 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact-Aware Control using Time-Invariant Reference Spreading
Nov 15, 2024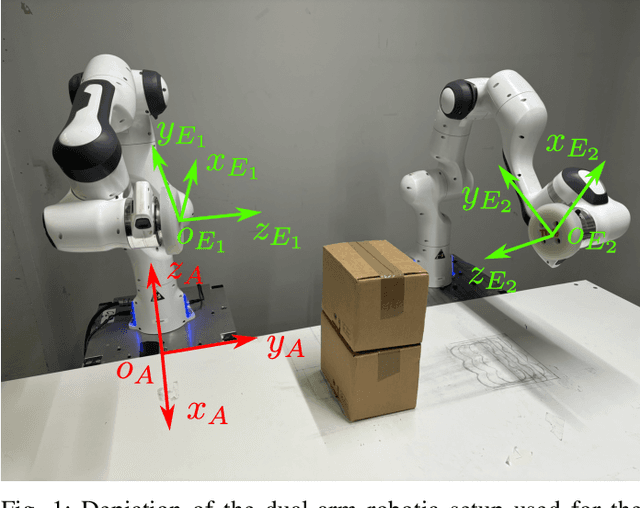
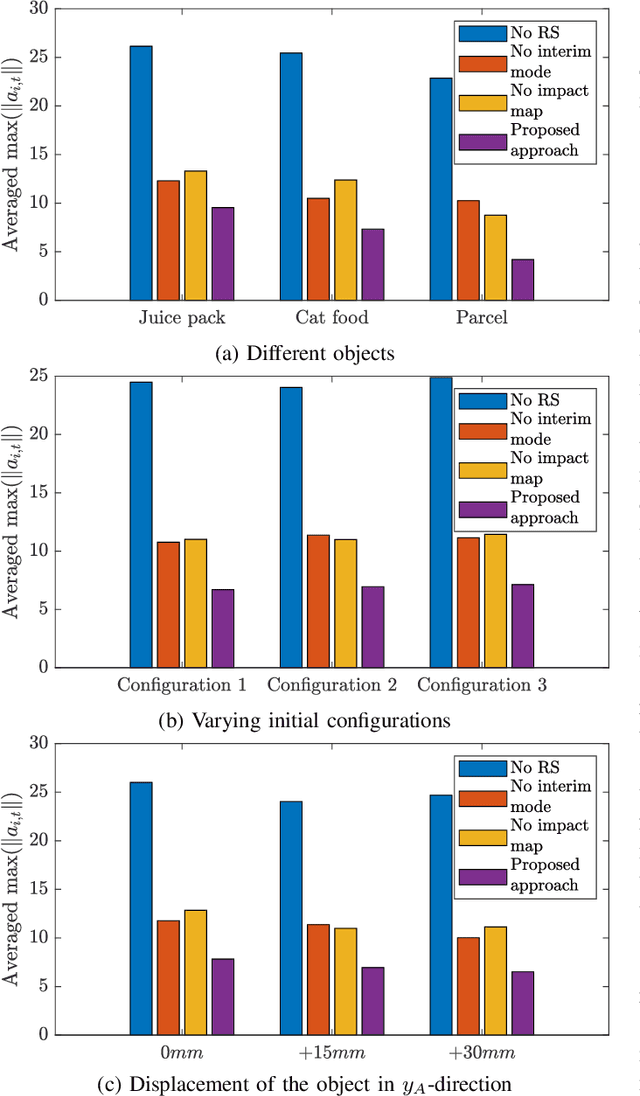
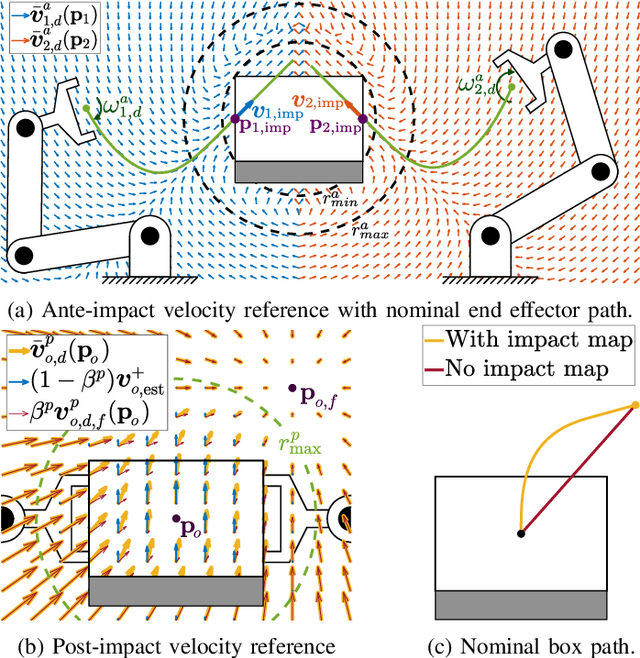
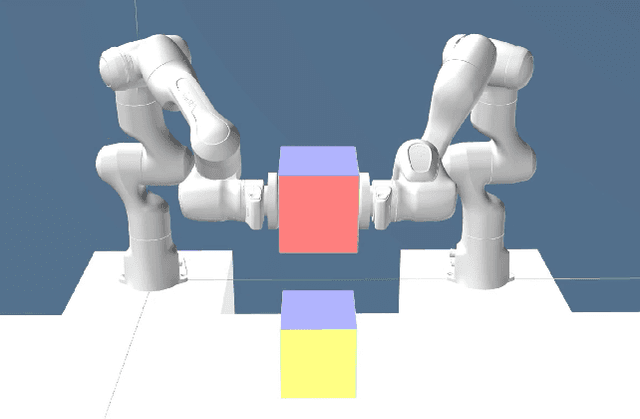
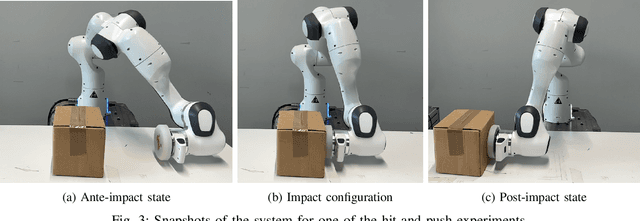
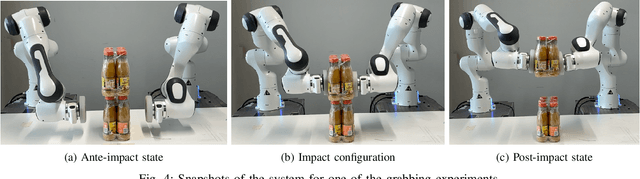
With the goal of increasing the speed and efficiency in robotic manipulation, a control approach is presented that aims to utilize intentional simultaneous impacts to its advantage. This approach exploits the concept of the time-invariant reference spreading framework, in which partly-overlapping ante- and post-impact reference vector fields are used. These vector fields are coupled via an impact model in proximity of the expected impact area, minimizing the otherwise large impact-induced velocity errors and control efforts. We show how a nonsmooth physics engine can be used to construct this impact model for complex scenarios, which warrants applicability to a large range of possible impact states without requiring contact stiffness and damping parameters. In addition, a novel interim-impact control mode provides robustness in the execution against the inevitable lack of exact impact simultaneity and the corresponding unreliable velocity error during the time when contact is only partially established. This interim mode uses a position feedback signal that is derived from the ante-impact velocity reference to promote contact completion, and smoothly transitions into the post-impact mode. An experimental validation of time-invariant reference spreading control is presented for the first time through a set of 600 robotic hit-and-push and dual-arm grabbing experiments.
