 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynaVid: Learning to Generate Highly Dynamic Videos using Synthetic Motion Data
Apr 02, 2026Despite recent progress, video diffusion models still struggle to synthesize realistic videos involving highly dynamic motions or requiring fine-grained motion controllability. A central limitation lies in the scarcity of such examples in commonly used training datasets. To address this, we introduce DynaVid, a video synthesis framework that leverages synthetic motion data in training, which is represented as optical flow and rendered using computer graphics pipelines. This approach offers two key advantages. First, synthetic motion offers diverse motion patterns and precise control signals that are difficult to obtain from real data. Second, unlike rendered videos with artificial appearances, rendered optical flow encodes only motion and is decoupled from appearance, thereby preventing models from reproducing the unnatural look of synthetic videos. Building on this idea, DynaVid adopts a two-stage generation framework: a motion generator first synthesizes motion, and then a motion-guided video generator produces video frames conditioned on that motion. This decoupled formulation enables the model to learn dynamic motion patterns from synthetic data while preserving visual realism from real-world videos. We validate our framework on two challenging scenarios, vigorous human motion generation and extreme camera motion control, where existing datasets are particularly limited. Extensive experiments demonstrate that DynaVid improves the realism and controllability in dynamic motion generation and camera motion control.
Subject-driven Video Generation via Disentangled Identity and Motion
Apr 23, 2025We propose to train a subject-driven customized video generation model through decoupling the subject-specific learning from temporal dynamics in zero-shot without additional tuning. A traditional method for video customization that is tuning-free often relies on large, annotated video datasets, which are computationally expensive and require extensive annotation. In contrast to the previous approach, we introduce the use of an image customization dataset directly on training video customization models, factorizing the video customization into two folds: (1) identity injection through image customization dataset and (2) temporal modeling preservation with a small set of unannotated videos through the image-to-video training method. Additionally, we employ random image token dropping with randomized image initialization during image-to-video fine-tuning to mitigate the copy-and-paste issue. To further enhance learning, we introduce stochastic switching during joint optimization of subject-specific and temporal features, mitigating catastrophic forgetting. Our method achieves strong subject consistency and scalability, outperforming existing video customization models in zero-shot settings, demonstrating the effectiveness of our framework.
FloVD: Optical Flow Meets Video Diffusion Model for Enhanced Camera-Controlled Video Synthesis
Feb 12, 2025This paper presents FloVD, a novel optical-flow-based video diffusion model for camera-controllable video generation. FloVD leverages optical flow maps to represent motions of the camera and moving objects. This approach offers two key benefits. Since optical flow can be directly estimated from videos, our approach allows for the use of arbitrary training videos without ground-truth camera parameters. Moreover, as background optical flow encodes 3D correlation across different viewpoints, our method enables detailed camera control by leveraging the background motion. To synthesize natural object motion while supporting detailed camera control, our framework adopts a two-stage video synthesis pipeline consisting of optical flow generation and flow-conditioned video synthesis. Extensive experiments demonstrate the superiority of our method over previous approaches in terms of accurate camera control and natural object motion synthesis.
