 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFleet Rebalancing for Expanding Shared e-Mobility Systems: A Multi-agent Deep Reinforcement Learning Approach
Nov 11, 2022



The electrification of shared mobility has become popular across the globe. Many cities have their new shared e-mobility systems deployed, with continuously expanding coverage from central areas to the city edges. A key challenge in the operation of these systems is fleet rebalancing, i.e., how EVs should be repositioned to better satisfy future demand. This is particularly challenging in the context of expanding systems, because i) the range of the EVs is limited while charging time is typically long, which constrain the viable rebalancing operations; and ii) the EV stations in the system are dynamically changing, i.e., the legitimate targets for rebalancing operations can vary over time. We tackle these challenges by first investigating rich sets of data collected from a real-world shared e-mobility system for one year, analyzing the operation model, usage patterns and expansion dynamics of this new mobility mode. With the learned knowledge we design a high-fidelity simulator, which is able to abstract key operation details of EV sharing at fine granularity. Then we model the rebalancing task for shared e-mobility systems under continuous expansion as a Multi-Agent Reinforcement Learning (MARL) problem, which directly takes the range and charging properties of the EVs into account. We further propose a novel policy optimization approach with action cascading, which is able to cope with the expansion dynamics and solve the formulated MARL. We evaluate the proposed approach extensively, and experimental results show that our approach outperforms the state-of-the-art, offering significant performance gain in both satisfied demand and net revenue.
Deployment Optimization for Shared e-Mobility Systems with Multi-agent Deep Neural Search
Nov 03, 2021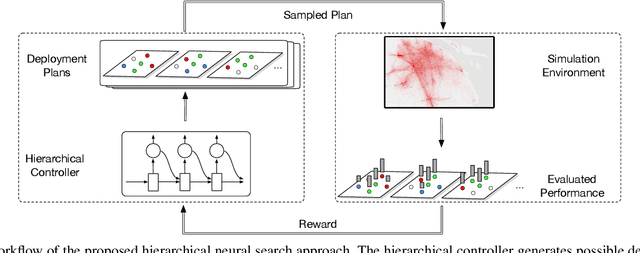
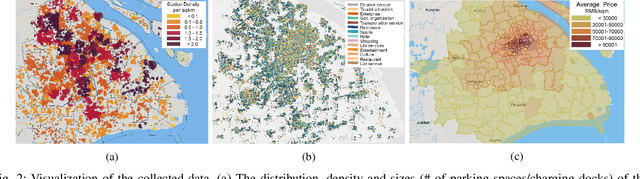
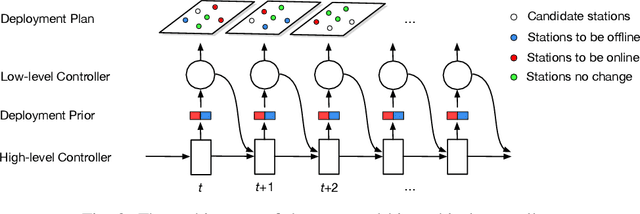
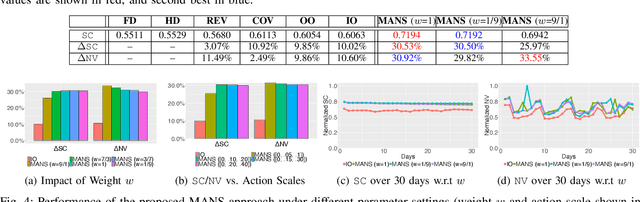
Shared e-mobility services have been widely tested and piloted in cities across the globe, and already woven into the fabric of modern urban planning. This paper studies a practical yet important problem in those systems: how to deploy and manage their infrastructure across space and time, so that the services are ubiquitous to the users while sustainable in profitability. However, in real-world systems evaluating the performance of different deployment strategies and then finding the optimal plan is prohibitively expensive, as it is often infeasible to conduct many iterations of trial-and-error. We tackle this by designing a high-fidelity simulation environment, which abstracts the key operation details of the shared e-mobility systems at fine-granularity, and is calibrated using data collected from the real-world. This allows us to try out arbitrary deployment plans to learn the optimal given specific context, before actually implementing any in the real-world systems. In particular, we propose a novel multi-agent neural search approach, in which we design a hierarchical controller to produce tentative deployment plans. The generated deployment plans are then tested using a multi-simulation paradigm, i.e., evaluated in parallel, where the results are used to train the controller with deep reinforcement learning. With this closed loop, the controller can be steered to have higher probability of generating better deployment plans in future iterations. The proposed approach has been evaluated extensively in our simulation environment, and experimental results show that it outperforms baselines e.g., human knowledge, and state-of-the-art heuristic-based optimization approaches in both service coverage and net revenue.
