 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkillForge: Forging Domain-Specific, Self-Evolving Agent Skills in Cloud Technical Support
Apr 09, 2026Deploying LLM-powered agents in enterprise scenarios such as cloud technical support demands high-quality, domain-specific skills. However, existing skill creators lack domain grounding, producing skills poorly aligned with real-world task requirements. Moreover, once deployed, there is no systematic mechanism to trace execution failures back to skill deficiencies and drive targeted refinements, leaving skill quality stagnant despite accumulating operational evidence. We introduce SkillForge, a self-evolving framework that closes an end-to-end creation-evaluation-refinement loop. To produce well-aligned initial skills, a Domain-Contextualized Skill Creator grounds skill synthesis in knowledge bases and historical support tickets. To enable continuous self-optimization, a three-stage pipeline -- Failure Analyzer, Skill Diagnostician, and Skill Optimizer -- automatically diagnoses execution failures in batch, pinpoints the underlying skill deficiencies, and rewrites the skill to eliminate them. This cycle runs iteratively, allowing skills to self-improve with every round of deployment feedback. Evaluated on five real-world cloud support scenarios spanning 1,883 tickets and 3,737 tasks, experiments show that: (1) the Domain-Contextualized Skill Creator produces substantially better initial skills than the generic skill creator, as measured by consistency with expert-authored reference responses from historical tickets; and (2) the self-evolution loop progressively improves skill quality from diverse starting points (including expert-authored, domain-created, and generic skills) across successive rounds, demonstrating that automated evolution can surpass manually curated expert knowledge.
CirrusBench: Evaluating LLM-based Agents Beyond Correctness in Real-World Cloud Service Environments
Mar 30, 2026The increasing agentic capabilities of Large Language Models (LLMs) have enabled their deployment in real-world applications, such as cloud services, where customer-assistant interactions exhibit high technical complexity and long-horizon dependencies, making robustness and resolution efficiency critical for customer satisfaction. However, existing benchmarks for LLM-based agents largely rely on synthetic environments that fail to capture the diversity and unpredictability of authentic customer inputs, often ignoring the resolution efficiency essential for real-world deployment. To bridge this gap, we introduce CirrusBench, a novel evaluation framework distinguished by its foundation in real-world data from authentic cloud service tickets. CirrusBench preserves the intricate multi-turn logical chains and realistic tool dependencies inherent to technical service environments. Moving beyond execution correctness, we introduce novel Customer-Centric metrics to define agent success, quantifying service quality through metrics such as the Normalized Efficiency Index and Multi-Turn Latency to explicitly measure resolution efficiency. Experiments utilizing our framework reveal that while state-of-the-art models demonstrate strong reasoning capabilities, they frequently struggle in complex, realistic multi-turn tasks and fail to meet the high-efficiency standards required for customer service, highlighting critical directions for the future development of LLM-based agents in practical technical service applications. CirrusBench evaluation framework is released at: https://github.com/CirrusAI
Lightweight Adaptation for LLM-based Technical Service Agent: Latent Logic Augmentation and Robust Noise Reduction
Mar 18, 2026Adapting Large Language Models in complex technical service domains is constrained by the absence of explicit cognitive chains in human demonstrations and the inherent ambiguity arising from the diversity of valid responses. These limitations severely hinder agents from internalizing latent decision dynamics and generalizing effectively. Moreover, practical adaptation is often impeded by the prohibitive resource and time costs associated with standard training paradigms. To overcome these challenges and guarantee computational efficiency, we propose a lightweight adaptation framework comprising three key contributions. (1) Latent Logic Augmentation: We introduce Planning-Aware Trajectory Modeling and Decision Reasoning Augmentation to bridge the gap between surface-level supervision and latent decision logic. These approaches strengthen the stability of Supervised Fine-Tuning alignment. (2) Robust Noise Reduction: We construct a Multiple Ground Truths dataset through a dual-filtering method to reduce the noise by validating diverse responses, thereby capturing the semantic diversity. (3) Lightweight Adaptation: We design a Hybrid Reward mechanism that fuses an LLM-based judge with a lightweight relevance-based Reranker to distill high-fidelity reward signals while reducing the computational cost compared to standard LLM-as-a-Judge reinforcement learning. Empirical evaluations on real-world Cloud service tasks, conducted across semantically diverse settings, demonstrate that our framework achieves stability and performance gains through Latent Logic Augmentation and Robust Noise Reduction. Concurrently, our Hybrid Reward mechanism achieves alignment comparable to standard LLM-as-a-judge methods with reduced training time, underscoring the practical value for deploying technical service agents.
