 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact-Aware Control using Time-Invariant Reference Spreading
Nov 15, 2024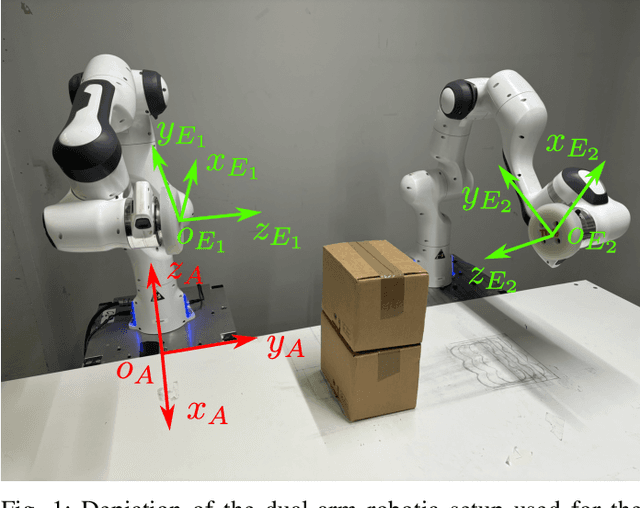
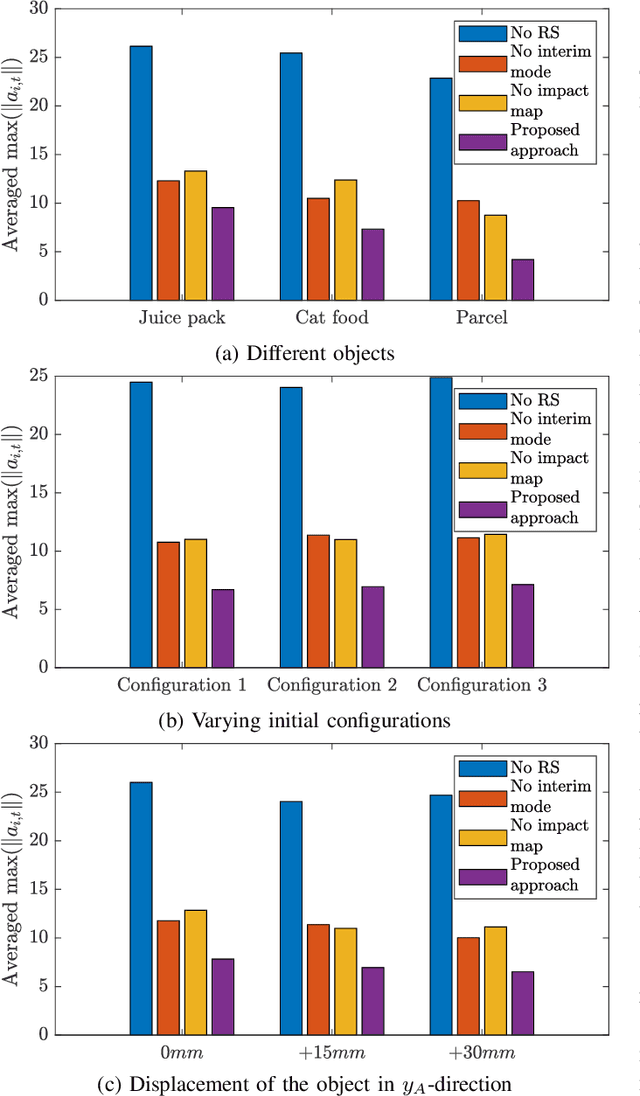
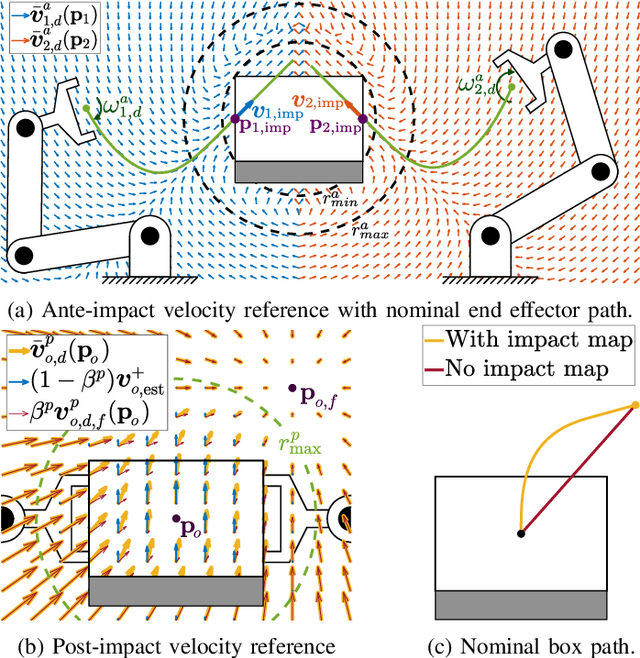
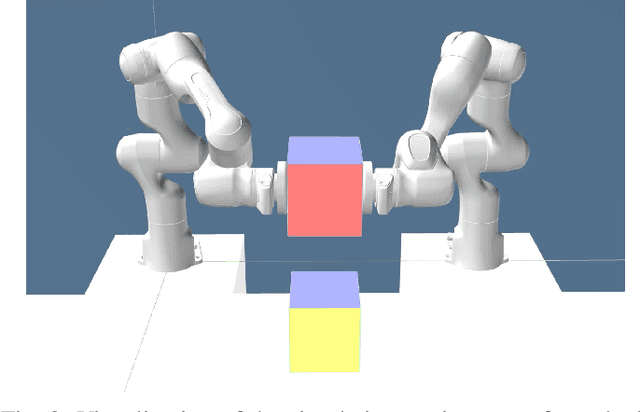
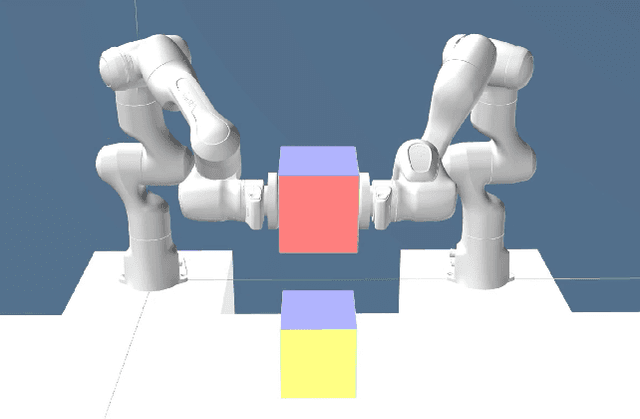
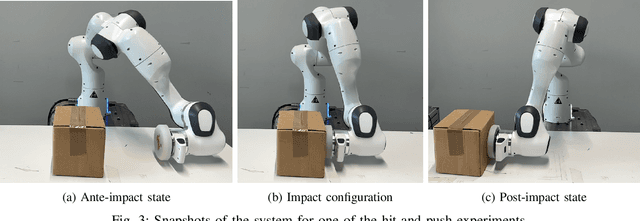
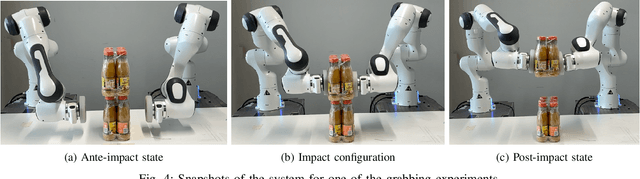
With the goal of increasing the speed and efficiency in robotic manipulation, a control approach is presented that aims to utilize intentional simultaneous impacts to its advantage. This approach exploits the concept of the time-invariant reference spreading framework, in which partly-overlapping ante- and post-impact reference vector fields are used. These vector fields are coupled via an impact model in proximity of the expected impact area, minimizing the otherwise large impact-induced velocity errors and control efforts. We show how a nonsmooth physics engine can be used to construct this impact model for complex scenarios, which warrants applicability to a large range of possible impact states without requiring contact stiffness and damping parameters. In addition, a novel interim-impact control mode provides robustness in the execution against the inevitable lack of exact impact simultaneity and the corresponding unreliable velocity error during the time when contact is only partially established. This interim mode uses a position feedback signal that is derived from the ante-impact velocity reference to promote contact completion, and smoothly transitions into the post-impact mode. An experimental validation of time-invariant reference spreading control is presented for the first time through a set of 600 robotic hit-and-push and dual-arm grabbing experiments.
