 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration of skill-specific maps from graph world models for robotic systems
Feb 28, 2024



With the increase in the availability of Building Information Models (BIM) and (semi-) automatic tools to generate BIM from point clouds, we propose a world model architecture and algorithms to allow the use of the semantic and geometric knowledge encoded within these models to generate maps for robot localization and navigation. When heterogeneous robots are deployed within an environment, maps obtained from classical SLAM approaches might not be shared between all agents within a team of robots, e.g. due to a mismatch in sensor type, or a difference in physical robot dimensions. Our approach extracts the 3D geometry and semantic description of building elements (e.g. material, element type, color) from BIM, and represents this knowledge in a graph. Based on queries on the graph and knowledge of the skills of the robot, we can generate skill-specific maps that can be used during the execution of localization or navigation tasks. The approach is validated with data from complex build environments and integrated into existing navigation frameworks.
Quadratic Programming-based Reference Spreading Control for Dual-Arm Robotic Manipulation with Planned Simultaneous Impacts
May 15, 2023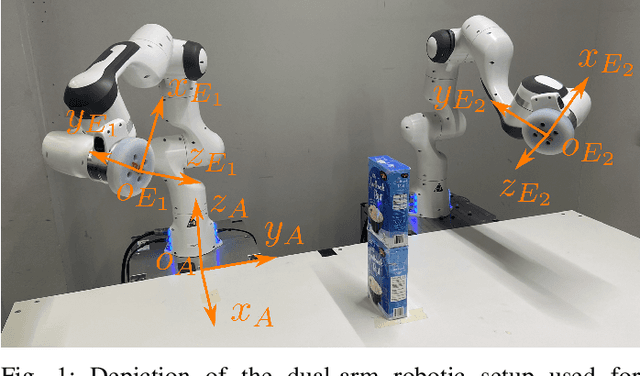
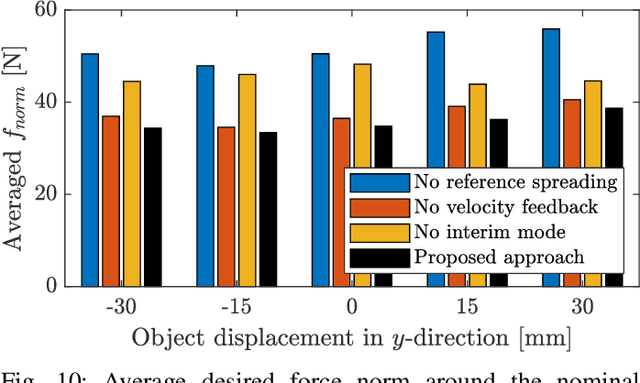
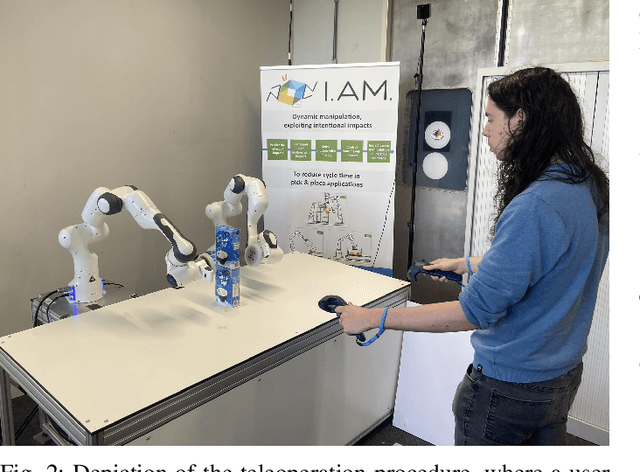
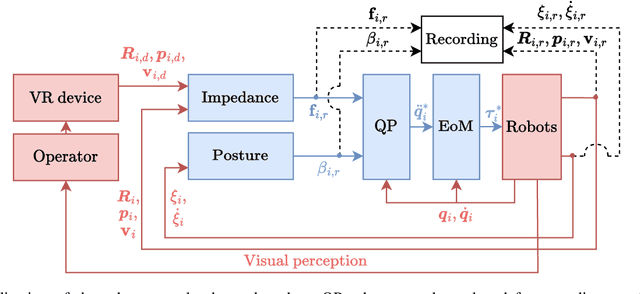
With the aim of further enabling the exploitation of intentional impacts in robotic manipulation, a control framework is presented that directly tackles the challenges posed by tracking control of robotic manipulators that are tasked to perform nominally simultaneous impacts. This framework is an extension of the reference spreading control framework, in which overlapping ante- and post-impact references that are consistent with impact dynamics are defined. In this work, such a reference is constructed starting from a teleoperation-based approach. By using the corresponding ante- and post-impact control modes in the scope of a quadratic programming control approach, peaking of the velocity error and control inputs due to impacts is avoided while maintaining high tracking performance. With the inclusion of a novel interim mode, we aim to also avoid input peaks and steps when uncertainty in the environment causes a series of unplanned single impacts to occur rather than the planned simultaneous impact. This work in particular presents for the first time an experimental evaluation of reference spreading control on a robotic setup, showcasing its robustness against uncertainty in the environment compared to two baseline control approaches.