 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaCo: a QP-based robot planning and control framework
Nov 08, 2025This article introduces PlaCo, a software framework designed to simplify the formulation and solution of Quadratic Programming (QP)-based planning and control problems for robotic systems. PlaCo provides a high-level interface that abstracts away the low-level mathematical formulation of QP problems, allowing users to specify tasks and constraints in a modular and intuitive manner. The framework supports both Python bindings for rapid prototyping and a C++ implementation for real-time performance.
Extended Friction Models for the Physics Simulation of Servo Actuators
Oct 11, 2024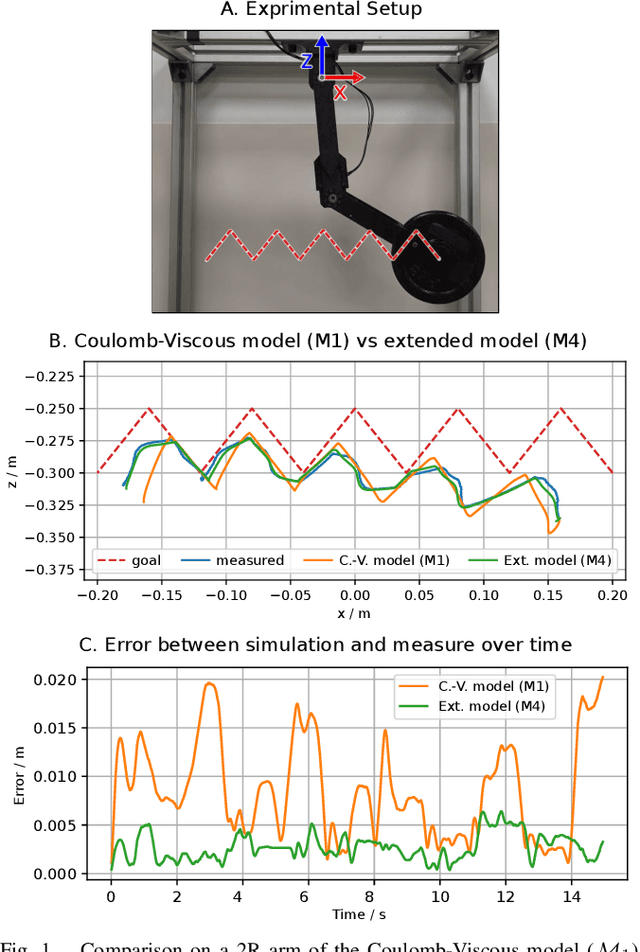
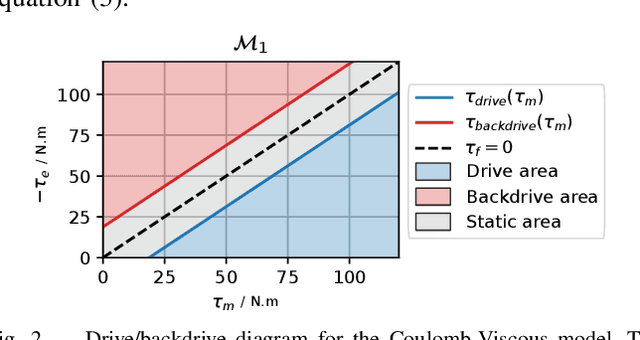
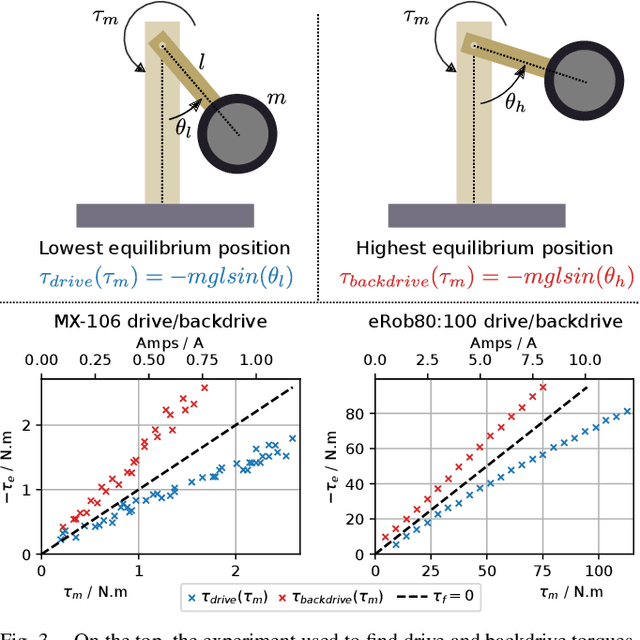
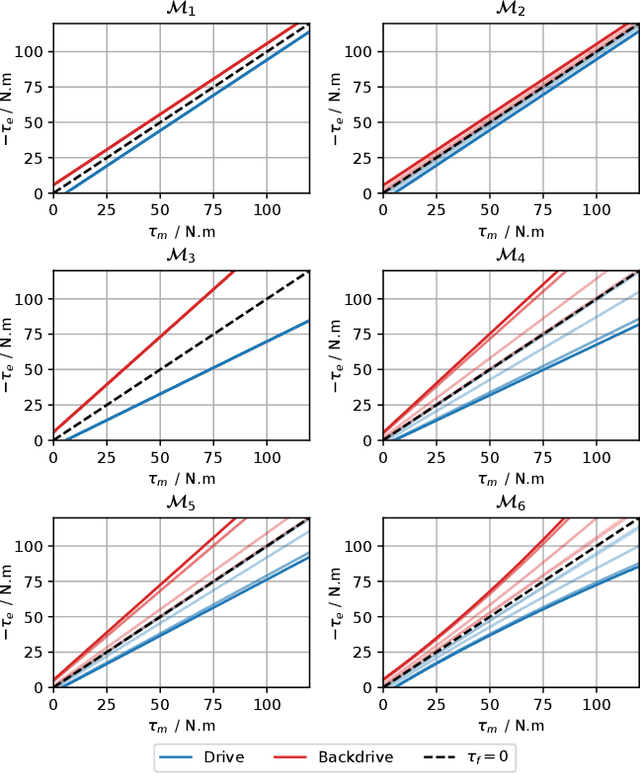
Accurate physical simulation is crucial for the development and validation of control algorithms in robotic systems. Recent works in Reinforcement Learning (RL) take notably advantage of extensive simulations to produce efficient robot control. State-of-the-art servo actuator models generally fail at capturing the complex friction dynamics of these systems. This limits the transferability of simulated behaviors to real-world applications. In this work, we present extended friction models that allow to more accurately simulate servo actuator dynamics. We propose a comprehensive analysis of various friction models, present a method for identifying model parameters using recorded trajectories from a pendulum test bench, and demonstrate how these models can be integrated into physics engines. The proposed friction models are validated on four distinct servo actuators and tested on 2R manipulators, showing significant improvements in accuracy over the standard Coulomb-Viscous model. Our results highlight the importance of considering advanced friction effects in the simulation of servo actuators to enhance the realism and reliability of robotic simulations.