Impact-Aware Robotic Manipulation: Quantifying the Sim-To-Real Gap for Velocity Jumps
Nov 10, 2024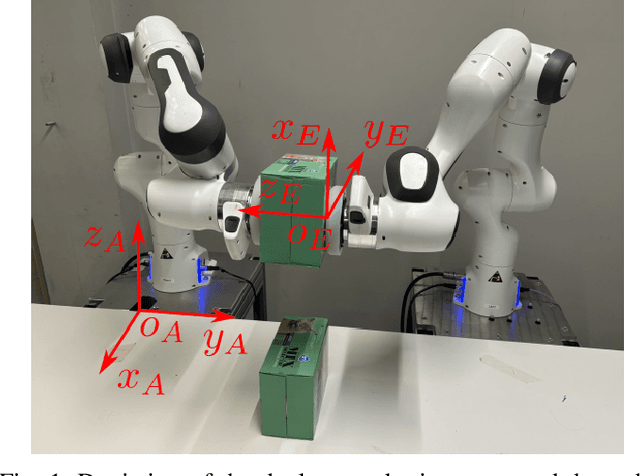
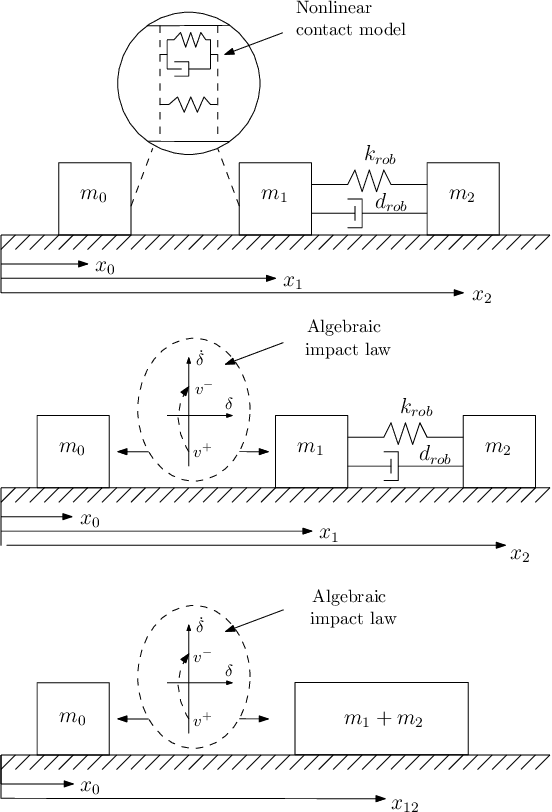
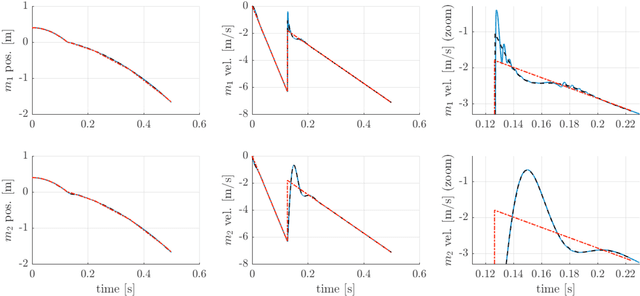
Impact-aware robotic manipulation benefits from an accurate map from ante-impact to post-impact velocity signals to support, e.g., motion planning and control. This work proposes an approach to generate and experimentally validate such impact maps from simulations with a physics engine, allowing to model impact scenarios of arbitrarily large complexity. This impact map captures the velocity jump assuming an instantaneous contact transition between rigid objects, neglecting the nearly instantaneous contact transition and impact-induced vibrations. Feedback control, which is required for complex impact scenarios, will affect velocity signals when these vibrations are still active, making an evaluation solely based on velocity signals as in previous works unreliable. Instead, the proposed validation approach uses the reference spreading control framework, which aims to reduce peaks and jumps in the control feedback signals by using a reference consistent with the rigid impact map together with a suitable control scheme. Based on the key idea that selecting the correct rigid impact map in this reference spreading framework will minimize the net feedback signal, the rigid impact map is experimentally determined and compared with the impact map obtained from simulation, resulting in a 3.1% average error between the post-impact velocity identified from simulations and from experiments.