S$^2$R: Teaching LLMs to Self-verify and Self-correct via Reinforcement Learning
Feb 18, 2025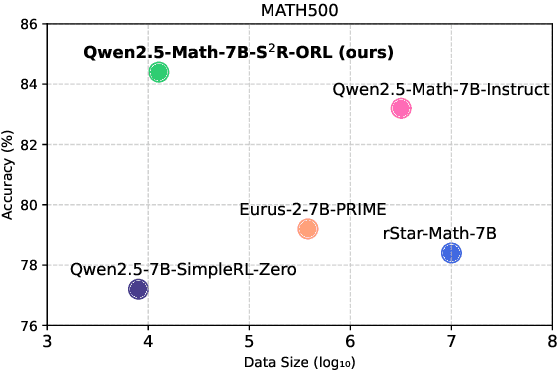
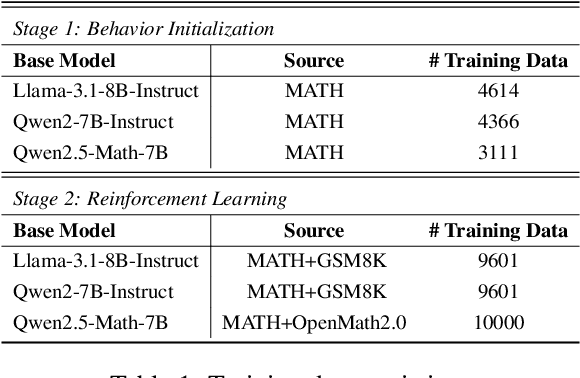
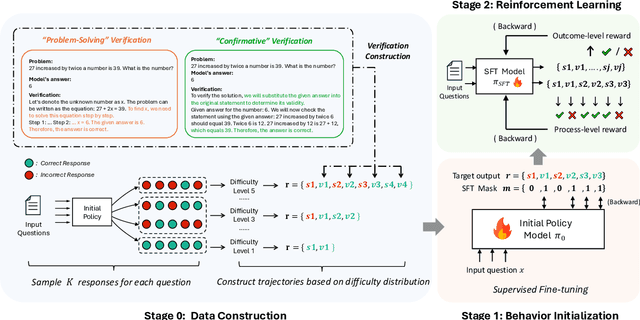
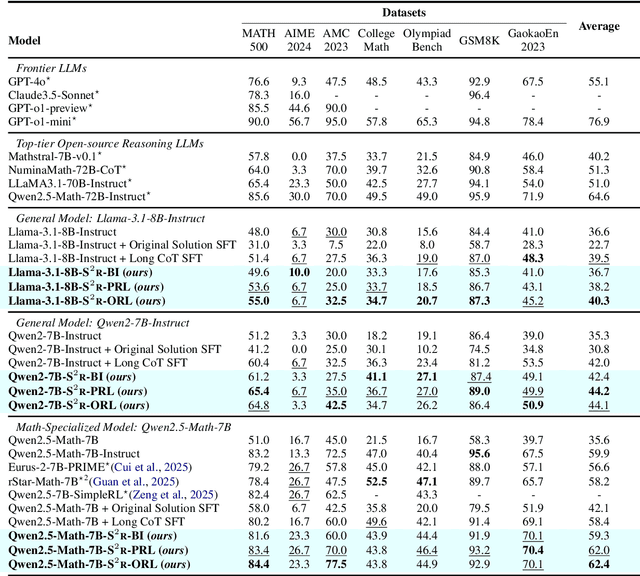
Recent studies have demonstrated the effectiveness of LLM test-time scaling. However, existing approaches to incentivize LLMs' deep thinking abilities generally require large-scale data or significant training efforts. Meanwhile, it remains unclear how to improve the thinking abilities of less powerful base models. In this work, we introduce S$^2$R, an efficient framework that enhances LLM reasoning by teaching models to self-verify and self-correct during inference. Specifically, we first initialize LLMs with iterative self-verification and self-correction behaviors through supervised fine-tuning on carefully curated data. The self-verification and self-correction skills are then further strengthened by both outcome-level and process-level reinforcement learning, with minimized resource requirements, enabling the model to adaptively refine its reasoning process during inference. Our results demonstrate that, with only 3.1k self-verifying and self-correcting behavior initialization samples, Qwen2.5-math-7B achieves an accuracy improvement from 51.0\% to 81.6\%, outperforming models trained on an equivalent amount of long-CoT distilled data. Extensive experiments and analysis based on three base models across both in-domain and out-of-domain benchmarks validate the effectiveness of S$^2$R. Our code and data are available at https://github.com/NineAbyss/S2R.