PGCD: a position-guied contributive distribution unit for aspect based sentiment analysis
Aug 11, 2021
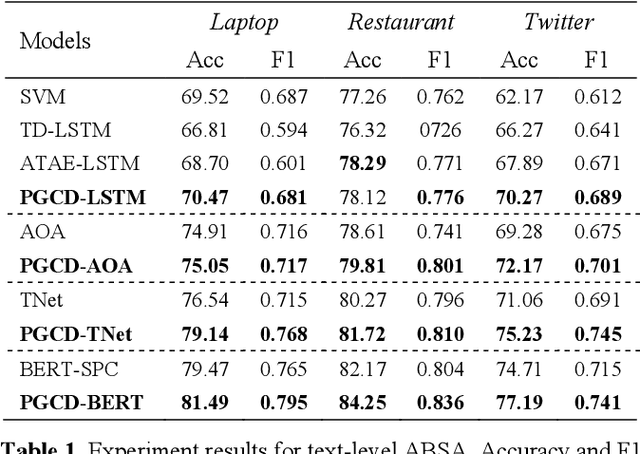
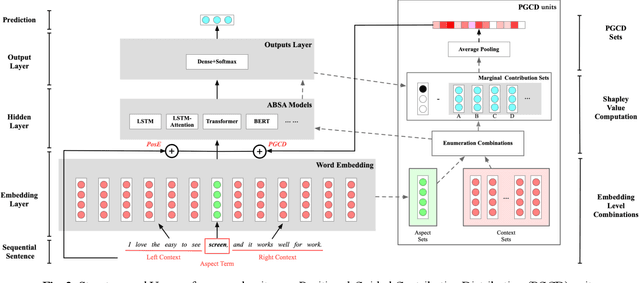
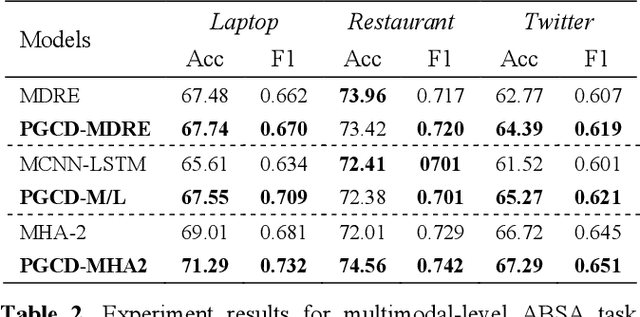
Aspect based sentiment analysis (ABSA), exploring sentim- ent polarity of aspect-given sentence, has drawn widespread applications in social media and public opinion. Previously researches typically derive aspect-independent representation by sentence feature generation only depending on text data. In this paper, we propose a Position-Guided Contributive Distribution (PGCD) unit. It achieves a position-dependent contributive pattern and generates aspect-related statement feature for ABSA task. Quoted from Shapley Value, PGCD can gain position-guided contextual contribution and enhance the aspect-based representation. Furthermore, the unit can be used for improving effects on multimodal ABSA task, whose datasets restructured by ourselves. Extensive experiments on both text and text-audio level using dataset (SemEval) show that by applying the proposed unit, the mainstream models advance performance in accuracy and F1 score.
Dynamic Demand Prediction for Expanding Electric Vehicle Sharing Systems: A Graph Sequence Learning Approach
Mar 10, 2019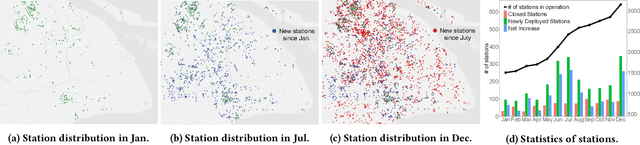
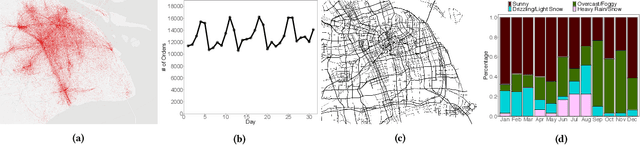
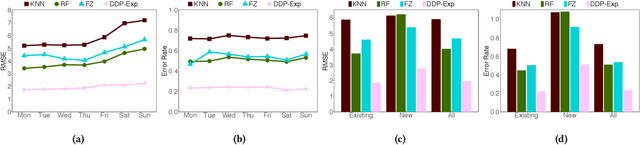
Electric Vehicle (EV) sharing systems have recently experienced unprecedented growth across the globe. During their fast expansion, one fundamental determinant for success is the capability of dynamically predicting the demand of stations as the entire system is evolving continuously. There are several challenges in this dynamic demand prediction problem. Firstly, unlike most of the existing work which predicts demand only for static systems or at few stages of expansion, in the real world we often need to predict the demand as or even before stations are being deployed or closed, to provide information and support for decision making. Secondly, for the stations to be deployed, there is no historical record or additional mobility data available to help the prediction of their demand. Finally, the impact of deploying/closing stations to the remaining stations in the system can be very complex. To address these challenges, in this paper we propose a novel dynamic demand prediction approach based on graph sequence learning, which is able to model the dynamics during the system expansion and predict demand accordingly. We use a local temporal encoding process to handle the available historical data at individual stations, and a dynamic spatial encoding process to take correlations between stations into account with graph convolutional neural networks. The encoded features are fed to a multi-scale prediction network, which forecasts both the long-term expected demand of the stations and their instant demand in the near future. We evaluate the proposed approach on real-world data collected from a major EV sharing platform in Shanghai for one year. Experimental results demonstrate that our approach significantly outperforms the state of the art, showing up to three-fold performance gain in predicting demand for the rapidly expanding EV sharing system.