Quadratic Programming-based Reference Spreading Control for Dual-Arm Robotic Manipulation with Planned Simultaneous Impacts
May 15, 2023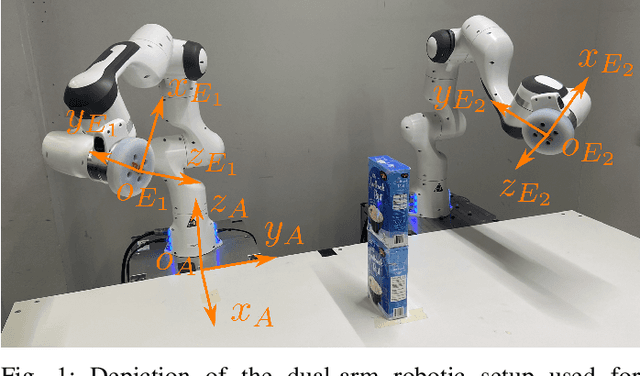
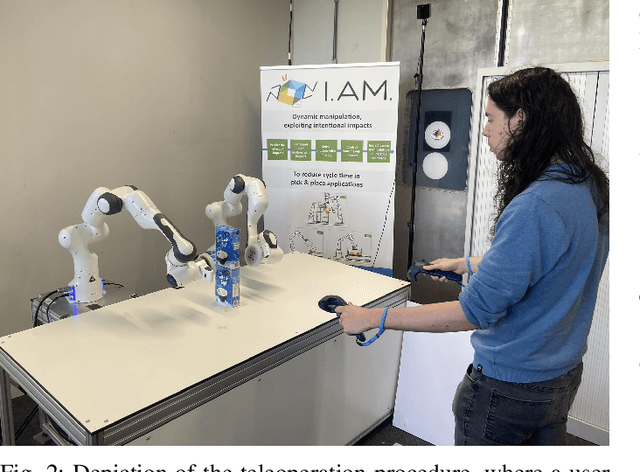
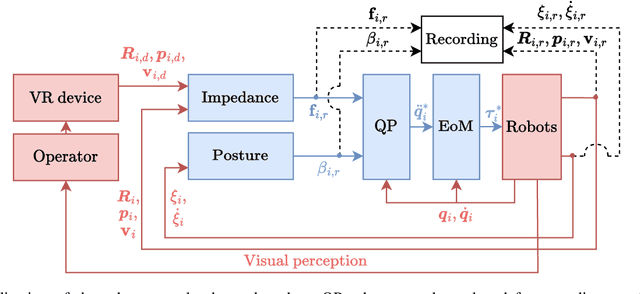
With the aim of further enabling the exploitation of intentional impacts in robotic manipulation, a control framework is presented that directly tackles the challenges posed by tracking control of robotic manipulators that are tasked to perform nominally simultaneous impacts. This framework is an extension of the reference spreading control framework, in which overlapping ante- and post-impact references that are consistent with impact dynamics are defined. In this work, such a reference is constructed starting from a teleoperation-based approach. By using the corresponding ante- and post-impact control modes in the scope of a quadratic programming control approach, peaking of the velocity error and control inputs due to impacts is avoided while maintaining high tracking performance. With the inclusion of a novel interim mode, we aim to also avoid input peaks and steps when uncertainty in the environment causes a series of unplanned single impacts to occur rather than the planned simultaneous impact. This work in particular presents for the first time an experimental evaluation of reference spreading control on a robotic setup, showcasing its robustness against uncertainty in the environment compared to two baseline control approaches.
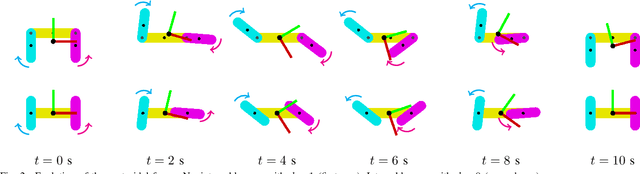
Dual Arm Impact-Aware Grasping through Time-Invariant Reference Spreading Control
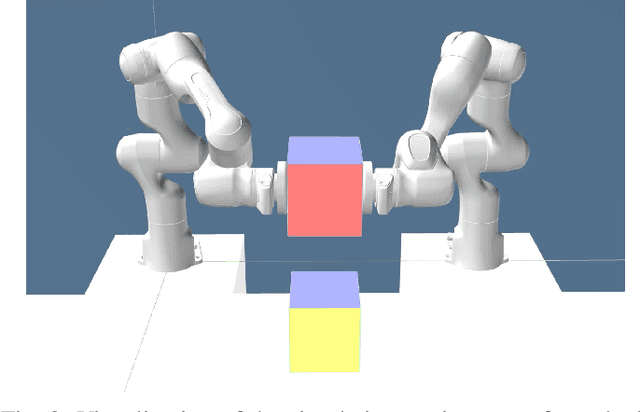
Dec 01, 2022With the goal of increasing the speed and efficiency in robotic dual-arm manipulation, a novel control approach is presented that utilizes intentional simultaneous impacts to rapidly grasp objects. This approach uses the time-invariant reference spreading framework, in which partly-overlapping ante- and post-impact reference vector fields are used. These vector fields are coupled via the impact dynamics in proximity of the expected impact area, minimizing the otherwise large velocity errors after the impact and the corresponding large control efforts. A purely spatial task is introduced to strongly encourage the synchronization of impact times of the two arms. An interim-impact control phase provides robustness in the execution against the inevitable lack of exact impact simultaneity and the corresponding unreliable velocity error. In this interim phase, a position feedback signal is derived from the ante-impact velocity reference, which is used to enforce sustained contact in all contact points without using velocity error feedback. With an eye towards real-life implementation, the approach is formulated using a QP control framework, and is validated using numerical simulations on a realistic robot model with flexible joints and low-level torque control.
