 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongCat-Flash-Thinking-2601 Technical Report
Jan 23, 2026We introduce LongCat-Flash-Thinking-2601, a 560-billion-parameter open-source Mixture-of-Experts (MoE) reasoning model with superior agentic reasoning capability. LongCat-Flash-Thinking-2601 achieves state-of-the-art performance among open-source models on a wide range of agentic benchmarks, including agentic search, agentic tool use, and tool-integrated reasoning. Beyond benchmark performance, the model demonstrates strong generalization to complex tool interactions and robust behavior under noisy real-world environments. Its advanced capability stems from a unified training framework that combines domain-parallel expert training with subsequent fusion, together with an end-to-end co-design of data construction, environments, algorithms, and infrastructure spanning from pre-training to post-training. In particular, the model's strong generalization capability in complex tool-use are driven by our in-depth exploration of environment scaling and principled task construction. To optimize long-tailed, skewed generation and multi-turn agentic interactions, and to enable stable training across over 10,000 environments spanning more than 20 domains, we systematically extend our asynchronous reinforcement learning framework, DORA, for stable and efficient large-scale multi-environment training. Furthermore, recognizing that real-world tasks are inherently noisy, we conduct a systematic analysis and decomposition of real-world noise patterns, and design targeted training procedures to explicitly incorporate such imperfections into the training process, resulting in improved robustness for real-world applications. To further enhance performance on complex reasoning tasks, we introduce a Heavy Thinking mode that enables effective test-time scaling by jointly expanding reasoning depth and width through intensive parallel thinking.
Improving Implicit Feedback-Based Recommendation through Multi-Behavior Alignment
May 09, 2023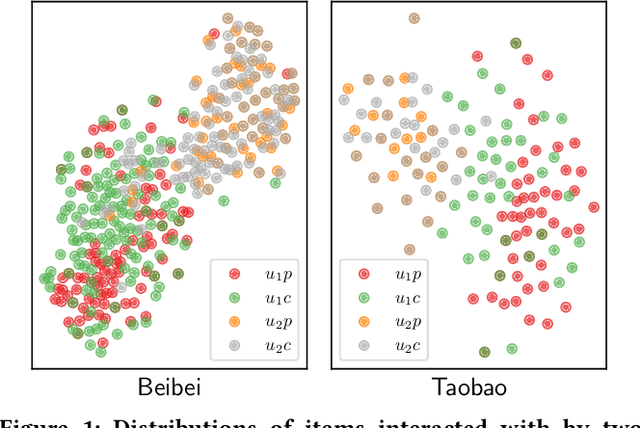
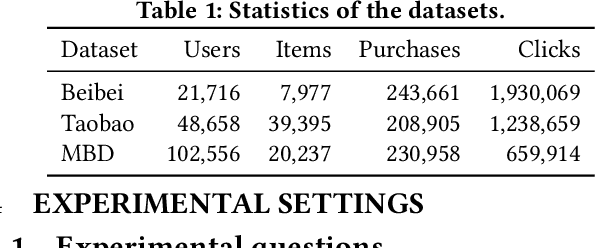
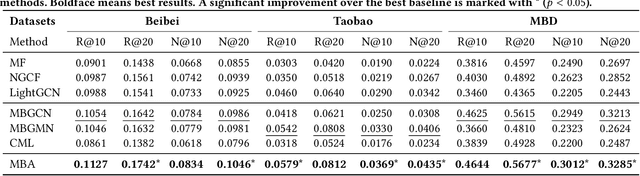
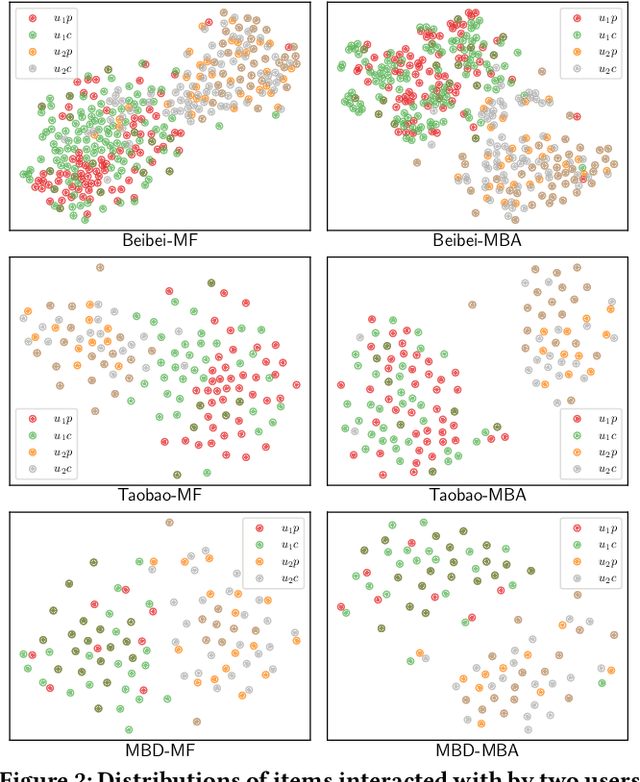
Recommender systems that learn from implicit feedback often use large volumes of a single type of implicit user feedback, such as clicks, to enhance the prediction of sparse target behavior such as purchases. Using multiple types of implicit user feedback for such target behavior prediction purposes is still an open question. Existing studies that attempted to learn from multiple types of user behavior often fail to: (i) learn universal and accurate user preferences from different behavioral data distributions, and (ii) overcome the noise and bias in observed implicit user feedback. To address the above problems, we propose multi-behavior alignment (MBA), a novel recommendation framework that learns from implicit feedback by using multiple types of behavioral data. We conjecture that multiple types of behavior from the same user (e.g., clicks and purchases) should reflect similar preferences of that user. To this end, we regard the underlying universal user preferences as a latent variable. The variable is inferred by maximizing the likelihood of multiple observed behavioral data distributions and, at the same time, minimizing the Kullback-Leibler divergence (KL-divergence) between user models learned from auxiliary behavior (such as clicks or views) and the target behavior separately. MBA infers universal user preferences from multi-behavior data and performs data denoising to enable effective knowledge transfer. We conduct experiments on three datasets, including a dataset collected from an operational e-commerce platform. Empirical results demonstrate the effectiveness of our proposed method in utilizing multiple types of behavioral data to enhance the prediction of the target behavior.