 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTRIDE: Automating Reward Design, Deep Reinforcement Learning Training and Feedback Optimization in Humanoid Robotics Locomotion
Feb 10, 2025



Humanoid robotics presents significant challenges in artificial intelligence, requiring precise coordination and control of high-degree-of-freedom systems. Designing effective reward functions for deep reinforcement learning (DRL) in this domain remains a critical bottleneck, demanding extensive manual effort, domain expertise, and iterative refinement. To overcome these challenges, we introduce STRIDE, a novel framework built on agentic engineering to automate reward design, DRL training, and feedback optimization for humanoid robot locomotion tasks. By combining the structured principles of agentic engineering with large language models (LLMs) for code-writing, zero-shot generation, and in-context optimization, STRIDE generates, evaluates, and iteratively refines reward functions without relying on task-specific prompts or templates. Across diverse environments featuring humanoid robot morphologies, STRIDE outperforms the state-of-the-art reward design framework EUREKA, achieving significant improvements in efficiency and task performance. Using STRIDE-generated rewards, simulated humanoid robots achieve sprint-level locomotion across complex terrains, highlighting its ability to advance DRL workflows and humanoid robotics research.
Exploiting Global Graph Homophily for Generalized Defense in Graph Neural Networks
Jun 06, 2024

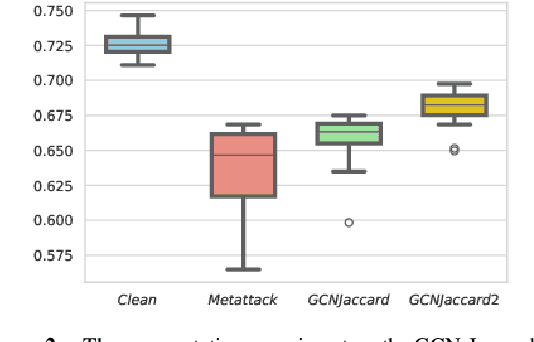

Graph neural network (GNN) models play a pivotal role in numerous tasks involving graph-related data analysis. Despite their efficacy, similar to other deep learning models, GNNs are susceptible to adversarial attacks. Even minor perturbations in graph data can induce substantial alterations in model predictions. While existing research has explored various adversarial defense techniques for GNNs, the challenge of defending against adversarial attacks on real-world scale graph data remains largely unresolved. On one hand, methods reliant on graph purification and preprocessing tend to excessively emphasize local graph information, leading to sub-optimal defensive outcomes. On the other hand, approaches rooted in graph structure learning entail significant time overheads, rendering them impractical for large-scale graphs. In this paper, we propose a new defense method named Talos, which enhances the global, rather than local, homophily of graphs as a defense. Experiments show that the proposed approach notably outperforms state-of-the-art defense approaches, while imposing little computational overhead.
An Unsupervised Machine Learning Approach to Assess the ZIP Code Level Impact of COVID-19 in NYC
Jun 11, 2020


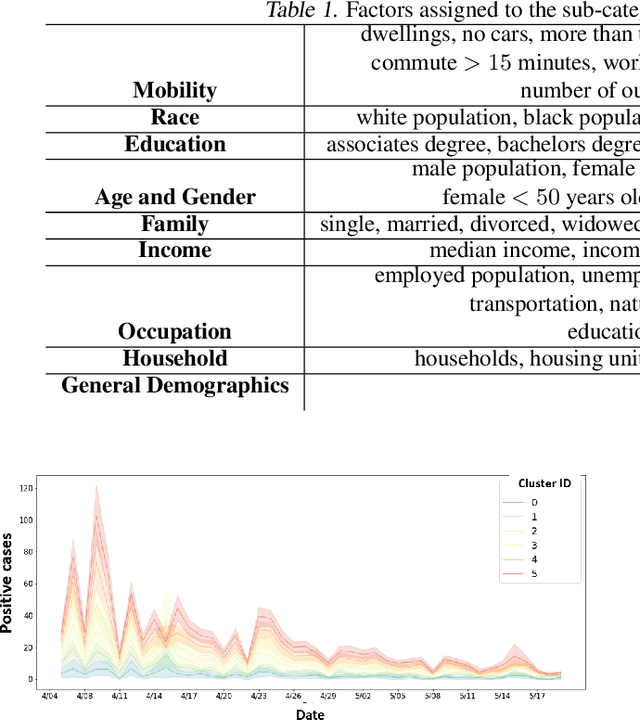
New York City has been recognized as the world's epicenter of the novel Coronavirus pandemic. To identify the key inherent factors that are highly correlated to the Increase Rate of COVID-19 new cases in NYC, we propose an unsupervised machine learning framework. Based on the assumption that ZIP code areas with similar demographic, socioeconomic, and mobility patterns are likely to experience similar outbreaks, we select the most relevant features to perform a clustering that can best reflect the spread, and map them down to 9 interpretable categories. We believe that our findings can guide policy makers to promptly anticipate and prevent the spread of the virus by taking the right measures.