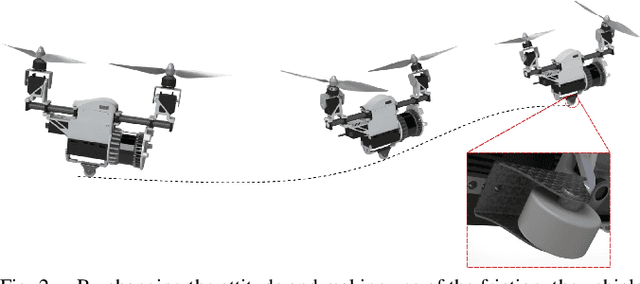
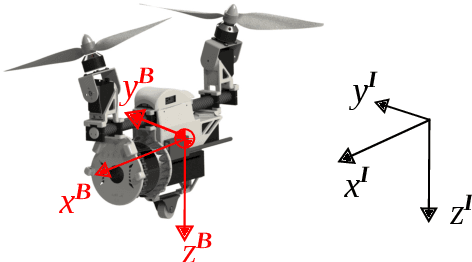
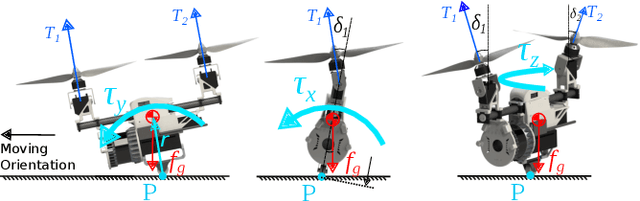
Exploiting contacts with environment structures provides extra force support to a UAV, often reducing the power consumption and hence extending the mission time. This paper investigates one such way to exploit flat surfaces in the environment by a novel aerial-ground hybrid locomotion. Our design is a single passive wheel integrated at the UAV bottom, serving a minimal design to date. We present the principle and implementation of such a simple design as well as its control. Flight experiments are conducted to verify the feasibility and the power saving caused by the ground locomotion. Results show that our minimal design allows successful aerial-ground hybrid locomotion even with a less-controllable bi-copter UAV. The ground locomotion saves up to 77% battery without much tuning effort.
Deep Distance Transform for Tubular Structure Segmentation in CT Scans
Dec 06, 2019



Tubular structure segmentation in medical images, e.g., segmenting vessels in CT scans, serves as a vital step in the use of computers to aid in screening early stages of related diseases. But automatic tubular structure segmentation in CT scans is a challenging problem, due to issues such as poor contrast, noise and complicated background. A tubular structure usually has a cylinder-like shape which can be well represented by its skeleton and cross-sectional radii (scales). Inspired by this, we propose a geometry-aware tubular structure segmentation method, Deep Distance Transform (DDT), which combines intuitions from the classical distance transform for skeletonization and modern deep segmentation networks. DDT first learns a multi-task network to predict a segmentation mask for a tubular structure and a distance map. Each value in the map represents the distance from each tubular structure voxel to the tubular structure surface. Then the segmentation mask is refined by leveraging the shape prior reconstructed from the distance map. We apply our DDT on six medical image datasets. The experiments show that (1) DDT can boost tubular structure segmentation performance significantly (e.g., over 13% improvement measured by DSC for pancreatic duct segmentation), and (2) DDT additionally provides a geometrical measurement for a tubular structure, which is important for clinical diagnosis (e.g., the cross-sectional scale of a pancreatic duct can be an indicator for pancreatic cancer).
Large-scale Artificial Neural Network: MapReduce-based Deep Learning
Oct 09, 2015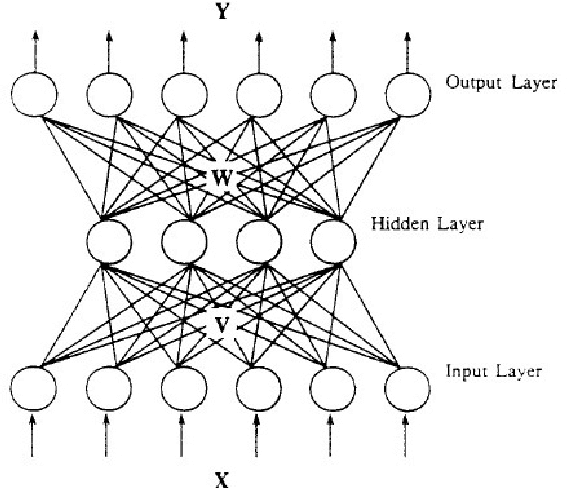
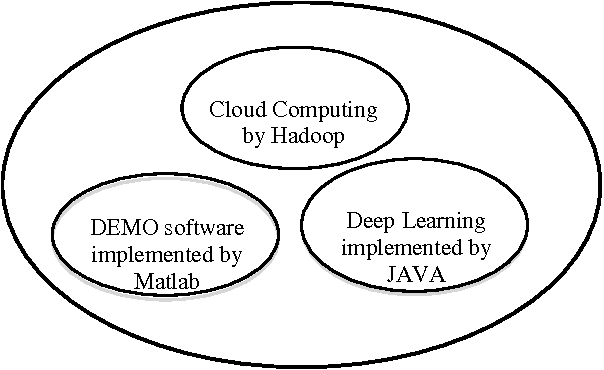
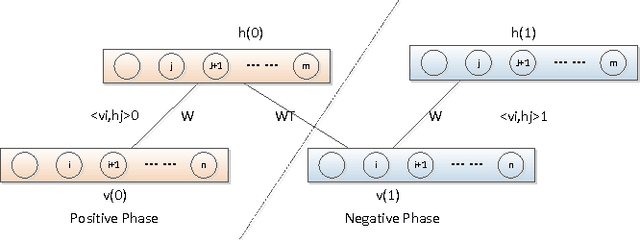

Faced with continuously increasing scale of data, original back-propagation neural network based machine learning algorithm presents two non-trivial challenges: huge amount of data makes it difficult to maintain both efficiency and accuracy; redundant data aggravates the system workload. This project is mainly focused on the solution to the issues above, combining deep learning algorithm with cloud computing platform to deal with large-scale data. A MapReduce-based handwriting character recognizer will be designed in this project to verify the efficiency improvement this mechanism will achieve on training and practical large-scale data. Careful discussion and experiment will be developed to illustrate how deep learning algorithm works to train handwritten digits data, how MapReduce is implemented on deep learning neural network, and why this combination accelerates computation. Besides performance, the scalability and robustness will be mentioned in this report as well. Our system comes with two demonstration software that visually illustrates our handwritten digit recognition/encoding application.