 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere to Touch, How to Contact: Hierarchical RL-MPC Framework for Geometry-Aware Long-Horizon Dexterous Manipulation
Jan 16, 2026A key challenge in contact-rich dexterous manipulation is the need to jointly reason over geometry, kinematic constraints, and intricate, nonsmooth contact dynamics. End-to-end visuomotor policies bypass this structure, but often require large amounts of data, transfer poorly from simulation to reality, and generalize weakly across tasks/embodiments. We address those limitations by leveraging a simple insight: dexterous manipulation is inherently hierarchical - at a high level, a robot decides where to touch (geometry) and move the object (kinematics); at a low level it determines how to realize that plan through contact dynamics. Building on this insight, we propose a hierarchical RL--MPC framework in which a high-level reinforcement learning (RL) policy predicts a contact intention, a novel object-centric interface that specifies (i) an object-surface contact location and (ii) a post-contact object-level subgoal pose. Conditioned on this contact intention, a low-level contact-implicit model predictive control (MPC) optimizes local contact modes and replans with contact dynamics to generate robot actions that robustly drive the object toward each subgoal. We evaluate the framework on non-prehensile tasks, including geometry-generalized pushing and object 3D reorientation. It achieves near-100% success with substantially reduced data (10x less than end-to-end baselines), highly robust performance, and zero-shot sim-to-real transfer.
Approximating Global Contact-Implicit MPC via Sampling and Local Complementarity
May 19, 2025To achieve general-purpose dexterous manipulation, robots must rapidly devise and execute contact-rich behaviors. Existing model-based controllers are incapable of globally optimizing in real-time over the exponential number of possible contact sequences. Instead, recent progress in contact-implicit control has leveraged simpler models that, while still hybrid, make local approximations. However, the use of local models inherently limits the controller to only exploit nearby interactions, potentially requiring intervention to richly explore the space of possible contacts. We present a novel approach which leverages the strengths of local complementarity-based control in combination with low-dimensional, but global, sampling of possible end-effector locations. Our key insight is to consider a contact-free stage preceding a contact-rich stage at every control loop. Our algorithm, in parallel, samples end effector locations to which the contact-free stage can move the robot, then considers the cost predicted by contact-rich MPC local to each sampled location. The result is a globally-informed, contact-implicit controller capable of real-time dexterous manipulation. We demonstrate our controller on precise, non-prehensile manipulation of non-convex objects using a Franka Panda arm. Project page: https://approximating-global-ci-mpc.github.io
Vysics: Object Reconstruction Under Occlusion by Fusing Vision and Contact-Rich Physics
Apr 25, 2025



We introduce Vysics, a vision-and-physics framework for a robot to build an expressive geometry and dynamics model of a single rigid body, using a seconds-long RGBD video and the robot's proprioception. While the computer vision community has built powerful visual 3D perception algorithms, cluttered environments with heavy occlusions can limit the visibility of objects of interest. However, observed motion of partially occluded objects can imply physical interactions took place, such as contact with a robot or the environment. These inferred contacts can supplement the visible geometry with "physible geometry," which best explains the observed object motion through physics. Vysics uses a vision-based tracking and reconstruction method, BundleSDF, to estimate the trajectory and the visible geometry from an RGBD video, and an odometry-based model learning method, Physics Learning Library (PLL), to infer the "physible" geometry from the trajectory through implicit contact dynamics optimization. The visible and "physible" geometries jointly factor into optimizing a signed distance function (SDF) to represent the object shape. Vysics does not require pretraining, nor tactile or force sensors. Compared with vision-only methods, Vysics yields object models with higher geometric accuracy and better dynamics prediction in experiments where the object interacts with the robot and the environment under heavy occlusion. Project page: https://vysics-vision-and-physics.github.io/
Perceptive Mixed-Integer Footstep Control for Underactuated Bipedal Walking on Rough Terrain