Generalizable Novel-View Synthesis using a Stereo Camera
Apr 21, 2024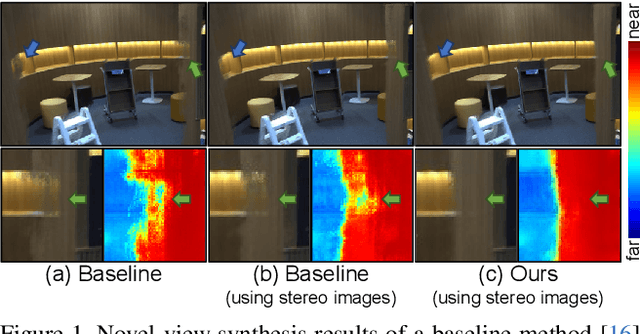
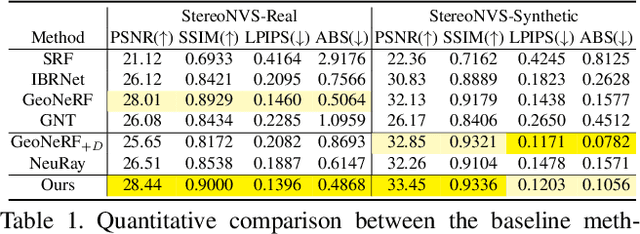
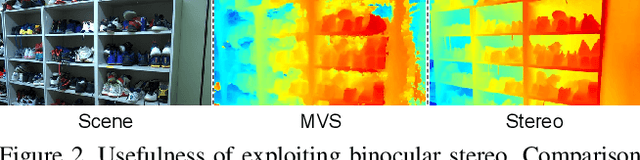
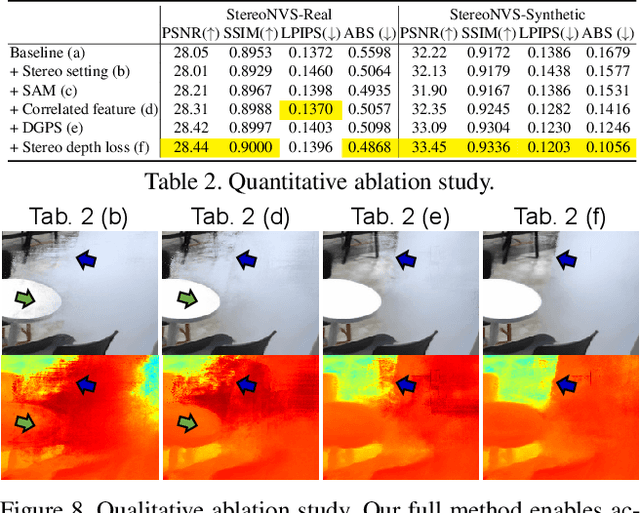
In this paper, we propose the first generalizable view synthesis approach that specifically targets multi-view stereo-camera images. Since recent stereo matching has demonstrated accurate geometry prediction, we introduce stereo matching into novel-view synthesis for high-quality geometry reconstruction. To this end, this paper proposes a novel framework, dubbed StereoNeRF, which integrates stereo matching into a NeRF-based generalizable view synthesis approach. StereoNeRF is equipped with three key components to effectively exploit stereo matching in novel-view synthesis: a stereo feature extractor, a depth-guided plane-sweeping, and a stereo depth loss. Moreover, we propose the StereoNVS dataset, the first multi-view dataset of stereo-camera images, encompassing a wide variety of both real and synthetic scenes. Our experimental results demonstrate that StereoNeRF surpasses previous approaches in generalizable view synthesis.
SideGAN: 3D-Aware Generative Model for Improved Side-View Image Synthesis
Sep 19, 2023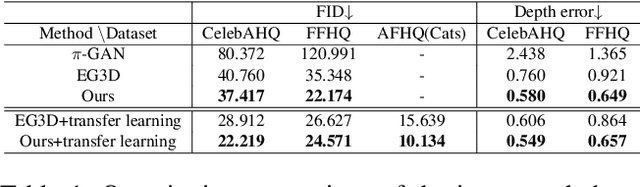
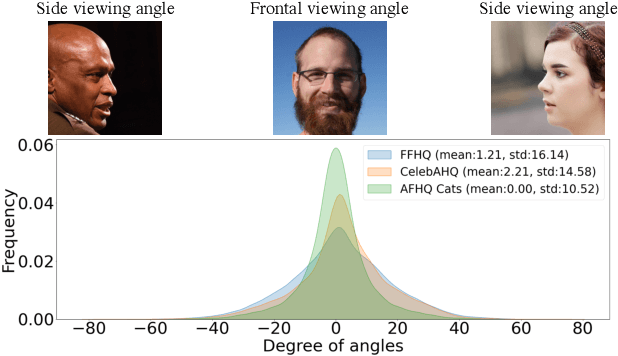
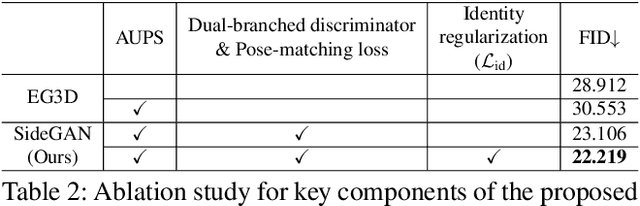
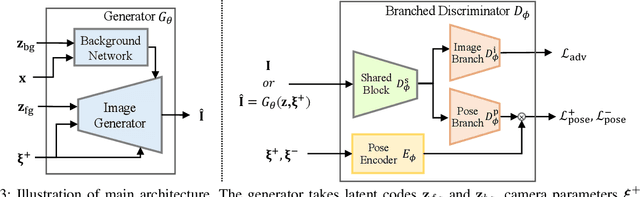
While recent 3D-aware generative models have shown photo-realistic image synthesis with multi-view consistency, the synthesized image quality degrades depending on the camera pose (e.g., a face with a blurry and noisy boundary at a side viewpoint). Such degradation is mainly caused by the difficulty of learning both pose consistency and photo-realism simultaneously from a dataset with