Robot Control for Simultaneous Impact Tasks through Time-Invariant Reference Spreading
Jun 10, 2022
With the goal of enabling the exploitation of impacts in robotic manipulation, a new framework is presented for control of robotic manipulators that are tasked to execute nominally simultaneous impacts. In this framework, we employ tracking of time-invariant reference vector fields corresponding to the ante- and post-impact motion, increasing its applicability over similar conventional tracking control approaches. The ante- and post-impact references are coupled through a rigid impact map, and are extended to overlap around the area where the impact is expected to take place, such that the reference corresponding to the actual contact state of the robot can always be followed. As a sequence of impacts at the different contact points will typically occur, resulting in uncertainty of the contact mode and unreliable velocity measurements, a new interim control mode catered towards time-invariant references is formulated. In this mode, a position feedback signal is derived from the ante-impact velocity reference, which is used to enforce sustained contact in all contact points without using velocity feedback. With an eye towards real implementation, the approach is formulated using a QP control framework, and is validated using numerical simulations both on a rigid robot with a hard inelastic contact model and on a realistic robot model with flexible joints and compliant partially elastic contact model.
Efficient Geometric Linearization of Moving-Base Rigid Robot Dynamics
Apr 11, 2022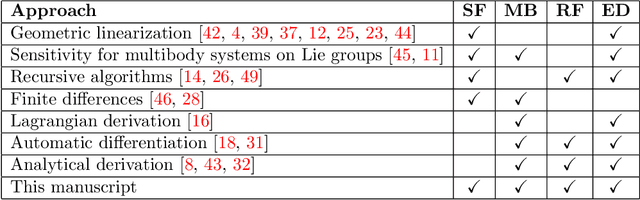
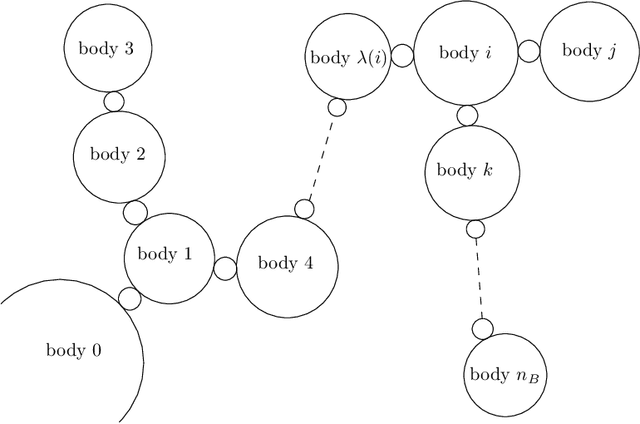