Jan 31, 2025Traversing rough terrain requires dynamic bipeds to stabilize themselves through foot placement without stepping in unsafe areas. Planning these footsteps online is challenging given non-convexity of the safe terrain, and imperfect perception and state estimation. This paper addresses these challenges with a full-stack perception and control system for achieving underactuated walking on discontinuous terrain. First, we develop model-predictive footstep control (MPFC), a single mixed-integer quadratic program which assumes a convex polygon terrain decomposition to optimize over discrete foothold choice, footstep position, ankle torque, template dynamics, and footstep timing at over 100 Hz. We then propose a novel approach for generating convex polygon terrain decompositions online. Our perception stack decouples safe-terrain classification from fitting planar polygons, generating a temporally consistent terrain segmentation in real time using a single CPU thread. We demonstrate the performance of our perception and control stack through outdoor experiments with the underactuated biped Cassie, achieving state of the art perceptive bipedal walking on discontinuous terrain. Supplemental Video: https://youtu.be/eCOD1bMi638
Dynamic On-Palm Manipulation via Controlled Sliding
May 14, 2024



Non-prehensile manipulation enables fast interactions with objects by circumventing the need to grasp and ungrasp as well as handling objects that cannot be grasped through force closure. Current approaches to non-prehensile manipulation focus on static contacts, avoiding the underactuation that comes with sliding. However, the ability to control sliding contact, essentially removing the no-slip constraint, opens up new possibilities in dynamic manipulation. In this paper, we explore a challenging dynamic non-prehensile manipulation task that requires the consideration of the full spectrum of hybrid contact modes. We leverage recent methods in contact-implicit MPC to handle the multi-modal planning aspect of the task. We demonstrate, with careful consideration of integration between the simple model used for MPC and the low-level tracking controller, how contact-implicit MPC can be adapted to dynamic tasks. Surprisingly, despite the known inaccuracies of frictional rigid contact models, our method is able to react to these inaccuracies while still quickly performing the task. Moreover, we do not use common aids such as reference trajectories or motion primitives, highlighting the generality of our approach. To the best of our knowledge, this is the first application of contact-implicit MPC to a dynamic manipulation task in three dimensions.
Simultaneous Learning of Contact and Continuous Dynamics
Oct 18, 2023Robotic manipulation can greatly benefit from the data efficiency, robustness, and predictability of model-based methods if robots can quickly generate models of novel objects they encounter. This is especially difficult when effects like complex joint friction lack clear first-principles models and are usually ignored by physics simulators. Further, numerically-stiff contact dynamics can make common model-building approaches struggle. We propose a method to simultaneously learn contact and continuous dynamics of a novel, possibly multi-link object by observing its motion through contact-rich trajectories. We formulate a system identification process with a loss that infers unmeasured contact forces, penalizing their violation of physical constraints and laws of motion given current model parameters. Our loss is unlike prediction-based losses used in differentiable simulation. Using a new dataset of real articulated object trajectories and an existing cube toss dataset, our method outperforms differentiable simulation and end-to-end alternatives with more data efficiency. See our project page for code, datasets, and media: https://sites.google.com/view/continuous-contact-nets/home
Reinforcement Learning for Reduced-order Models of Legged Robots
Oct 15, 2023



Model-based approaches for planning and control for bipedal locomotion have a long history of success. It can provide stability and safety guarantees while being effective in accomplishing many locomotion tasks. Model-free reinforcement learning, on the other hand, has gained much popularity in recent years due to computational advancements. It can achieve high performance in specific tasks, but it lacks physical interpretability and flexibility in re-purposing the policy for a different set of tasks. For instance, we can initially train a neural network (NN) policy using velocity commands as inputs. However, to handle new task commands like desired hand or footstep locations at a desired walking velocity, we must retrain a new NN policy. In this work, we attempt to bridge the gap between these two bodies of work on a bipedal platform. We formulate a model-based reinforcement learning problem to learn a reduced-order model (ROM) within a model predictive control (MPC). Results show a 49% improvement in viable task region size and a 21% reduction in motor torque cost. All videos and code are available at https://sites.google.com/view/ymchen/research/rl-for-roms.