Impact-Aware Robotic Manipulation: Quantifying the Sim-To-Real Gap for Velocity Jumps
Nov 10, 2024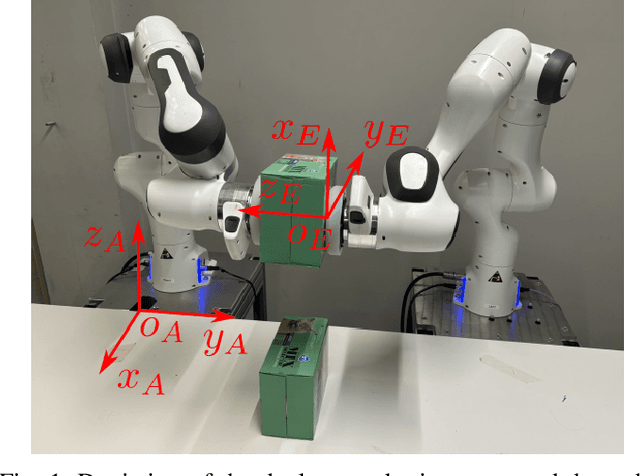
Impact-aware robotic manipulation benefits from an accurate map from ante-impact to post-impact velocity signals to support, e.g., motion planning and control. This work proposes an approach to generate and experimentally validate such impact maps from simulations with a physics engine, allowing to model impact scenarios of arbitrarily large complexity. This impact map captures the velocity jump assuming an instantaneous contact transition between rigid objects, neglecting the nearly instantaneous contact transition and impact-induced vibrations. Feedback control, which is required for complex impact scenarios, will affect velocity signals when these vibrations are still active, making an evaluation solely based on velocity signals as in previous works unreliable. Instead, the proposed validation approach uses the reference spreading control framework, which aims to reduce peaks and jumps in the control feedback signals by using a reference consistent with the rigid impact map together with a suitable control scheme. Based on the key idea that selecting the correct rigid impact map in this reference spreading framework will minimize the net feedback signal, the rigid impact map is experimentally determined and compared with the impact map obtained from simulation, resulting in a 3.1% average error between the post-impact velocity identified from simulations and from experiments.
Quadratic Programming-based Reference Spreading Control for Dual-Arm Robotic Manipulation with Planned Simultaneous Impacts
May 15, 2023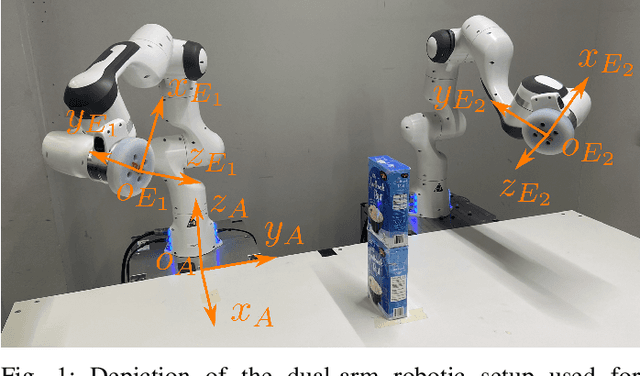
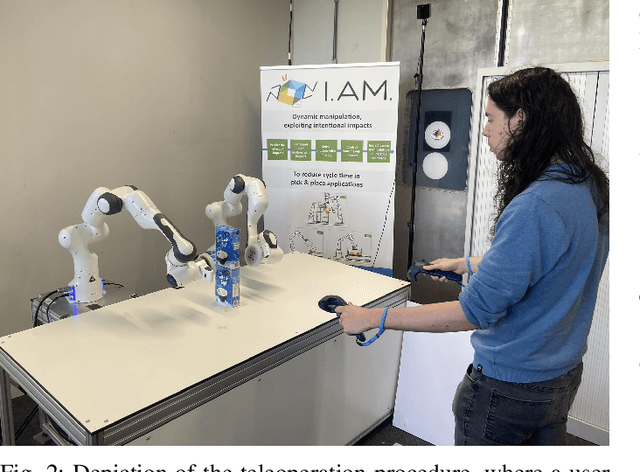
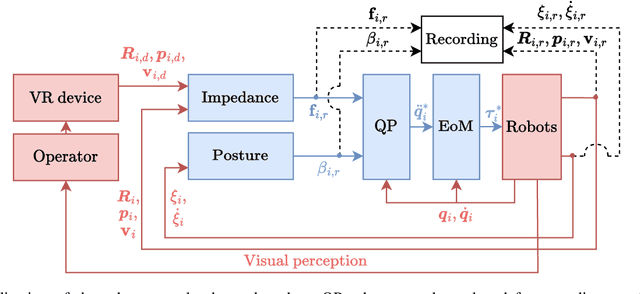
With the aim of further enabling the exploitation of intentional impacts in robotic manipulation, a control framework is presented that directly tackles the challenges posed by tracking control of robotic manipulators that are tasked to perform nominally simultaneous impacts. This framework is an extension of the reference spreading control framework, in which overlapping ante- and post-impact references that are consistent with impact dynamics are defined. In this work, such a reference is constructed starting from a teleoperation-based approach. By using the corresponding ante- and post-impact control modes in the scope of a quadratic programming control approach, peaking of the velocity error and control inputs due to impacts is avoided while maintaining high tracking performance. With the inclusion of a novel interim mode, we aim to also avoid input peaks and steps when uncertainty in the environment causes a series of unplanned single impacts to occur rather than the planned simultaneous impact. This work in particular presents for the first time an experimental evaluation of reference spreading control on a robotic setup, showcasing its robustness against uncertainty in the environment compared to two baseline control approaches.