Re-expression of manual expertise through semi-automatic control of a teleoperated system
Jul 23, 2024



While the search for new solvents in the chemical industry is of uttermost importance with respect to environmental considerations, this domain remains strongly tied to highly manual and visual inspection tasks by human experts. As the manipulated chemicals may imply a critical danger (CMR substances), mechanical protection barrier are used (fume hoods, gloveboxes). This, in turn, can induce postural discomfort in the long term. Carrying out this task using a remotely controlled robot to reproduce the desired vial motions would alleviate these postural constraints. Nevertheless, the adoption of such a system will depend on its ability to transcribe the users' expertise. Particular attention must be paid to the intuitiveness of the system : transparency of the actions performed, relevance of the perceptual feedback, etc. and, in particular, the fidelity of the movements performed in relation to the user's commands. However, the extent of the rotational movements to be generated and the task interactivity complicates the problem both from the point of view of the motor capacities of industrial robots and for the transparency/responsiveness of the control.To tackle the problen of guaranteeing a secure and reactive expression of the manual characteristics of this task, we propose to separate the control of movement into two parts: control of the path (set of spatial poses) and of the trajectories associated with this path (speed, direction of travel along the path). The user can then partially control the robot's movements, by choosing the type of generic, secure path and modulating the trajectory performed on this path in real time. Although this drastically limits the possibilities for interaction, we assume that this teleoperated system can enable this type of observation task to be carried out as effectively as for direct manipulation. This hypothesis was tested through an experiment in which a reading task, less dangerous but with similar characteristics to the application task, had to be performed using different variants of trajectory modulation. This experiment consisted in reading words printed on four white capsules (dimensions 6 x 12 mm) placed into cylindrical vials ( dimensions 16 mm x 70 mm). Four randomly selected vials were tested by each variant. Firstly, users had to perform the task via direct handling, then under conditions secured by a protection barrier. Users were then invited to perform the task using different trajectory modulation variants (modulation and passive viewing of a pre-recorded video, modulation of the trajectory of a Franka-Emika Panda robot performing the task in real time in front of a monocular Logitech Brio 4K camera). After each trial of a variant, users evaluate different aspects of this variant (manual and