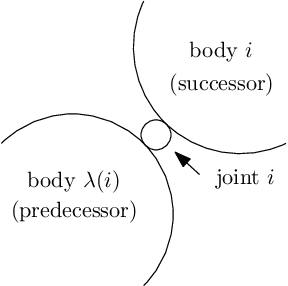
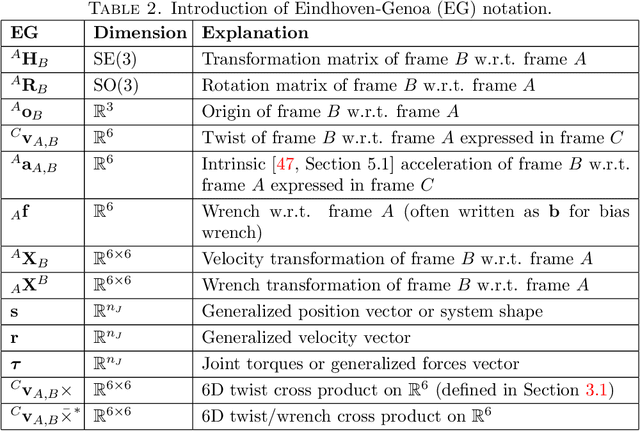
The linearization of the equations of motion of a robotics system about a given state-input trajectory, including a controlled equilibrium state, is a valuable tool for model-based planning, closed-loop control, gain tuning, and state estimation. Contrary to the case of fixed based manipulators with prismatic or rotary joints, the state space of moving-base robotic systems such as humanoids, quadruped robots, or aerial manipulators cannot be globally parametrized by a finite number of independent coordinates. This impossibility is a direct consequence of the fact that the state of these systems includes the system's global orientation, formally described as an element of the special orthogonal group SO(3). As a consequence, obtaining the linearization of the equations of motion for these systems is typically resolved, from a practical perspective, by locally parameterizing the system's attitude by means of, e.g., Euler or Cardan angles. This has the drawback, however, of introducing artificial parameterization singularities and extra derivative computations. In this contribution, we show that it is actually possible to define a notion of linearization that does not require the use of a local parameterization for the system's orientation, obtaining a mathematically elegant, recursive, and singularity-free linearization for moving-based robot systems. Recursiveness, in particular, is obtained by proposing a nontrivial modification of existing recursive algorithms to allow for computations of the geometric derivatives of the inverse dynamics and the inverse of the mass matrix of the robotic system. The correctness of the proposed algorithm is validated by means of a numerical comparison with the result obtained via geometric finite difference.