heavily imbalanced poses. In this paper, we propose SideGAN, a novel 3D GAN training method to generate photo-realistic images irrespective of the camera pose, especially for faces of side-view angles. To ease the challenging problem of learning photo-realistic and pose-consistent image synthesis, we split the problem into two subproblems, each of which can be solved more easily. Specifically, we formulate the problem as a combination of two simple discrimination problems, one of which learns to discriminate whether a synthesized image looks real or not, and the other learns to discriminate whether a synthesized image agrees with the camera pose. Based on this, we propose a dual-branched discriminator with two discrimination branches. We also propose a pose-matching loss to learn the pose consistency of 3D GANs. In addition, we present a pose sampling strategy to increase learning opportunities for steep angles in a pose-imbalanced dataset. With extensive validation, we demonstrate that our approach enables 3D GANs to generate high-quality geometries and photo-realistic images irrespective of the camera pose.
Neural Spectro-polarimetric Fields
Jun 21, 2023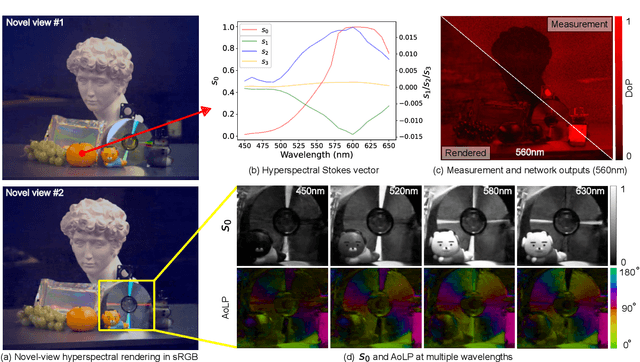
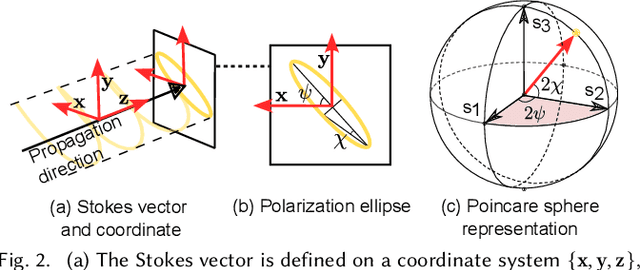
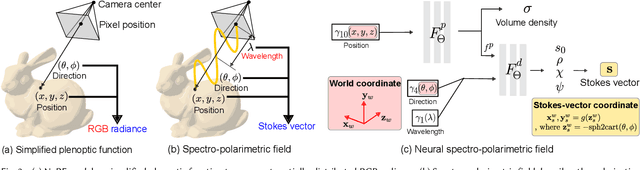
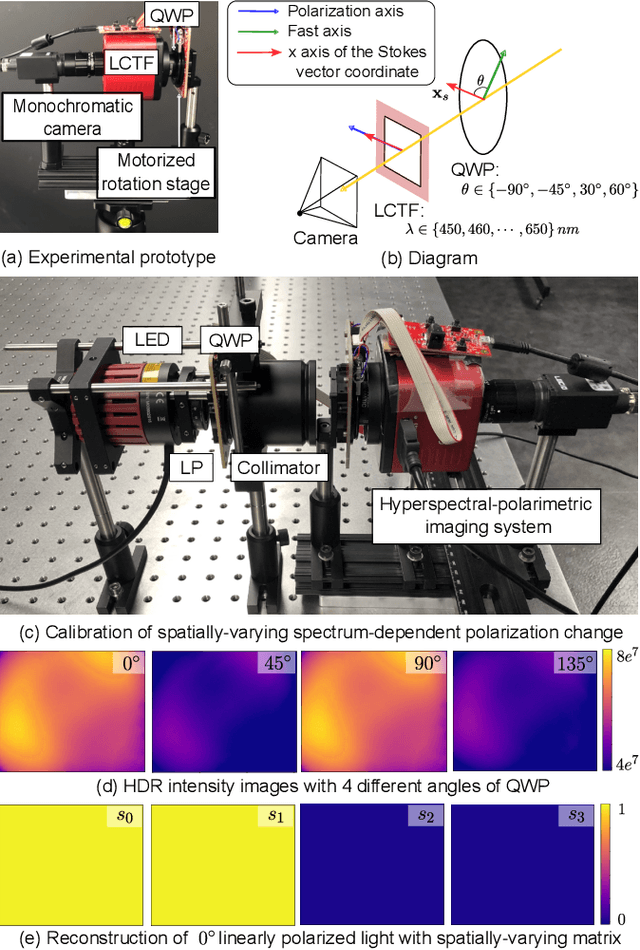
Modeling the spatial radiance distribution of light rays in a scene has been extensively explored for applications, including view synthesis. Spectrum and polarization, the wave properties of light, are often neglected due to their integration into three RGB spectral bands and their non-perceptibility to human vision. Despite this, these properties encompass substantial material and geometric information about a scene. In this work, we propose to model spectro-polarimetric