visual performance, ease of use, acceptability of the interface) through a questionnaire. During the trials, various objective criteria are also measured (number and nature of interaction with the interface, time and degree of success in the task). This experiment was carried out with 37 subjects (age : 27$\pm$5, 20 females). The data recorded showed that the proportion of successes, as well as the subjects' perceptions of visual performance, comfort of use and acceptability of the interface, were similar and high for all the variants. This suggests that this task is indeed achievable via the proposed interface. However, data also showed that average task completion times when using the trajectory modulation variants were significantly higher than handling by hand variants, which implies that the proposed remote semi-automatic control procedure fails to achieve satisfactory performance regarding execution time. An interface allowing more reactive manipulation of the vial's movements seems necessary, and will be tested in a future experiment.
Simulation Study of the Upper-limb Wrench Feasible Set with Glenohumeral Joint Constraints
Sep 14, 2023



The aim of this work is to improve musculoskeletal-based models of the upper-limb Wrench Feasible Set i.e. the set of achievable maximal wrenches at the hand for applications in collaborative robotics and computer aided ergonomics. In particular, a recent method performing wrench capacity evaluation called the Iterative Convex Hull Method is upgraded in order to integrate non dislocation and compression limitation constraints at the glenohumeral joint not taken into account in the available models. Their effects on the amplitude of the force capacities at the hand, glenohumeral joint reaction forces and upper-limb muscles coordination in comparison to the original iterative convex hull method are investigated in silico. The results highlight the glenohumeral potential dislocation for the majority of elements of the wrench feasible set with the original Iterative Convex Hull method and the fact that the modifications satisfy correctly stability constraints at the glenohumeral joint. Also, the induced muscles coordination pattern favors the action of stabilizing muscles, in particular the rotator-cuff muscles, and lowers that of known potential destabilizing ones according to the literature.
On-line feasible wrench polytope evaluation based on human musculoskeletal models: an iterative convex hull method
Oct 13, 2021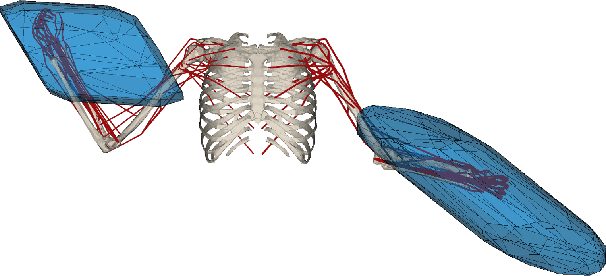
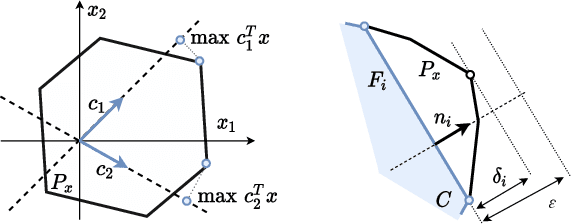
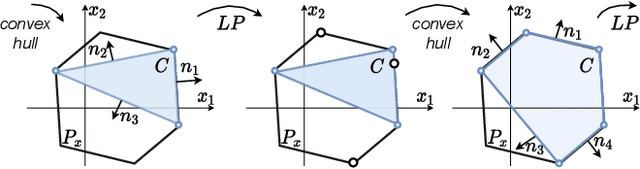
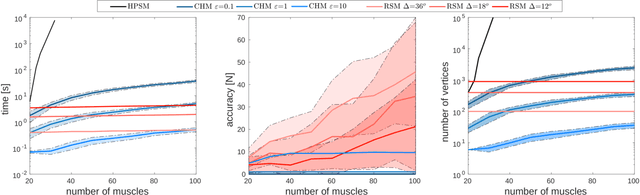
