 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJGR-P2O: Joint Graph Reasoning based Pixel-to-Offset Prediction Network for 3D Hand Pose Estimation from a Single Depth Image
Paper and Code
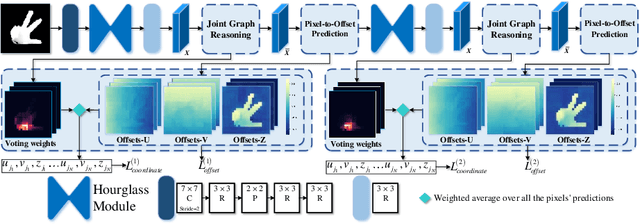
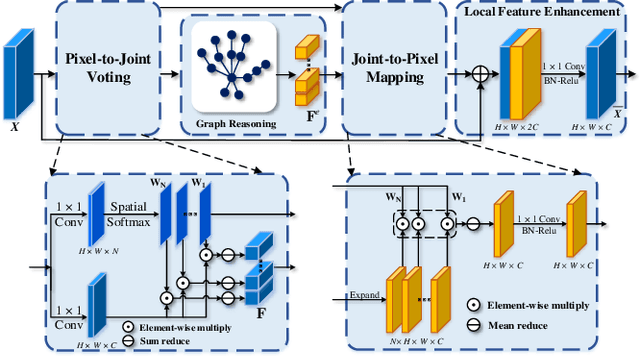
State-of-the-art single depth image-based 3D hand pose estimation methods are based on dense predictions, including voxel-to-voxel predictions, point-to-point regression, and pixel-wise estimations. Despite the good performance, those methods have a few issues in nature, such as the poor trade-off between accuracy and efficiency, and plain feature representation learning with local convolutions. In this paper, a novel pixel-wise prediction-based method is proposed to address the above issues. The key ideas are two-fold: a) explicitly modeling the dependencies among joints and the relations between the pixels and the joints for better local feature representation learning; b) unifying the dense pixel-wise offset predictions and direct joint regression for end-to-end training. Specifically, we first propose a graph convolutional network (GCN) based joint graph reasoning module to model the complex dependencies among joints and augment the representation capability of each pixel. Then we densely estimate all pixels' offsets to joints in both image plane and depth space and calculate the joints' positions by a weighted average over all pixels' predictions, totally discarding the complex postprocessing operations. The proposed model is implemented with an efficient 2D fully convolutional network (FCN) backbone and has only about 1.4M parameters. Extensive experiments on multiple 3D hand pose estimation benchmarks demonstrate that the proposed method achieves new state-of-the-art accuracy while running very efficiently with around a speed of 110fps on a single NVIDIA 1080Ti GPU.