JGR-P2O: Joint Graph Reasoning based Pixel-to-Offset Prediction Network for 3D Hand Pose Estimation from a Single Depth Image
Jul 10, 2020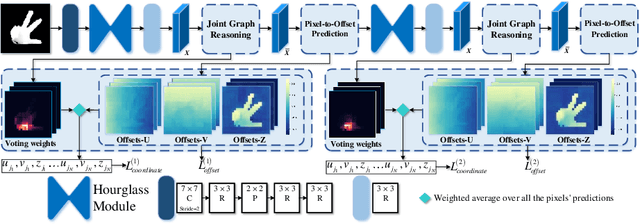
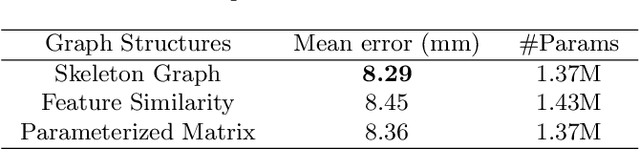
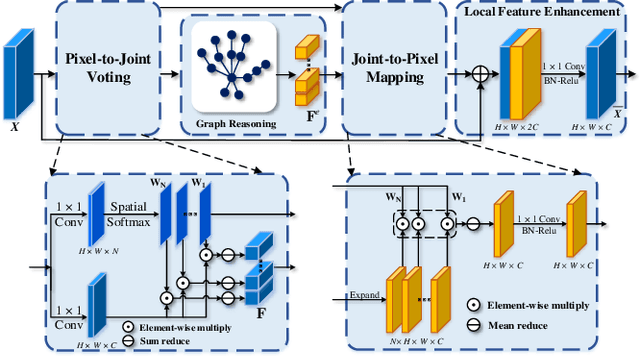
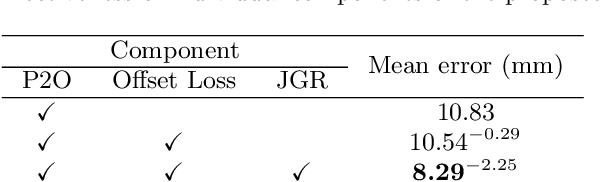
State-of-the-art single depth image-based 3D hand pose estimation methods are based on dense predictions, including voxel-to-voxel predictions, point-to-point regression, and pixel-wise estimations. Despite the good performance, those methods have a few issues in nature, such as the poor trade-off between accuracy and efficiency, and plain feature representation learning with local convolutions. In this paper, a novel pixel-wise prediction-based method is proposed to address the above issues. The key ideas are two-fold: a) explicitly modeling the dependencies among joints and the relations between the pixels and the joints for better local feature representation learning; b) unifying the dense pixel-wise offset predictions and direct joint regression for end-to-end training. Specifically, we first propose a graph convolutional network (GCN) based joint graph reasoning module to model the complex dependencies among joints and augment the representation capability of each pixel. Then we densely estimate all pixels' offsets to joints in both image plane and depth space and calculate the joints' positions by a weighted average over all pixels' predictions, totally discarding the complex postprocessing operations. The proposed model is implemented with an efficient 2D fully convolutional network (FCN) backbone and has only about 1.4M parameters. Extensive experiments on multiple 3D hand pose estimation benchmarks demonstrate that the proposed method achieves new state-of-the-art accuracy while running very efficiently with around a speed of 110fps on a single NVIDIA 1080Ti GPU.