 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceptive Mixed-Integer Footstep Control for Underactuated Bipedal Walking on Rough Terrain
Jan 31, 2025Traversing rough terrain requires dynamic bipeds to stabilize themselves through foot placement without stepping in unsafe areas. Planning these footsteps online is challenging given non-convexity of the safe terrain, and imperfect perception and state estimation. This paper addresses these challenges with a full-stack perception and control system for achieving underactuated walking on discontinuous terrain. First, we develop model-predictive footstep control (MPFC), a single mixed-integer quadratic program which assumes a convex polygon terrain decomposition to optimize over discrete foothold choice, footstep position, ankle torque, template dynamics, and footstep timing at over 100 Hz. We then propose a novel approach for generating convex polygon terrain decompositions online. Our perception stack decouples safe-terrain classification from fitting planar polygons, generating a temporally consistent terrain segmentation in real time using a single CPU thread. We demonstrate the performance of our perception and control stack through outdoor experiments with the underactuated biped Cassie, achieving state of the art perceptive bipedal walking on discontinuous terrain. Supplemental Video: https://youtu.be/eCOD1bMi638
Bipedal Walking on Constrained Footholds with MPC Footstep Control
Sep 14, 2023Bipedal robots promise the ability to traverse rough terrain quickly and efficiently, and indeed, humanoid robots can now use strong ankles and careful foot placement to traverse discontinuous terrain. However, more agile underactuated bipeds have small feet and weak ankles, and must constantly adjust their planned footstep position to maintain balance. We introduce a new model-predictive footstep controller which jointly optimizes over the robot's discrete choice of stepping surface, impending footstep position sequence, ankle torque in the sagittal plane, and center of mass trajectory, to track a velocity command. The controller is formulated as a single Mixed Integer Quadratic Program (MIQP) which is solved at 50-200 Hz, depending on terrain complexity. We implement a state of the art real-time elevation mapping and convex terrain decomposition framework to inform the controller of its surroundings in the form on convex polygons representing steppable terrain. We investigate the capabilities and challenges of our approach through hardware experiments on the underactuated biped Cassie.
Validating Robotics Simulators on Real World Impacts
Oct 01, 2021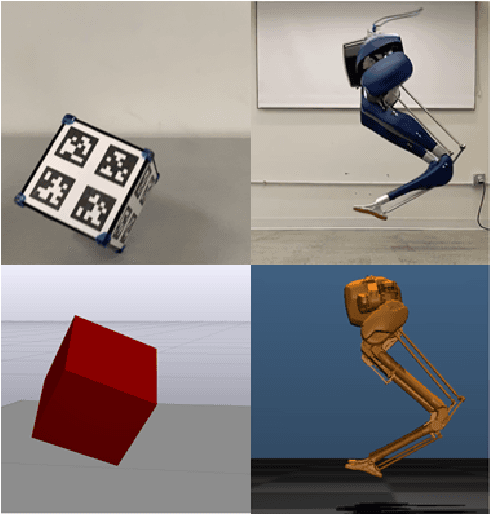
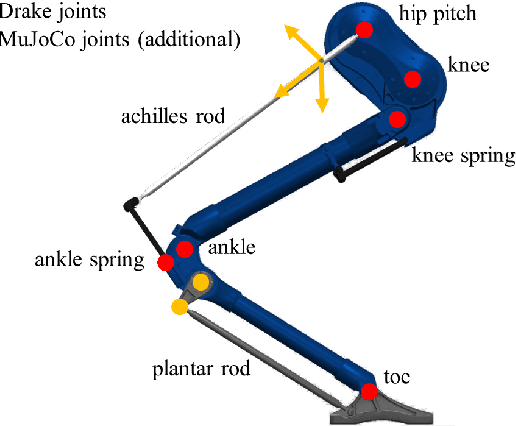
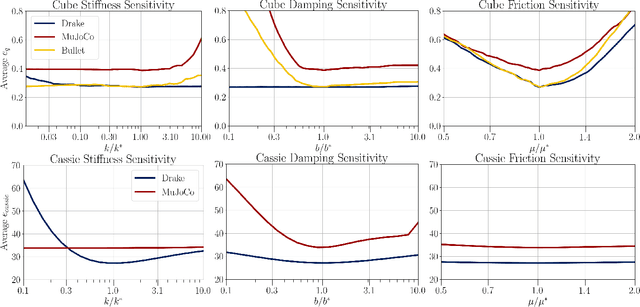
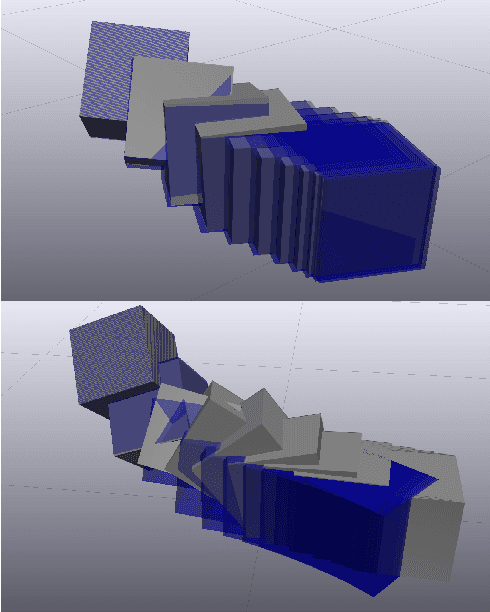
A realistic simulation environment is an essential tool in every roboticist's toolkit, with uses ranging from planning and control to training policies with reinforcement learning. Despite the centrality of simulation in modern robotics, little work has been done to compare the performance of robotics simulators against real-world data, especially for scenarios involving dynamic motions with high speed impact events. Handling dynamic contact is the computational bottleneck for most simulations, and thus the modeling and algorithmic choices surrounding impacts and friction form the largest distinctions between popular tools. Here, we evaluate the ability of several simulators to reproduce real-world trajectories involving impacts. Using experimental data, we identify system-specific contact parameters of popular simulators Drake, MuJoCo, and Bullet, analyzing the effects of modeling choices around these parameters. For the simple example of a cube tossed onto a table, simulators capture inelastic impacts well while failing to capture elastic impacts. For the higher-dimensional case of a Cassie biped landing from a jump, the simulators capture the bulk motion well but the accuracy is limited by numerous model differences between the real robot and the simulators.