 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizable Novel-View Synthesis using a Stereo Camera
Apr 21, 2024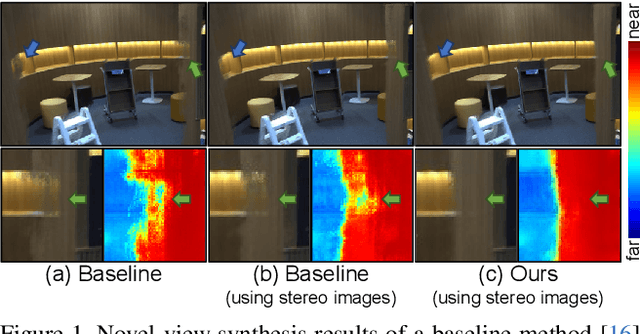
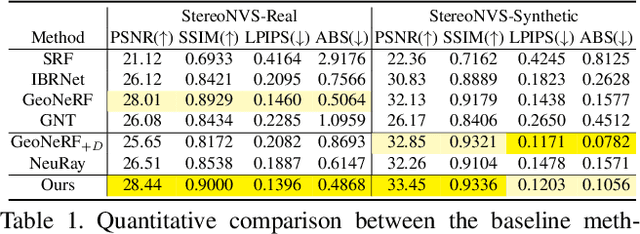
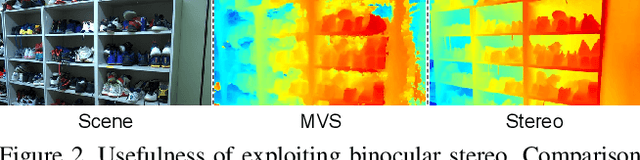
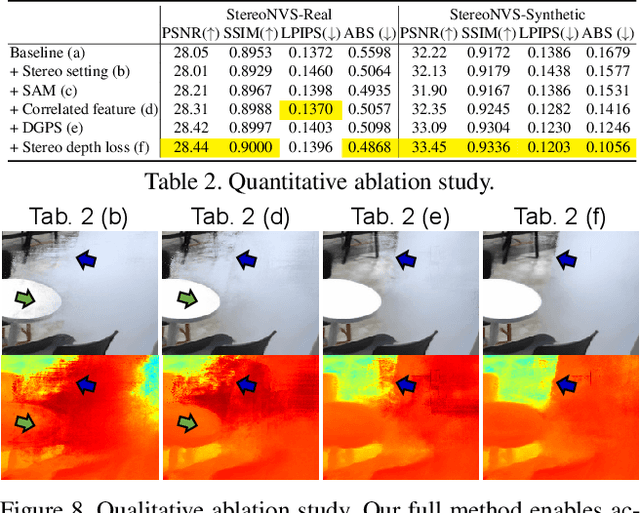
In this paper, we propose the first generalizable view synthesis approach that specifically targets multi-view stereo-camera images. Since recent stereo matching has demonstrated accurate geometry prediction, we introduce stereo matching into novel-view synthesis for high-quality geometry reconstruction. To this end, this paper proposes a novel framework, dubbed StereoNeRF, which integrates stereo matching into a NeRF-based generalizable view synthesis approach. StereoNeRF is equipped with three key components to effectively exploit stereo matching in novel-view synthesis: a stereo feature extractor, a depth-guided plane-sweeping, and a stereo depth loss. Moreover, we propose the StereoNVS dataset, the first multi-view dataset of stereo-camera images, encompassing a wide variety of both real and synthetic scenes. Our experimental results demonstrate that StereoNeRF surpasses previous approaches in generalizable view synthesis.
Human Pose Estimation in Extremely Low-Light Conditions
Mar 27, 2023We study human pose estimation in extremely low-light images. This task is challenging due to the difficulty of collecting real low-light images with accurate labels, and severely corrupted inputs that degrade prediction quality significantly. To address the first issue, we develop a dedicated camera system and build a new dataset of real low-light images with accurate pose labels. Thanks to our camera system, each low-light image in our dataset is coupled with an aligned well-lit image, which enables accurate pose labeling and is used as privileged information during training. We also propose a new model and a new training strategy that fully exploit the privileged information to learn representation insensitive to lighting conditions. Our method demonstrates outstanding performance on real extremely low light images, and extensive analyses validate that both of our model and dataset contribute to the success.