Many recent human-robot collaboration strategies, such as Assist-As-Needed (AAN), are promoting humancentered robot control, where the robot continuously adapts its assistance level based on the real-time need of its human counterpart. One of the fundamental assumptions of these approaches is the ability to measure or estimate the physical capacity of humans in real-time. In this work, we propose an algorithm for the feasibility set analysis of a generic class of linear algebra problems. This novel iterative convex-hull method is applied to the determination of the feasible Cartesian wrench polytope associated to a musculoskeletal model of the human upper limb. The method is capable of running in real-time and allows the user to define the desired estimation accuracy. The algorithm performance analysis shows that the execution time has near-linear relationship to the considered number of muscles, as opposed to the exponential relationship of the conventional methods. Finally, real-time robot control application of the algorithm is demonstrated in a Collaborative carrying experiment, where a human operator and a Franka Emika Panda robot jointly carry a 7kg object. The robot is controlled in accordance to the AAN paradigm maintaining the load carried by the human operator at 30% of its carrying capacity.
Efficient Set-Based Approaches for the Reliable Computation of Robot Capabilities
Apr 01, 2021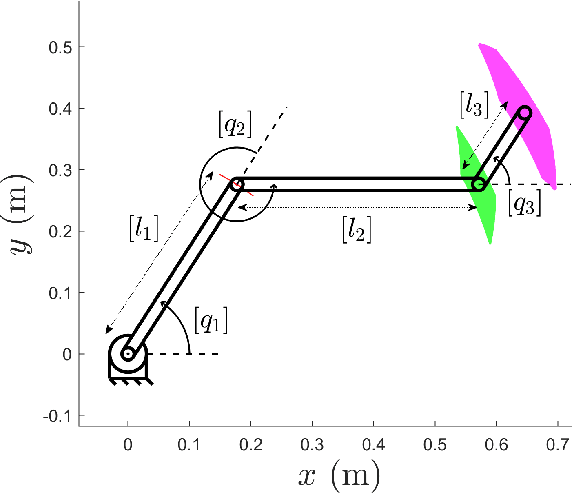
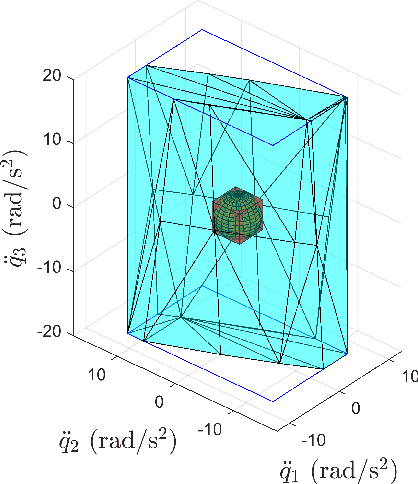
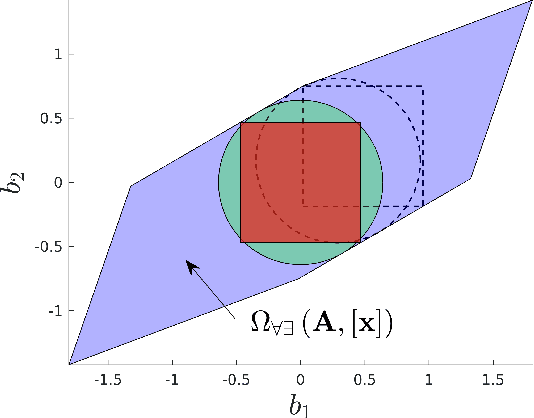
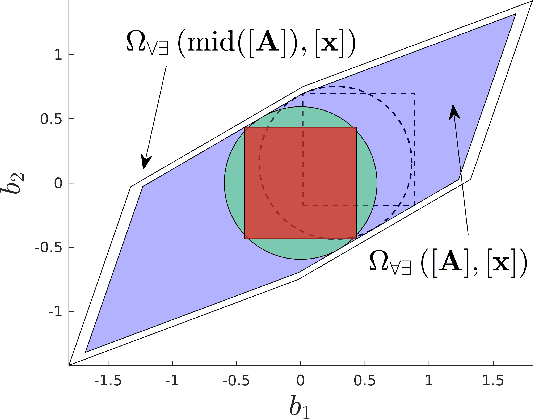
To reliably model real robot characteristics, interval linear systems of equations allow to describe families of problems that consider sets of values. This allows to easily account for typical complexities such as sets of joint states and design parameter uncertainties. Inner approximations of the solutions to the interval linear systems can be used to describe the common capabilities of a robotic manipulator corresponding to the considered sets of values. In this work, several classes of problems are considered. For each class, reliable and efficient polytope, n-cube, and n-ball inner approximations are presented. The interval approaches usually proposed are inefficient because they are too computationally heavy for certain applications, such as control. We propose efficient new inner approximation theorems for the considered classes of problems. This allows for usage with real-time applications as well as rapid analysis of potential designs. Several applications are presented for a redundant planar manipulator including locally evaluating the manipulator's velocity, acceleration, and static force capabilities, and evaluating its future acceleration capabilities over a given time horizon.
On-line force capability evaluation based on efficient polytope vertex search
Nov 10, 2020



