 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaCo: a QP-based robot planning and control framework
Nov 08, 2025This article introduces PlaCo, a software framework designed to simplify the formulation and solution of Quadratic Programming (QP)-based planning and control problems for robotic systems. PlaCo provides a high-level interface that abstracts away the low-level mathematical formulation of QP problems, allowing users to specify tasks and constraints in a modular and intuitive manner. The framework supports both Python bindings for rapid prototyping and a C++ implementation for real-time performance.
FRASA: An End-to-End Reinforcement Learning Agent for Fall Recovery and Stand Up of Humanoid Robots
Oct 11, 2024



Humanoid robotics faces significant challenges in achieving stable locomotion and recovering from falls in dynamic environments. Traditional methods, such as Model Predictive Control (MPC) and Key Frame Based (KFB) routines, either require extensive fine-tuning or lack real-time adaptability. This paper introduces FRASA, a Deep Reinforcement Learning (DRL) agent that integrates fall recovery and stand up strategies into a unified framework. Leveraging the Cross-Q algorithm, FRASA significantly reduces training time and offers a versatile recovery strategy that adapts to unpredictable disturbances. Comparative tests on Sigmaban humanoid robots demonstrate FRASA superior performance against the KFB method deployed in the RoboCup 2023 by the Rhoban Team, world champion of the KidSize League.
Extended Friction Models for the Physics Simulation of Servo Actuators
Oct 11, 2024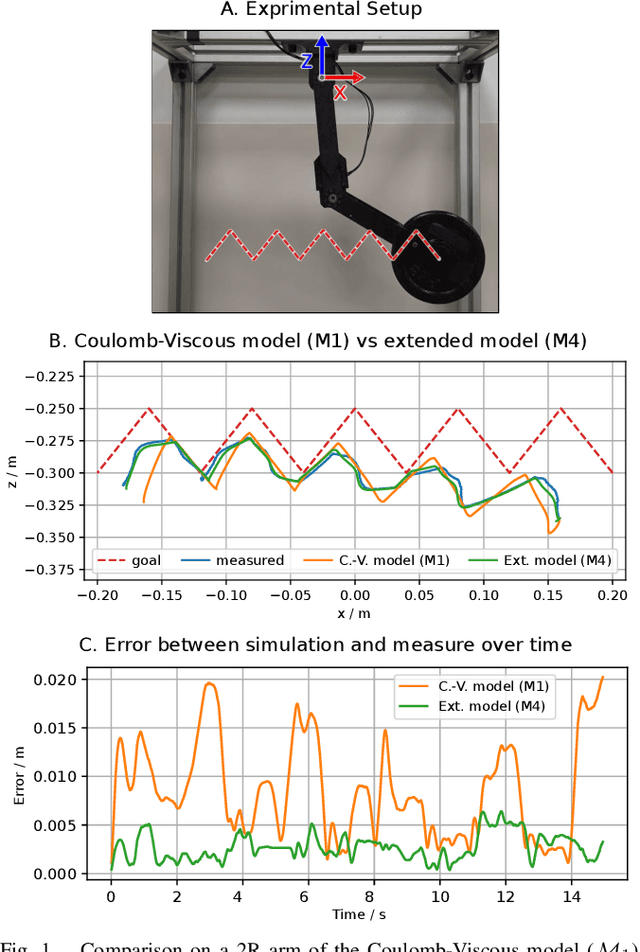
