 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSMO: Open-Source Tactile Glove for Human-to-Robot Skill Transfer
Dec 09, 2025Human video demonstrations provide abundant training data for learning robot policies, but video alone cannot capture the rich contact signals critical for mastering manipulation. We introduce OSMO, an open-source wearable tactile glove designed for human-to-robot skill transfer. The glove features 12 three-axis tactile sensors across the fingertips and palm and is designed to be compatible with state-of-the-art hand-tracking methods for in-the-wild data collection. We demonstrate that a robot policy trained exclusively on human demonstrations collected with OSMO, without any real robot data, is capable of executing a challenging contact-rich manipulation task. By equipping both the human and the robot with the same glove, OSMO minimizes the visual and tactile embodiment gap, enabling the transfer of continuous shear and normal force feedback while avoiding the need for image inpainting or other vision-based force inference. On a real-world wiping task requiring sustained contact pressure, our tactile-aware policy achieves a 72% success rate, outperforming vision-only baselines by eliminating contact-related failure modes. We release complete hardware designs, firmware, and assembly instructions to support community adoption.
Decentralized Vision-Based Autonomous Aerial Wildlife Monitoring
Aug 20, 2025



Wildlife field operations demand efficient parallel deployment methods to identify and interact with specific individuals, enabling simultaneous collective behavioral analysis, and health and safety interventions. Previous robotics solutions approach the problem from the herd perspective, or are manually operated and limited in scale. We propose a decentralized vision-based multi-quadrotor system for wildlife monitoring that is scalable, low-bandwidth, and sensor-minimal (single onboard RGB camera). Our approach enables robust identification and tracking of large species in their natural habitat. We develop novel vision-based coordination and tracking algorithms designed for dynamic, unstructured environments without reliance on centralized communication or control. We validate our system through real-world experiments, demonstrating reliable deployment in diverse field conditions.
The Impact of Coreset Selection on Spurious Correlations and Group Robustness
Jul 15, 2025
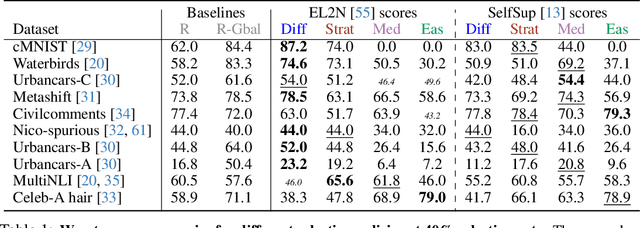

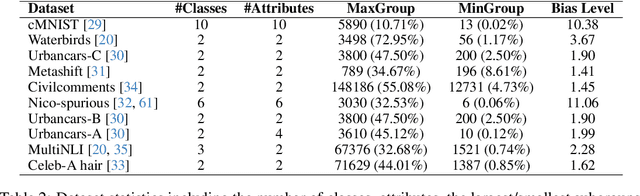
Coreset selection methods have shown promise in reducing the training data size while maintaining model performance for data-efficient machine learning. However, as many datasets suffer from biases that cause models to learn spurious correlations instead of causal features, it is important to understand whether and how dataset reduction methods may perpetuate, amplify, or mitigate these biases. In this work, we conduct the first comprehensive analysis of the implications of data selection on the spurious bias levels of the selected coresets and the robustness of downstream models trained on them. We use an extensive experimental setting spanning ten different spurious correlations benchmarks, five score metrics to characterize sample importance/ difficulty, and five data selection policies across a broad range of coreset sizes. Thereby, we unravel a series of nontrivial nuances in interactions between sample difficulty and bias alignment, as well as dataset bias and resultant model robustness. For example, we find that selecting coresets using embedding-based sample characterization scores runs a comparatively lower risk of inadvertently exacerbating bias than selecting using characterizations based on learning dynamics. Most importantly, our analysis reveals that although some coreset selection methods could achieve lower bias levels by prioritizing difficult samples, they do not reliably guarantee downstream robustness.
Approximating Global Contact-Implicit MPC via Sampling and Local Complementarity
May 19, 2025To achieve general-purpose dexterous manipulation, robots must rapidly devise and execute contact-rich behaviors. Existing model-based controllers are incapable of globally optimizing in real-time over the exponential number of possible contact sequences. Instead, recent progress in contact-implicit control has leveraged simpler models that, while still hybrid, make local approximations. However, the use of local models inherently limits the controller to only exploit nearby interactions, potentially requiring intervention to richly explore the space of possible contacts. We present a novel approach which leverages the strengths of local complementarity-based control in combination with low-dimensional, but global, sampling of possible end-effector locations. Our key insight is to consider a contact-free stage preceding a contact-rich stage at every control loop. Our algorithm, in parallel, samples end effector locations to which the contact-free stage can move the robot, then considers the cost predicted by contact-rich MPC local to each sampled location. The result is a globally-informed, contact-implicit controller capable of real-time dexterous manipulation. We demonstrate our controller on precise, non-prehensile manipulation of non-convex objects using a Franka Panda arm. Project page: https://approximating-global-ci-mpc.github.io
What is Dataset Distillation Learning?
Jun 06, 2024