Ellipsoid-based manipulability measures are often used to characterize the force/velocity task-space capabilities of robots. While computationally simple, this approach largely approximate and underestimate the true capabilities. Force/velocity polytopes appear to be a more appropriate representation to characterize robot's task-space capabilities. However, due to the computational complexity of the associated vertex search problem, the polytope approach is mostly restricted to offline use, e.g. as a tool aiding robot mechanical design, robot placement in work-space and offline trajectory planning. In this paper, a novel on-line polytope vertex search algorithm is proposed. It exploits the parallelotop geometry of actuator constraints. The proposed algorithm significantly reduces the complexity and computation time of the vertex search problem in comparison to commonly used algorithms. In order to highlight the on-line capability of the proposed algorithm and its potential for robot control, a challenging experiment with two collaborating Franka Emika Panda robots, carrying a load of 12 kilograms, is proposed. In this experiment, the load distribution is adapted on-line, as a function of the configuration dependant task-space force capability of each robot, in order to avoid, as much as possible, the saturation of their capacity.
Predicting the Post-Impact Velocity of a Robotic Arm via Rigid Multibody Models: an Experimental Study
Oct 16, 2020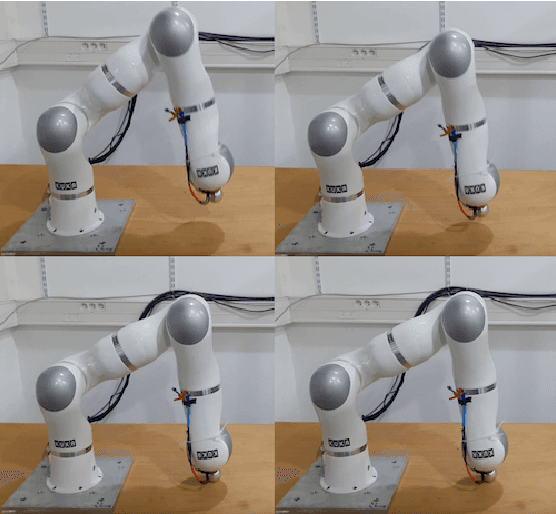
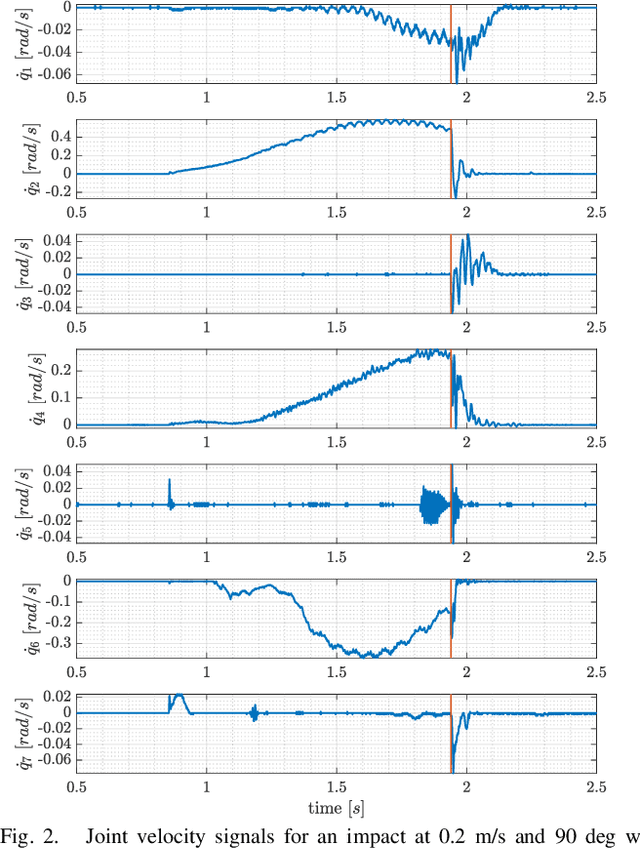
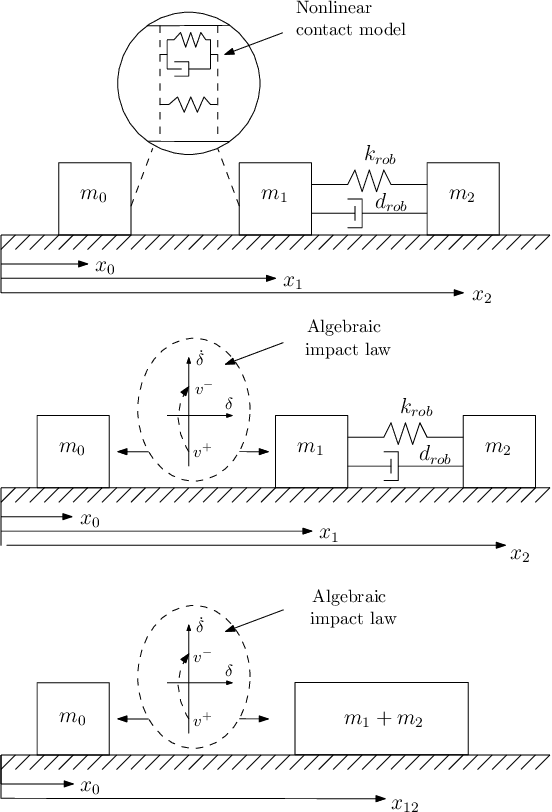
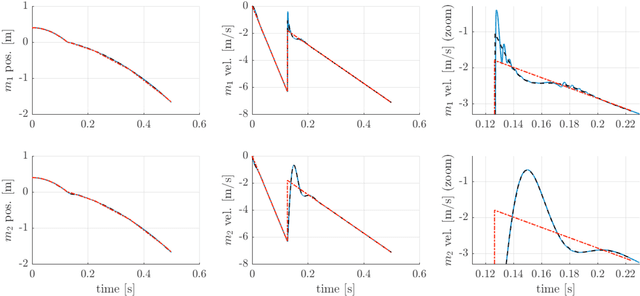
Accurate post-impact velocity predictions are essential in developing impact-aware manipulation strategies for robots, where contacts are intentionally established at non-zero speed mimicking human manipulation abilities in dynamic grasping and pushing of objects. Starting from the recorded dynamic response of a 7DOF torque-controlled robot that intentionally impacts a rigid surface, we investigate the possibility and accuracy of predicting the post-impact robot velocity from the pre-impact velocity and impact configuration. The velocity prediction is obtained by means of an impact map, derived using the framework of nonsmooth mechanics, that makes use of the known rigid-body robot model and the assumption of a frictionless inelastic impact.The main contribution is proposing a methodology that allows for a meaningful quantitative comparison between the recorded post-impact data, that exhibits a damped oscillatory response after the impact, and the post-impact velocity prediction derived via the readily available rigid-body robot model, that presents no oscillations and that is the one typically obtained via mainstream robot simulator software. The results of this new approach are promising in terms of prediction accuracy and thus relevant for the growing field of impact-aware robot control. The recorded impact data (18 experiments) is made publicly available, together with the numerical routines employed to generate the quantitative comparison, to further stimulate interest/research in this field.
