 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComFree-Sim: A GPU-Parallelized Analytical Contact Physics Engine for Scalable Contact-Rich Robotics Simulation and Control
Mar 12, 2026Physics simulation for contact-rich robotics is often bottlenecked by contact resolution: mainstream engines enforce non-penetration and Coulomb friction via complementarity constraints or constrained optimization, requiring per-step iterative solves whose cost grows superlinearly with contact density. We present ComFree-Sim, a GPU-parallelized analytical contact physics engine built on complementarity-free contact modeling. ComFree-Sim computes contact impulses in closed form via an impedance-style prediction--correction update in the dual cone of Coulomb friction. Contact computation decouples across contact pairs and becomes separable across cone facets, mapping naturally to GPU kernels and yielding near-linear runtime scaling with the number of contacts. We further extend the formulation to a unified 6D contact model capturing tangential, torsional, and rolling friction, and introduce a practical dual-cone impedance heuristic. ComFree-Sim is implemented in Warp and exposed through a MuJoCo-compatible interface as a drop-in backend alternative to MuJoCo Warp (MJWarp). Experiments benchmark penetration, friction behaviors, stability, and simulation runtime scaling against MJWarp, demonstrating near-linear scaling and 2--3 times higher throughput in dense contact scenes with comparable physical fidelity. We deploy ComFree-Sim in real-time MPC for in-hand dexterous manipulation on a real-world multi-fingered LEAP hand and in dynamics-aware motion retargeting, demonstrating that low-latency simulation yields higher closed-loop success rates and enables practical high-frequency control in contact-rich tasks.
Simulation-Ready Cluttered Scene Estimation via Physics-aware Joint Shape and Pose Optimization
Feb 23, 2026Estimating simulation-ready scenes from real-world observations is crucial for downstream planning and policy learning tasks. Regretfully, existing methods struggle in cluttered environments, often exhibiting prohibitive computational cost, poor robustness, and restricted generality when scaling to multiple interacting objects. We propose a unified optimization-based formulation for real-to-sim scene estimation that jointly recovers the shapes and poses of multiple rigid objects under physical constraints. Our method is built on two key technical innovations. First, we leverage the recently introduced shape-differentiable contact model, whose global differentiability permits joint optimization over object geometry and pose while modeling inter-object contacts. Second, we exploit the structured sparsity of the augmented Lagrangian Hessian to derive an efficient linear system solver whose computational cost scales favorably with scene complexity. Building on this formulation, we develop an end-to-end real-to-sim scene estimation pipeline that integrates learning-based object initialization, physics-constrained joint shape-pose optimization, and differentiable texture refinement. Experiments on cluttered scenes with up to 5 objects and 22 convex hulls demonstrate that our approach robustly reconstructs physically valid, simulation-ready object shapes and poses.
OVOR: OnePrompt with Virtual Outlier Regularization for Rehearsal-Free Class-Incremental Learning
Feb 06, 2024Recent works have shown that by using large pre-trained models along with learnable prompts, rehearsal-free methods for class-incremental learning (CIL) settings can achieve superior performance to prominent rehearsal-based ones. Rehearsal-free CIL methods struggle with distinguishing classes from different tasks, as those are not trained together. In this work we propose a regularization method based on virtual outliers to tighten decision boundaries of the classifier, such that confusion of classes among different tasks is mitigated. Recent prompt-based methods often require a pool of task-specific prompts, in order to prevent overwriting knowledge of previous tasks with that of the new task, leading to extra computation in querying and composing an appropriate prompt from the pool. This additional cost can be eliminated, without sacrificing accuracy, as we reveal in the paper. We illustrate that a simplified prompt-based method can achieve results comparable to previous state-of-the-art (SOTA) methods equipped with a prompt pool, using much less learnable parameters and lower inference cost. Our regularization method has demonstrated its compatibility with different prompt-based methods, boosting those previous SOTA rehearsal-free CIL methods' accuracy on the ImageNet-R and CIFAR-100 benchmarks. Our source code is available at https://github.com/jpmorganchase/ovor.