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Oct 15, 2023
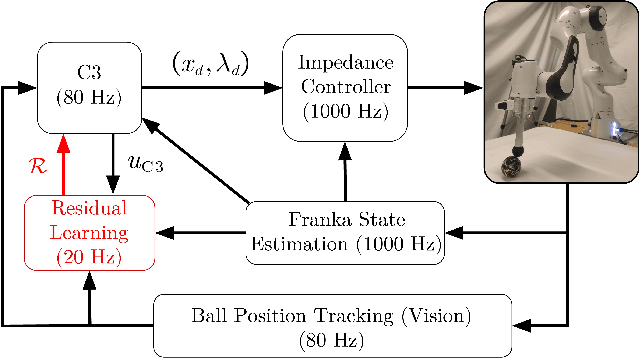
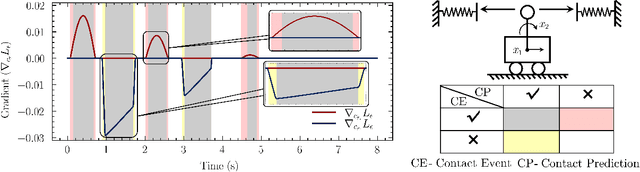
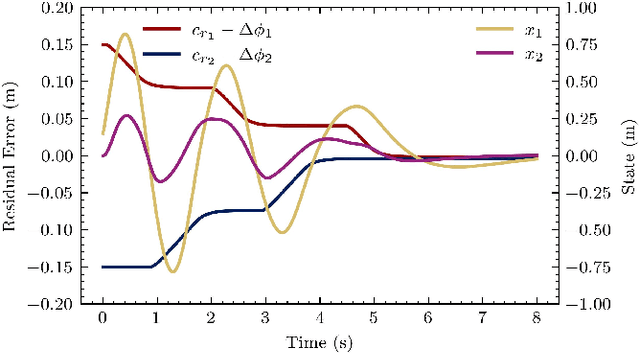
The hybrid nature of multi-contact robotic systems, due to making and breaking contact with the environment, creates significant challenges for high-quality control. Existing model-based methods typically rely on either good prior knowledge of the multi-contact model or require significant offline model tuning effort, thus resulting in low adaptability and robustness. In this paper, we propose a real-time adaptive multi-contact model predictive control framework, which enables online adaption of the hybrid multi-contact model and continuous improvement of the control performance for contact-rich tasks. This framework includes an adaption module, which continuously learns a residual of the hybrid model to minimize the gap between the prior model and reality, and a real-time multi-contact MPC controller. We demonstrated the effectiveness of the framework in synthetic examples, and applied it on hardware to solve contact-rich manipulation tasks, where a robot uses its end-effector to roll different unknown objects on a table to track given paths. The hardware experiments show that with a rough prior model, the multi-contact MPC controller adapts itself on-the-fly with an adaption rate around 20 Hz and successfully manipulates previously unknown objects with non-smooth surface geometries.
Enhancing Task Performance of Learned Simplified Models via Reinforcement Learning
Oct 15, 2023In contact-rich tasks, the hybrid, multi-modal nature of contact dynamics poses great challenges in model representation, planning, and control. Recent efforts have attempted to address these challenges via data-driven methods, learning dynamical models in combination with model predictive control. Those methods, while effective, rely solely on minimizing forward prediction errors to hope for better task performance with MPC controllers. This weak correlation can result in data inefficiency as well as limitations to overall performance. In response, we propose a novel strategy: using a policy gradient algorithm to find a simplified dynamics model that explicitly maximizes task performance. Specifically, we parameterize the stochastic policy as the perturbed output of the MPC controller, thus, the learned model representation can directly associate with the policy or task performance. We apply the proposed method to contact-rich tasks where a three-fingered robotic hand manipulates previously unknown objects. Our method significantly enhances task success rate by up to 15% in manipulating diverse objects compared to the existing method while sustaining data efficiency. Our method can solve some tasks with success rates of 70% or higher using under 30 minutes of data. All videos and codes are available at https://sites.google.com/view/lcs-rl.