Robot control for simultaneous impact tasks via QP based reference spreading
Nov 09, 2021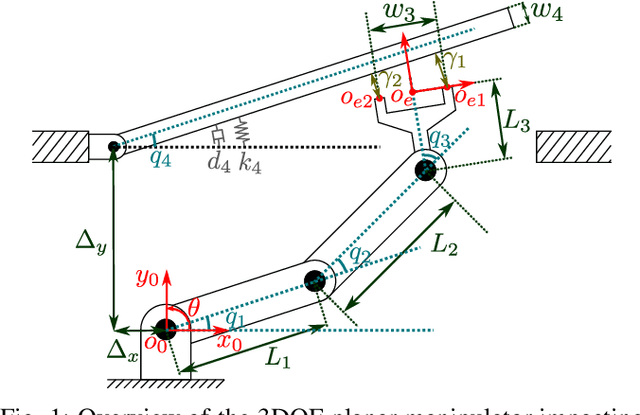
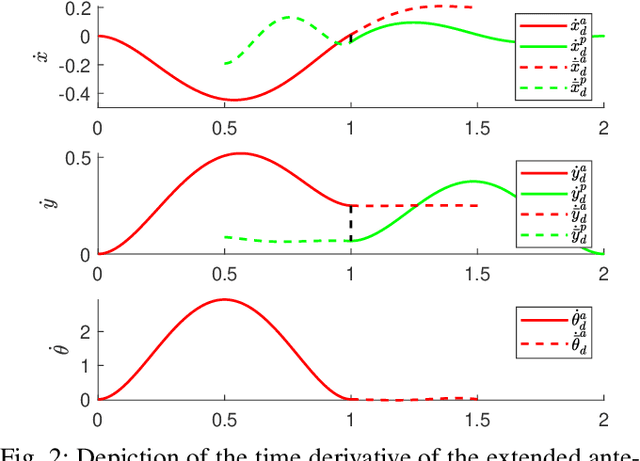
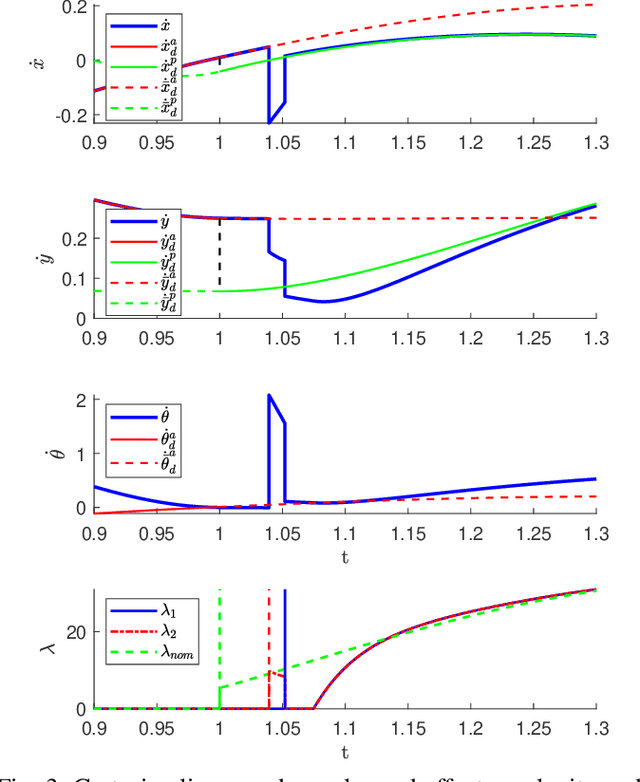
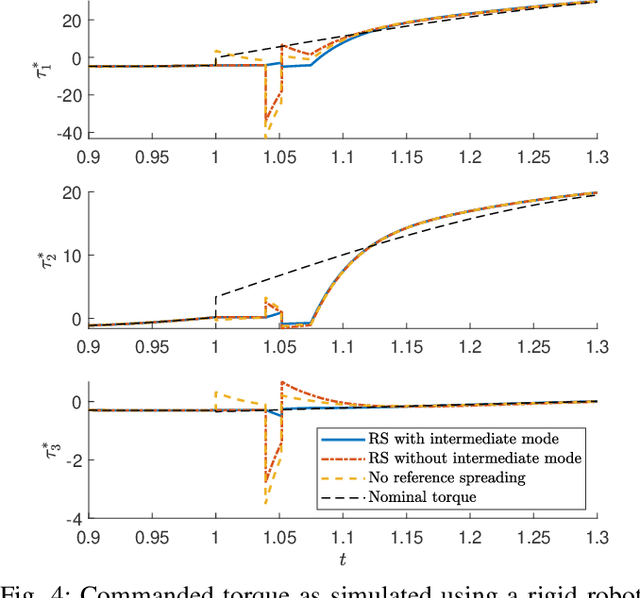
With the aim of further enabling the exploitation of impacts in robotic manipulation, a control framework is presented that directly tackles the challenges posed by tracking control of robotic manipulators that are tasked to perform nominally simultaneous impacts associated to multiple contact points. To this end, we extend the framework of reference spreading, which uses an extended ante- and post-impact reference coherent with a rigid impact map, determined under the assumption of an inelastic simultaneous impact. In practice, the robot will not reside exactly on the reference at the impact moment; as a result a sequence of impacts at the different contact points will typically occur. Our new approach extends reference spreading in this context via the introduction of an additional intermediate control mode. In this mode, a torque command is still based on the ante-impact reference with the goal of reaching the target contact state, but velocity feedback is disabled as this can be potentially harmful due to rapid velocity changes. With an eye towards real implementation, the approach is formulated using a QP control framework and is validated using numerical simulations both on a rigid robot model and on a realistic robot model with flexible joints.