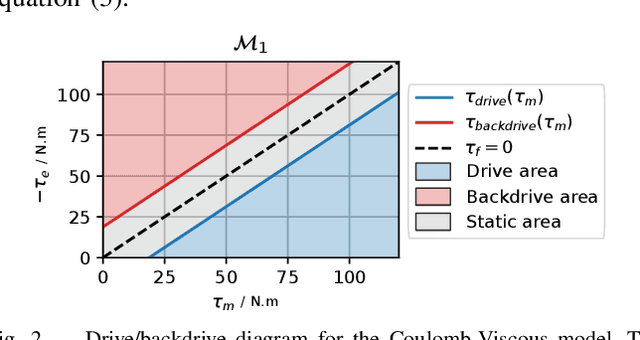
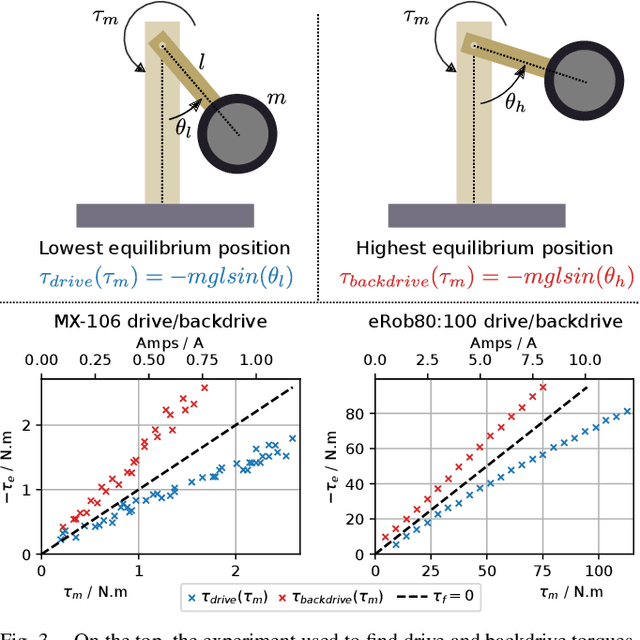
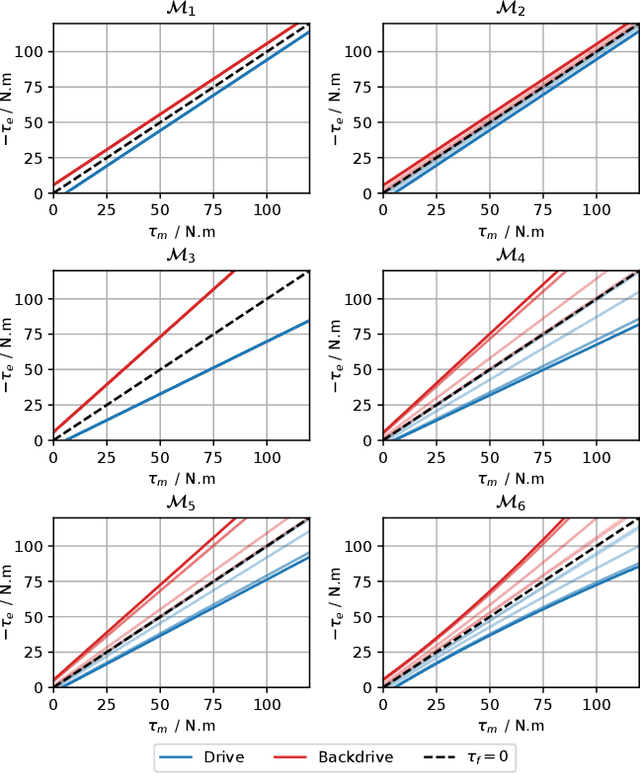
Accurate physical simulation is crucial for the development and validation of control algorithms in robotic systems. Recent works in Reinforcement Learning (RL) take notably advantage of extensive simulations to produce efficient robot control. State-of-the-art servo actuator models generally fail at capturing the complex friction dynamics of these systems. This limits the transferability of simulated behaviors to real-world applications. In this work, we present extended friction models that allow to more accurately simulate servo actuator dynamics. We propose a comprehensive analysis of various friction models, present a method for identifying model parameters using recorded trajectories from a pendulum test bench, and demonstrate how these models can be integrated into physics engines. The proposed friction models are validated on four distinct servo actuators and tested on 2R manipulators, showing significant improvements in accuracy over the standard Coulomb-Viscous model. Our results highlight the importance of considering advanced friction effects in the simulation of servo actuators to enhance the realism and reliability of robotic simulations.
Rhoban Football Club: RoboCup Humanoid Kid-Size 2023 Champion Team Paper
Feb 01, 2024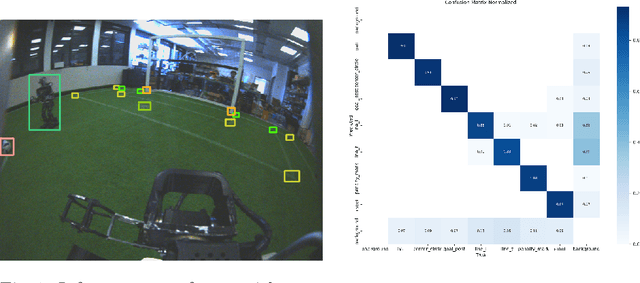
In 2023, Rhoban Football Club reached the first place of the KidSize soccer competition for the fifth time, and received the best humanoid award. This paper presents and reviews important points in robots architecture and workflow, with hindsights from the competition.