 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFR-Mamba: Time-Series Physical Field Reconstruction Based on State Space Model
May 21, 2025Physical field reconstruction (PFR) aims to predict the state distribution of physical quantities (e.g., velocity, pressure, and temperature) based on limited sensor measurements. It plays a critical role in domains such as fluid dynamics and thermodynamics. However, existing deep learning methods often fail to capture long-range temporal dependencies, resulting in suboptimal performance on time-evolving physical systems. To address this, we propose FR-Mamba, a novel spatiotemporal flow field reconstruction framework based on state space modeling. Specifically, we design a hybrid neural network architecture that combines Fourier Neural Operator (FNO) and State Space Model (SSM) to capture both global spatial features and long-range temporal dependencies. We adopt Mamba, a recently proposed efficient SSM architecture, to model long-range temporal dependencies with linear time complexity. In parallel, the FNO is employed to capture non-local spatial features by leveraging frequency-domain transformations. The spatiotemporal representations extracted by these two components are then fused to reconstruct the full-field distribution of the physical system. Extensive experiments demonstrate that our approach significantly outperforms existing PFR methods in flow field reconstruction tasks, achieving high-accuracy performance on long sequences.
GPTDrawer: Enhancing Visual Synthesis through ChatGPT
Dec 11, 2024
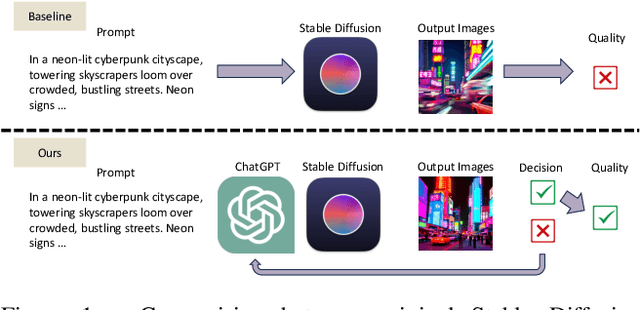
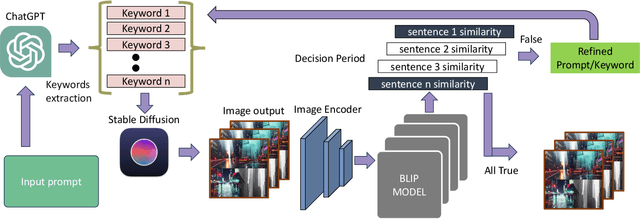
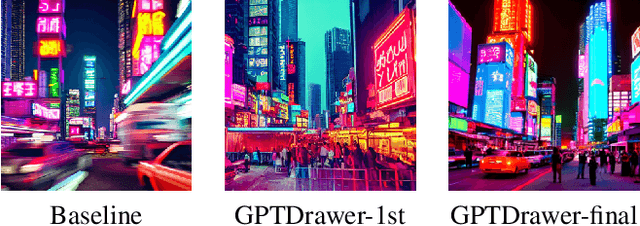
In the burgeoning field of AI-driven image generation, the quest for precision and relevance in response to textual prompts remains paramount. This paper introduces GPTDrawer, an innovative pipeline that leverages the generative prowess of GPT-based models to enhance the visual synthesis process. Our methodology employs a novel algorithm that iteratively refines input prompts using keyword extraction, semantic analysis, and image-text congruence evaluation. By integrating ChatGPT for natural language processing and Stable Diffusion for image generation, GPTDrawer produces a batch of images that undergo successive refinement cycles, guided by cosine similarity metrics until a threshold of semantic alignment is attained. The results demonstrate a marked improvement in the fidelity of images generated in accordance with user-defined prompts, showcasing the system's ability to interpret and visualize complex semantic constructs. The implications of this work extend to various applications, from creative arts to design automation, setting a new benchmark for AI-assisted creative processes.
Perseus: Leveraging Common Data Patterns with Curriculum Learning for More Robust Graph Neural Networks
Oct 16, 2024



