 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Sustainability Gap in Robotics: A Large-Scale Survey of Sustainability Awareness in 50,000 Research Articles
Apr 09, 2026We present a large-scale survey of sustainability communication and motivation in robotics research. Our analysis covers nearly 50,000 open-access papers from arXiv's cs.RO category published between 2015 and early 2026. In this study, we quantify how often papers mention social, ecological, and sustainability impacts, and we analyse their alignment with the UN Sustainable Development Goals (SDGs). The results reveal a persistent gap between the field's potential and its stated intent. While a large fraction of robotics papers can be mapped to SDG-relevant domains, explicit sustainability motivation remains remarkably low. Specifically, mentions of sustainability-related impacts are typically below 2%, explicit SDG references stay below 0.1%, and the proportion of sustainability-motivated papers remains below 5%. These trends suggest that while the field of robotics is advancing rapidly, sustainability is not yet a standard part of research framing. We conclude by proposing concrete actions for researchers, conferences, and institutions to close these awareness and motivation gaps, supporting a shift toward more intentional and responsible innovation.
Simulation Study of the Upper-limb Wrench Feasible Set with Glenohumeral Joint Constraints
Sep 14, 2023



The aim of this work is to improve musculoskeletal-based models of the upper-limb Wrench Feasible Set i.e. the set of achievable maximal wrenches at the hand for applications in collaborative robotics and computer aided ergonomics. In particular, a recent method performing wrench capacity evaluation called the Iterative Convex Hull Method is upgraded in order to integrate non dislocation and compression limitation constraints at the glenohumeral joint not taken into account in the available models. Their effects on the amplitude of the force capacities at the hand, glenohumeral joint reaction forces and upper-limb muscles coordination in comparison to the original iterative convex hull method are investigated in silico. The results highlight the glenohumeral potential dislocation for the majority of elements of the wrench feasible set with the original Iterative Convex Hull method and the fact that the modifications satisfy correctly stability constraints at the glenohumeral joint. Also, the induced muscles coordination pattern favors the action of stabilizing muscles, in particular the rotator-cuff muscles, and lowers that of known potential destabilizing ones according to the literature.
On-line feasible wrench polytope evaluation based on human musculoskeletal models: an iterative convex hull method
Oct 13, 2021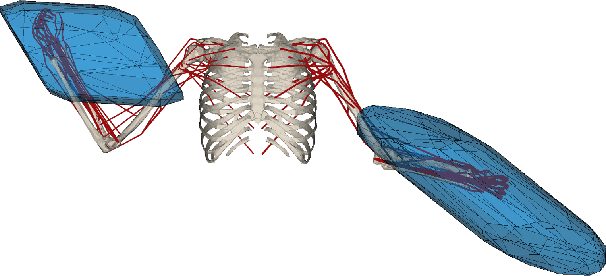
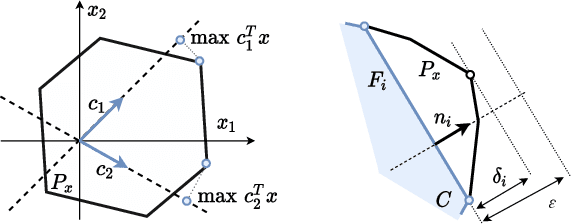
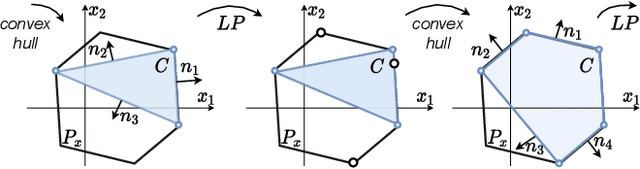
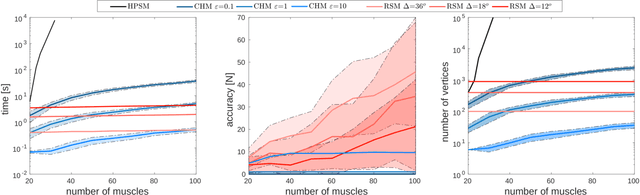
Many recent human-robot collaboration strategies, such as Assist-As-Needed (AAN), are promoting humancentered robot control, where the robot continuously adapts its assistance level based on the real-time need of its human counterpart. One of the fundamental assumptions of these approaches is the ability to measure or estimate the physical capacity of humans in real-time. In this work, we propose an algorithm for the feasibility set analysis of a generic class of linear algebra problems. This novel iterative convex-hull method is applied to the determination of the feasible Cartesian wrench polytope associated to a musculoskeletal model of the human upper limb. The method is capable of running in real-time and allows the user to define the desired estimation accuracy. The algorithm performance analysis shows that the execution time has near-linear relationship to the considered number of muscles, as opposed to the exponential relationship of the conventional methods. Finally, real-time robot control application of the algorithm is demonstrated in a Collaborative carrying experiment, where a human operator and a Franka Emika Panda robot jointly carry a 7kg object. The robot is controlled in accordance to the AAN paradigm maintaining the load carried by the human operator at 30% of its carrying capacity.
On-line force capability evaluation based on efficient polytope vertex search
Nov 10, 2020



Ellipsoid-based manipulability measures are often used to characterize the force/velocity task-space capabilities of robots. While computationally simple, this approach largely approximate and underestimate the true capabilities. Force/velocity polytopes appear to be a more appropriate representation to characterize robot's task-space capabilities. However, due to the computational complexity of the associated vertex search problem, the polytope approach is mostly restricted to offline use, e.g. as a tool aiding robot mechanical design, robot placement in work-space and offline trajectory planning. In this paper, a novel on-line polytope vertex search algorithm is proposed. It exploits the parallelotop geometry of actuator constraints. The proposed algorithm significantly reduces the complexity and computation time of the vertex search problem in comparison to commonly used algorithms. In order to highlight the on-line capability of the proposed algorithm and its potential for robot control, a challenging experiment with two collaborating Franka Emika Panda robots, carrying a load of 12 kilograms, is proposed. In this experiment, the load distribution is adapted on-line, as a function of the configuration dependant task-space force capability of each robot, in order to avoid, as much as possible, the saturation of their capacity.
Rhoban Football Club: RoboCup Humanoid KidSize 2019 Champion Team Paper
Oct 25, 2019

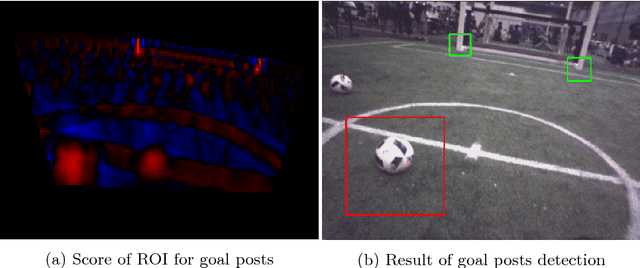
In 2019, Rhoban Football Club reached the first place of the KidSize soccer competition for the fourth time and performed the first in-game throw-in in the history of the Humanoid league. Building on our existing code-base, we improved some specific functionalities, introduced new behaviors and experimented with original methods for labeling videos. This paper presents and reviews our latest changes to both software and hardware, highlighting the lessons learned during RoboCup.