 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Paper and Code
Oct 15, 2023
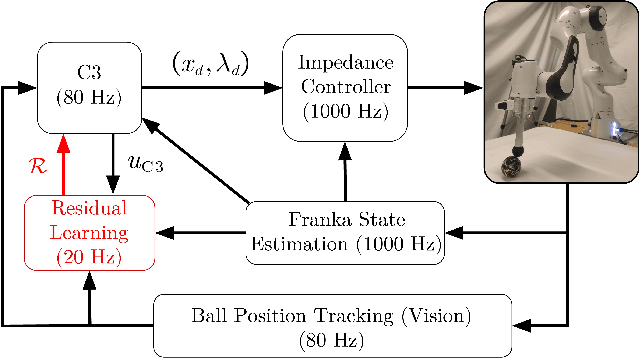
The hybrid nature of multi-contact robotic systems, due to making and breaking contact with the environment, creates significant challenges for high-quality control. Existing model-based methods typically rely on either good prior knowledge of the multi-contact model or require significant offline model tuning effort, thus resulting in low adaptability and robustness. In this paper, we propose a real-time adaptive multi-contact model predictive control framework, which enables online adaption of the hybrid multi-contact model and continuous improvement of the control performance for contact-rich tasks. This framework includes an adaption module, which continuously learns a residual of the hybrid model to minimize the gap between the prior model and reality, and a real-time multi-contact MPC controller. We demonstrated the effectiveness of the framework in synthetic examples, and applied it on hardware to solve contact-rich manipulation tasks, where a robot uses its end-effector to roll different unknown objects on a table to track given paths. The hardware experiments show that with a rough prior model, the multi-contact MPC controller adapts itself on-the-fly with an adaption rate around 20 Hz and successfully manipulates previously unknown objects with non-smooth surface geometries.