Graph Neural Networks (GNNs) excel at handling graph data but remain vulnerable to adversarial attacks. Existing defense methods typically rely on assumptions like graph sparsity and homophily to either preprocess the graph or guide structure learning. However, preprocessing methods often struggle to accurately distinguish between normal edges and adversarial perturbations, leading to suboptimal results due to the loss of valuable edge information. Robust graph neural network models train directly on graph data affected by adversarial perturbations, without preprocessing. This can cause the model to get stuck in poor local optima, negatively affecting its performance. To address these challenges, we propose Perseus, a novel adversarial defense method based on curriculum learning. Perseus assesses edge difficulty using global homophily and applies a curriculum learning strategy to adjust the learning order, guiding the model to learn the full graph structure while adaptively focusing on common data patterns. This approach mitigates the impact of adversarial perturbations. Experiments show that models trained with Perseus achieve superior performance and are significantly more robust to adversarial attacks.
Exploiting Global Graph Homophily for Generalized Defense in Graph Neural Networks
Jun 06, 2024


Graph neural network (GNN) models play a pivotal role in numerous tasks involving graph-related data analysis. Despite their efficacy, similar to other deep learning models, GNNs are susceptible to adversarial attacks. Even minor perturbations in graph data can induce substantial alterations in model predictions. While existing research has explored various adversarial defense techniques for GNNs, the challenge of defending against adversarial attacks on real-world scale graph data remains largely unresolved. On one hand, methods reliant on graph purification and preprocessing tend to excessively emphasize local graph information, leading to sub-optimal defensive outcomes. On the other hand, approaches rooted in graph structure learning entail significant time overheads, rendering them impractical for large-scale graphs. In this paper, we propose a new defense method named Talos, which enhances the global, rather than local, homophily of graphs as a defense. Experiments show that the proposed approach notably outperforms state-of-the-art defense approaches, while imposing little computational overhead.
Joint mode switching and resource allocation in wireless-powered RIS-aided multiuser communication systems
Feb 19, 2024



This paper investigates a wireless-powered hybrid reflecting intelligent surface (hybrid RIS)-assisted multiple access system, where the RIS can harvest energy from energy station (ES) transmitted radio frequency signal (RF), and each reflecting element can flexibly switch between active mode, passive mode, and idle mode. The objective is to minimize the maximum energy consumption of the users by jointly optimizing the operating modes of each reflecting element, the amplification factor of active elements, the transmit power, and transmission time allocation, subject to quality-of-service (QoS) of each user and the available energy constraint of RIS. In the formulated optimization problem, the operating modes of each reflecting element are highly coupled with the amplification coefficient of the active reflecting elements, making it a challenging mixed-integer programming problem. To solve this problem, a hierarchical optimization method based on deep reinforcement learning is proposed, where the operating modes of each reflecting element and the amplification coefficient of active elements are obtained by solving the outer sub-problem using proximal policy optimization (PPO), and the transmit power and transmission time allocation are obtained by solving the inner sub-problem using convex optimization methods. Simulation results show that compared to the baseline scheme, the proposed scheme can reduce user energy consumption by $70 \%$.
Fleet Rebalancing for Expanding Shared e-Mobility Systems: A Multi-agent Deep Reinforcement Learning Approach
Nov 11, 2022



The electrification of shared mobility has become popular across the globe. Many cities have their new shared e-mobility systems deployed, with continuously expanding coverage from central areas to the city edges. A key challenge in the operation of these systems is fleet rebalancing, i.e., how EVs should be repositioned to better satisfy future demand. This is particularly challenging in the context of expanding systems, because i) the range of the EVs is limited while charging time is typically long, which constrain the viable rebalancing operations; and ii) the EV stations in the system are dynamically changing, i.e., the legitimate targets for rebalancing operations can vary over time. We tackle these challenges by first investigating rich sets of data collected from a real-world shared e-mobility system for one year, analyzing the operation model, usage patterns and expansion dynamics of this new mobility mode. With the learned knowledge we design a high-fidelity simulator, which is able to abstract key operation details of EV sharing at fine granularity. Then we model the rebalancing task for shared e-mobility systems under continuous expansion as a Multi-Agent Reinforcement Learning (MARL) problem, which directly takes the range and charging properties of the EVs into account. We further propose a novel policy optimization approach with action cascading, which is able to cope with the expansion dynamics and solve the formulated MARL. We evaluate the proposed approach extensively, and experimental results show that our approach outperforms the state-of-the-art, offering significant performance gain in both satisfied demand and net revenue.