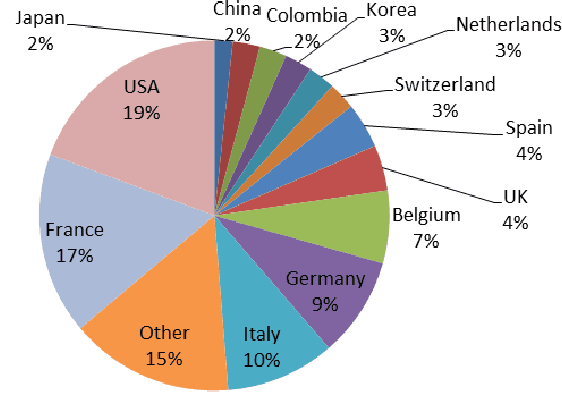
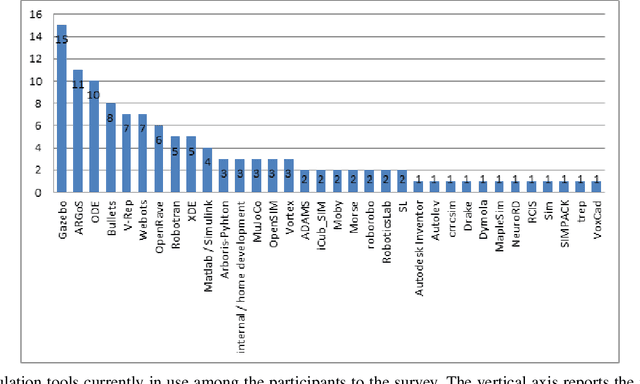
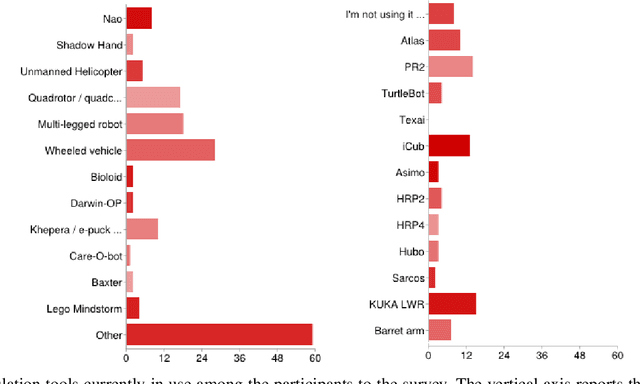
Tools for dynamics simulation of robots: a survey based on user feedback
Feb 27, 2014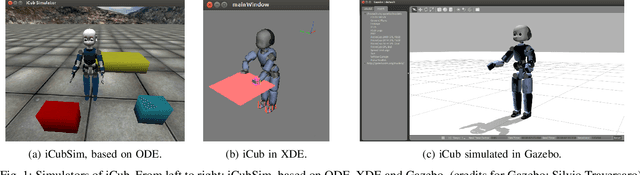
The number of tools for dynamics simulation has grown in the last years. It is necessary for the robotics community to have elements to ponder which of the available tools is the best for their research. As a complement to an objective and quantitative comparison, difficult to obtain since not all the tools are open-source, an element of evaluation is user feedback. With this goal in mind, we created an online survey about the use of dynamical simulation in robotics. This paper reports the analysis of the participants' answers and a descriptive information fiche for the most relevant tools. We believe this report will be helpful for roboticists to choose the best simulation tool for their researches.