Predicting the Post-Impact Velocity of a Robotic Arm via Rigid Multibody Models: an Experimental Study
Oct 16, 2020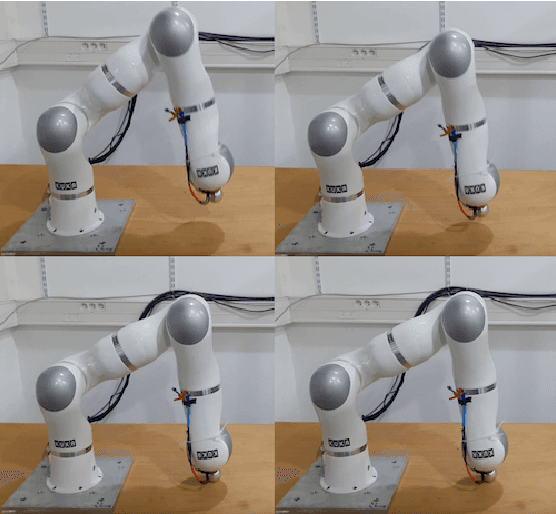
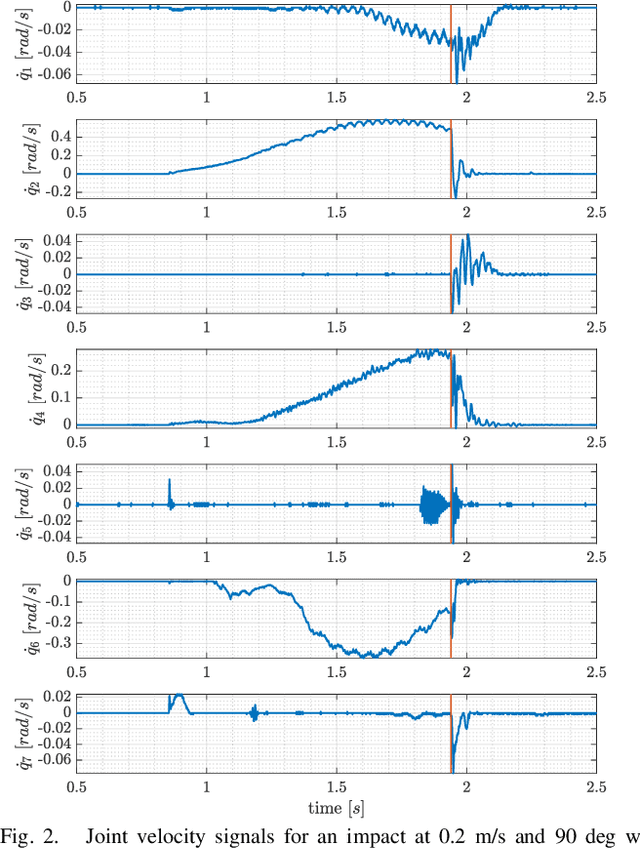
Accurate post-impact velocity predictions are essential in developing impact-aware manipulation strategies for robots, where contacts are intentionally established at non-zero speed mimicking human manipulation abilities in dynamic grasping and pushing of objects. Starting from the recorded dynamic response of a 7DOF torque-controlled robot that intentionally impacts a rigid surface, we investigate the possibility and accuracy of predicting the post-impact robot velocity from the pre-impact velocity and impact configuration. The velocity prediction is obtained by means of an impact map, derived using the framework of nonsmooth mechanics, that makes use of the known rigid-body robot model and the assumption of a frictionless inelastic impact.The main contribution is proposing a methodology that allows for a meaningful quantitative comparison between the recorded post-impact data, that exhibits a damped oscillatory response after the impact, and the post-impact velocity prediction derived via the readily available rigid-body robot model, that presents no oscillations and that is the one typically obtained via mainstream robot simulator software. The results of this new approach are promising in terms of prediction accuracy and thus relevant for the growing field of impact-aware robot control. The recorded impact data (18 experiments) is made publicly available, together with the numerical routines employed to generate the quantitative comparison, to further stimulate interest/research in this field.
On Centroidal Dynamics and Integrability of Average Angular Velocity
Jan 10, 2017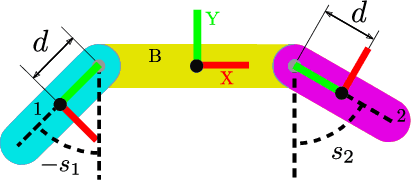
In the literature on robotics and multibody dynamics, the concept of average angular velocity has received considerable attention in recent years. We address the question of whether the average angular velocity defines an orientation framethat depends only on the current robot configuration and provide a simple algebraic condition to check whether this holds. In the language of geometric mechanics, this condition corresponds to requiring the flatness of the mechanical connection associated to the robotic system. Here, however, we provide both a reinterpretation and a proof of this result accessible to readers with a background in rigid body kinematics and multibody dynamics but not necessarily acquainted with differential geometry, still providing precise links to the geometric mechanics literature. This should help spreading the algebraic condition beyond the scope of geometric mechanics,contributing to a proper utilization and understanding of the concept of average angular velocity.