fields, the spatial Stokes-vector distribution of any light ray at an arbitrary wavelength. We present Neural Spectro-polarimetric Fields (NeSpoF), a neural representation that models the physically-valid Stokes vector at given continuous variables of position, direction, and wavelength. NeSpoF manages inherently noisy raw measurements, showcases memory efficiency, and preserves physically vital signals, factors that are crucial for representing the high-dimensional signal of a spectro-polarimetric field. To validate NeSpoF, we introduce the first multi-view hyperspectral-polarimetric image dataset, comprised of both synthetic and real-world scenes. These were captured using our compact hyperspectral-polarimetric imaging system, which has been calibrated for robustness against system imperfections. We demonstrate the capabilities of NeSpoF on diverse scenes.
Dr.3D: Adapting 3D GANs to Artistic Drawings
Nov 30, 2022



While 3D GANs have recently demonstrated the high-quality synthesis of multi-view consistent images and 3D shapes, they are mainly restricted to photo-realistic human portraits. This paper aims to extend 3D GANs to a different, but meaningful visual form: artistic portrait drawings. However, extending existing 3D GANs to drawings is challenging due to the inevitable geometric ambiguity present in drawings. To tackle this, we present Dr.3D, a novel adaptation approach that adapts an existing 3D GAN to artistic drawings. Dr.3D is equipped with three novel components to handle the geometric ambiguity: a deformation-aware 3D synthesis network, an alternating adaptation of pose estimation and image synthesis, and geometric priors. Experiments show that our approach can successfully adapt 3D GANs to drawings and enable multi-view consistent semantic editing of drawings.