Dataset distillation has emerged as a strategy to overcome the hurdles associated with large datasets by learning a compact set of synthetic data that retains essential information from the original dataset. While distilled data can be used to train high performing models, little is understood about how the information is stored. In this study, we posit and answer three questions about the behavior, representativeness, and point-wise information content of distilled data. We reveal distilled data cannot serve as a substitute for real data during training outside the standard evaluation setting for dataset distillation. Additionally, the distillation process retains high task performance by compressing information related to the early training dynamics of real models. Finally, we provide an framework for interpreting distilled data and reveal that individual distilled data points contain meaningful semantic information. This investigation sheds light on the intricate nature of distilled data, providing a better understanding on how they can be effectively utilized.
Dynamic On-Palm Manipulation via Controlled Sliding
May 14, 2024



Non-prehensile manipulation enables fast interactions with objects by circumventing the need to grasp and ungrasp as well as handling objects that cannot be grasped through force closure. Current approaches to non-prehensile manipulation focus on static contacts, avoiding the underactuation that comes with sliding. However, the ability to control sliding contact, essentially removing the no-slip constraint, opens up new possibilities in dynamic manipulation. In this paper, we explore a challenging dynamic non-prehensile manipulation task that requires the consideration of the full spectrum of hybrid contact modes. We leverage recent methods in contact-implicit MPC to handle the multi-modal planning aspect of the task. We demonstrate, with careful consideration of integration between the simple model used for MPC and the low-level tracking controller, how contact-implicit MPC can be adapted to dynamic tasks. Surprisingly, despite the known inaccuracies of frictional rigid contact models, our method is able to react to these inaccuracies while still quickly performing the task. Moreover, we do not use common aids such as reference trajectories or motion primitives, highlighting the generality of our approach. To the best of our knowledge, this is the first application of contact-implicit MPC to a dynamic manipulation task in three dimensions.
SUNDIAL: 3D Satellite Understanding through Direct, Ambient, and Complex Lighting Decomposition
Dec 24, 2023



3D modeling from satellite imagery is essential in areas of environmental science, urban planning, agriculture, and disaster response. However, traditional 3D modeling techniques face unique challenges in the remote sensing context, including limited multi-view baselines over extensive regions, varying direct, ambient, and complex illumination conditions, and time-varying scene changes across captures. In this work, we introduce SUNDIAL, a comprehensive approach to 3D reconstruction of satellite imagery using neural radiance fields. We jointly learn satellite scene geometry, illumination components, and sun direction in this single-model approach, and propose a secondary shadow ray casting technique to 1) improve scene geometry using oblique sun angles to render shadows, 2) enable physically-based disentanglement of scene albedo and illumination, and 3) determine the components of illumination from direct, ambient (sky), and complex sources. To achieve this, we incorporate lighting cues and geometric priors from remote sensing literature in a neural rendering approach, modeling physical properties of satellite scenes such as shadows, scattered sky illumination, and complex illumination and shading of vegetation and water. We evaluate the performance of SUNDIAL against existing NeRF-based techniques for satellite scene modeling and demonstrate improved scene and lighting disentanglement, novel view and lighting rendering, and geometry and sun direction estimation on challenging scenes with small baselines, sparse inputs, and variable illumination.
NAC-TCN: Temporal Convolutional Networks with Causal Dilated Neighborhood Attention for Emotion Understanding
Dec 12, 2023



