 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRe-expression of manual expertise through semi-automatic control of a teleoperated system
Jul 23, 2024



While the search for new solvents in the chemical industry is of uttermost importance with respect to environmental considerations, this domain remains strongly tied to highly manual and visual inspection tasks by human experts. As the manipulated chemicals may imply a critical danger (CMR substances), mechanical protection barrier are used (fume hoods, gloveboxes). This, in turn, can induce postural discomfort in the long term. Carrying out this task using a remotely controlled robot to reproduce the desired vial motions would alleviate these postural constraints. Nevertheless, the adoption of such a system will depend on its ability to transcribe the users' expertise. Particular attention must be paid to the intuitiveness of the system : transparency of the actions performed, relevance of the perceptual feedback, etc. and, in particular, the fidelity of the movements performed in relation to the user's commands. However, the extent of the rotational movements to be generated and the task interactivity complicates the problem both from the point of view of the motor capacities of industrial robots and for the transparency/responsiveness of the control.To tackle the problen of guaranteeing a secure and reactive expression of the manual characteristics of this task, we propose to separate the control of movement into two parts: control of the path (set of spatial poses) and of the trajectories associated with this path (speed, direction of travel along the path). The user can then partially control the robot's movements, by choosing the type of generic, secure path and modulating the trajectory performed on this path in real time. Although this drastically limits the possibilities for interaction, we assume that this teleoperated system can enable this type of observation task to be carried out as effectively as for direct manipulation. This hypothesis was tested through an experiment in which a reading task, less dangerous but with similar characteristics to the application task, had to be performed using different variants of trajectory modulation. This experiment consisted in reading words printed on four white capsules (dimensions 6 x 12 mm) placed into cylindrical vials ( dimensions 16 mm x 70 mm). Four randomly selected vials were tested by each variant. Firstly, users had to perform the task via direct handling, then under conditions secured by a protection barrier. Users were then invited to perform the task using different trajectory modulation variants (modulation and passive viewing of a pre-recorded video, modulation of the trajectory of a Franka-Emika Panda robot performing the task in real time in front of a monocular Logitech Brio 4K camera). After each trial of a variant, users evaluate different aspects of this variant (manual and visual performance, ease of use, acceptability of the interface) through a questionnaire. During the trials, various objective criteria are also measured (number and nature of interaction with the interface, time and degree of success in the task). This experiment was carried out with 37 subjects (age : 27$\pm$5, 20 females). The data recorded showed that the proportion of successes, as well as the subjects' perceptions of visual performance, comfort of use and acceptability of the interface, were similar and high for all the variants. This suggests that this task is indeed achievable via the proposed interface. However, data also showed that average task completion times when using the trajectory modulation variants were significantly higher than handling by hand variants, which implies that the proposed remote semi-automatic control procedure fails to achieve satisfactory performance regarding execution time. An interface allowing more reactive manipulation of the vial's movements seems necessary, and will be tested in a future experiment.
Simulation Study of the Upper-limb Wrench Feasible Set with Glenohumeral Joint Constraints
Sep 14, 2023



The aim of this work is to improve musculoskeletal-based models of the upper-limb Wrench Feasible Set i.e. the set of achievable maximal wrenches at the hand for applications in collaborative robotics and computer aided ergonomics. In particular, a recent method performing wrench capacity evaluation called the Iterative Convex Hull Method is upgraded in order to integrate non dislocation and compression limitation constraints at the glenohumeral joint not taken into account in the available models. Their effects on the amplitude of the force capacities at the hand, glenohumeral joint reaction forces and upper-limb muscles coordination in comparison to the original iterative convex hull method are investigated in silico. The results highlight the glenohumeral potential dislocation for the majority of elements of the wrench feasible set with the original Iterative Convex Hull method and the fact that the modifications satisfy correctly stability constraints at the glenohumeral joint. Also, the induced muscles coordination pattern favors the action of stabilizing muscles, in particular the rotator-cuff muscles, and lowers that of known potential destabilizing ones according to the literature.
On-line feasible wrench polytope evaluation based on human musculoskeletal models: an iterative convex hull method
Oct 13, 2021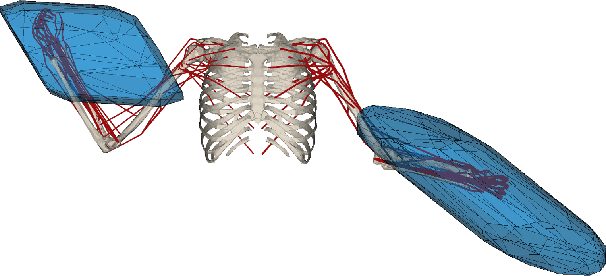
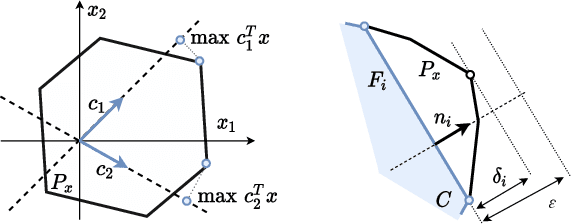
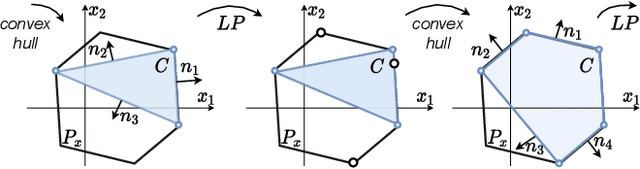
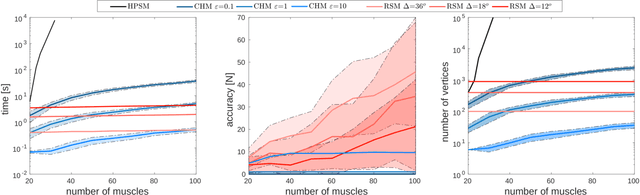
Many recent human-robot collaboration strategies, such as Assist-As-Needed (AAN), are promoting humancentered robot control, where the robot continuously adapts its assistance level based on the real-time need of its human counterpart. One of the fundamental assumptions of these approaches is the ability to measure or estimate the physical capacity of humans in real-time. In this work, we propose an algorithm for the feasibility set analysis of a generic class of linear algebra problems. This novel iterative convex-hull method is applied to the determination of the feasible Cartesian wrench polytope associated to a musculoskeletal model of the human upper limb. The method is capable of running in real-time and allows the user to define the desired estimation accuracy. The algorithm performance analysis shows that the execution time has near-linear relationship to the considered number of muscles, as opposed to the exponential relationship of the conventional methods. Finally, real-time robot control application of the algorithm is demonstrated in a Collaborative carrying experiment, where a human operator and a Franka Emika Panda robot jointly carry a 7kg object. The robot is controlled in accordance to the AAN paradigm maintaining the load carried by the human operator at 30% of its carrying capacity.