Instance-Agnostic Geometry and Contact Dynamics Learning
Sep 28, 2023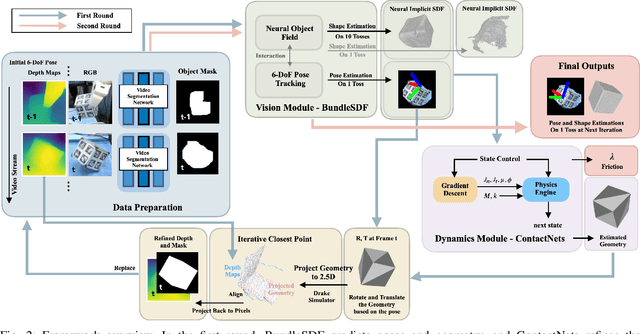
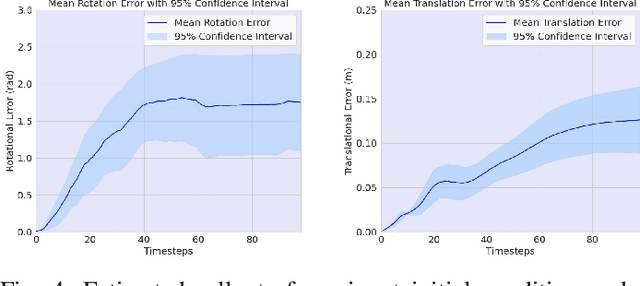
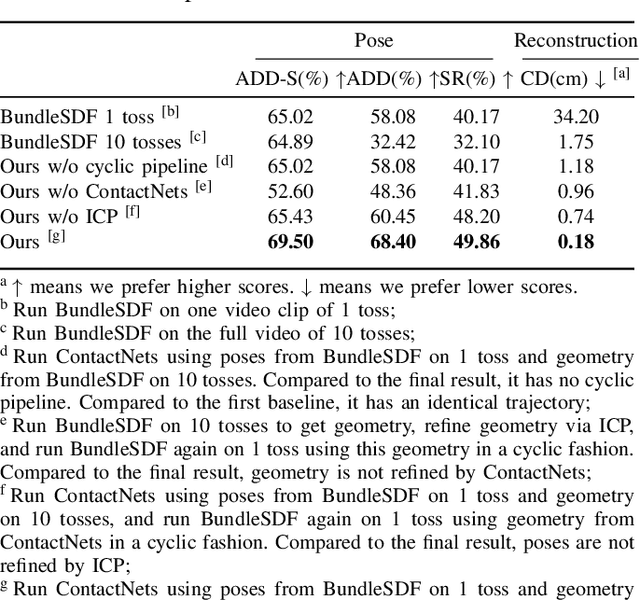
This work presents an instance-agnostic learning framework that fuses vision with dynamics to simultaneously learn shape, pose trajectories, and physical properties via the use of geometry as a shared representation. Unlike many contact learning approaches that assume motion capture input and a known shape prior for the collision model, our proposed framework learns an object's geometric and dynamic properties from RGBD video, without requiring either category-level or instance-level shape priors. We integrate a vision system, BundleSDF, with a dynamics system, ContactNets, and propose a cyclic training pipeline to use the output from the dynamics module to refine the poses and the geometry from the vision module, using perspective reprojection. Experiments demonstrate our framework's ability to learn the geometry and dynamics of rigid and convex objects and improve upon the current tracking framework.