In the task of emotion recognition from videos, a key improvement has been to focus on emotions over time rather than a single frame. There are many architectures to address this task such as GRUs, LSTMs, Self-Attention, Transformers, and Temporal Convolutional Networks (TCNs). However, these methods suffer from high memory usage, large amounts of operations, or poor gradients. We propose a method known as Neighborhood Attention with Convolutions TCN (NAC-TCN) which incorporates the benefits of attention and Temporal Convolutional Networks while ensuring that causal relationships are understood which results in a reduction in computation and memory cost. We accomplish this by introducing a causal version of Dilated Neighborhood Attention while incorporating it with convolutions. Our model achieves comparable, better, or state-of-the-art performance over TCNs, TCAN, LSTMs, and GRUs while requiring fewer parameters on standard emotion recognition datasets. We publish our code online for easy reproducibility and use in other projects.
ImageNet-OOD: Deciphering Modern Out-of-Distribution Detection Algorithms
Oct 03, 2023
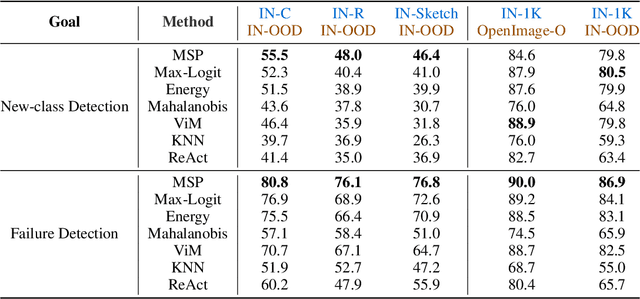
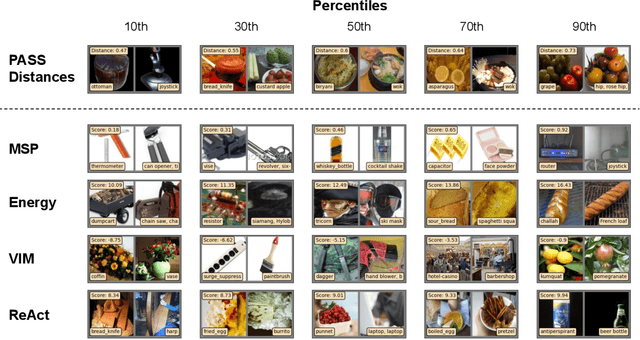

The task of out-of-distribution (OOD) detection is notoriously ill-defined. Earlier works focused on new-class detection, aiming to identify label-altering data distribution shifts, also known as "semantic shift." However, recent works argue for a focus on failure detection, expanding the OOD evaluation framework to account for label-preserving data distribution shifts, also known as "covariate shift." Intriguingly, under this new framework, complex OOD detectors that were previously considered state-of-the-art now perform similarly to, or even worse than the simple maximum softmax probability baseline. This raises the question: what are the latest OOD detectors actually detecting? Deciphering the behavior of OOD detection algorithms requires evaluation datasets that decouples semantic shift and covariate shift. To aid our investigations, we present ImageNet-OOD, a clean semantic shift dataset that minimizes the interference of covariate shift. Through comprehensive experiments, we show that OOD detectors are more sensitive to covariate shift than to semantic shift, and the benefits of recent OOD detection algorithms on semantic shift detection is minimal. Our dataset and analyses provide important insights for guiding the design of future OOD detectors.
Confidence-Calibrated Ensemble Dense Phrase Retrieval
Jun 28, 2023In this paper, we consider the extent to which the transformer-based Dense Passage Retrieval (DPR) algorithm, developed by (Karpukhin et. al. 2020), can be optimized without further pre-training. Our method involves two particular insights: we apply the DPR context encoder at various phrase lengths (e.g. one-sentence versus five-sentence segments), and we take a confidence-calibrated ensemble prediction over all of these different segmentations. This somewhat exhaustive approach achieves start-of-the-art results on benchmark datasets such as Google NQ and SQuAD. We also apply our method to domain-specific datasets, and the results suggest how different granularities are optimal for different domains