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Oct 15, 2023
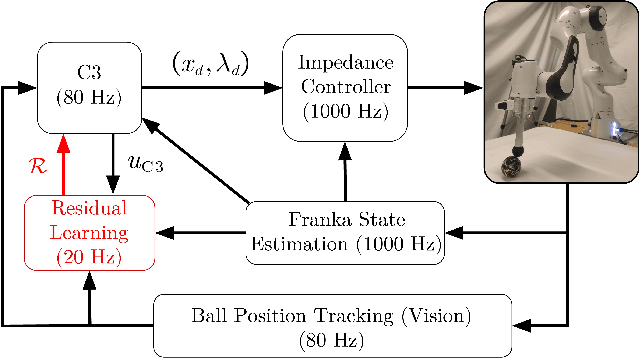
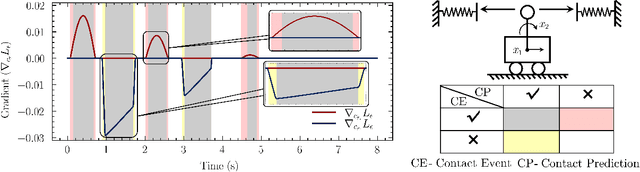
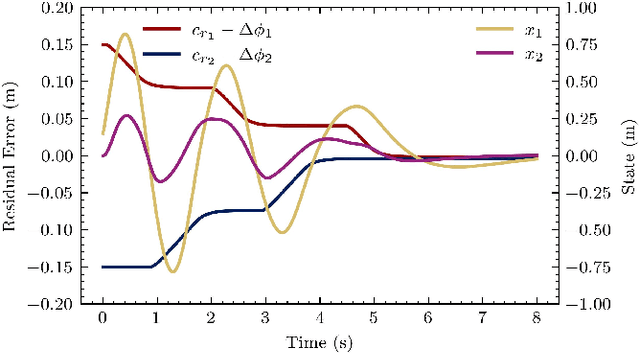
The hybrid nature of multi-contact robotic systems, due to making and breaking contact with the environment, creates significant challenges for high-quality control. Existing model-based methods typically rely on either good prior knowledge of the multi-contact model or require significant offline model tuning effort, thus resulting in low adaptability and robustness. In this paper, we propose a real-time adaptive multi-contact model predictive control framework, which enables online adaption of the hybrid multi-contact model and continuous improvement of the control performance for contact-rich tasks. This framework includes an adaption module, which continuously learns a residual of the hybrid model to minimize the gap between the prior model and reality, and a real-time multi-contact MPC controller. We demonstrated the effectiveness of the framework in synthetic examples, and applied it on hardware to solve contact-rich manipulation tasks, where a robot uses its end-effector to roll different unknown objects on a table to track given paths. The hardware experiments show that with a rough prior model, the multi-contact MPC controller adapts itself on-the-fly with an adaption rate around 20 Hz and successfully manipulates previously unknown objects with non-smooth surface geometries.
Improving Cross-Lingual Reading Comprehension with Self-Training
May 08, 2021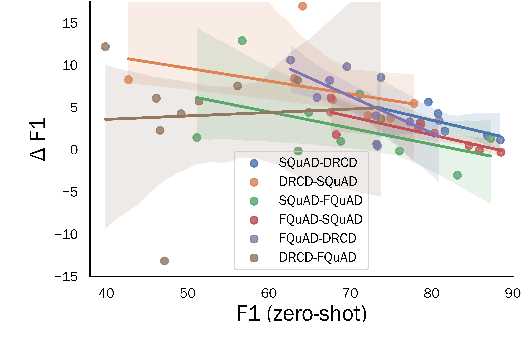

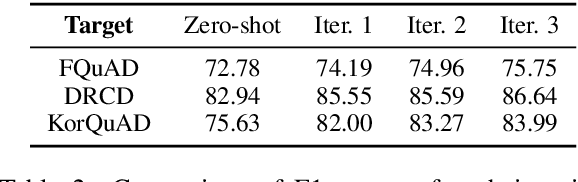
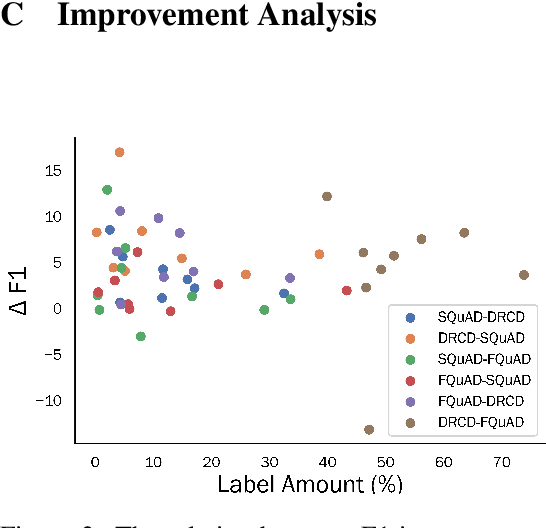
Substantial improvements have been made in machine reading comprehension, where the machine answers questions based on a given context. Current state-of-the-art models even surpass human performance on several benchmarks. However, their abilities in the cross-lingual scenario are still to be explored. Previous works have revealed the abilities of pre-trained multilingual models for zero-shot cross-lingual reading comprehension. In this paper, we further utilized unlabeled data to improve the performance. The model is first supervised-trained on source language corpus, and then self-trained with unlabeled target language data. The experiment results showed improvements for all languages, and we also analyzed how self-training benefits cross-lingual reading comprehension in qualitative aspects.