 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot control for simultaneous impact tasks via QP based reference spreading
Paper and Code
Nov 09, 2021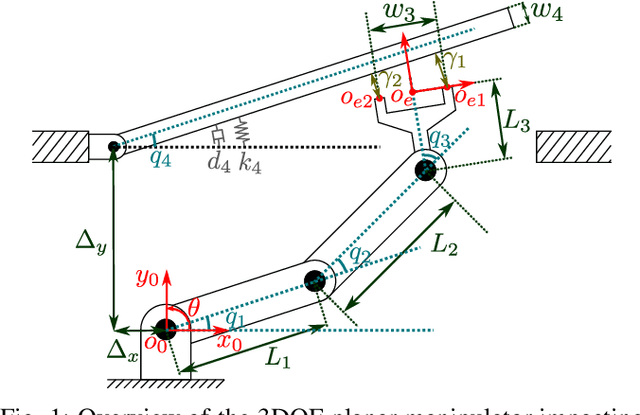
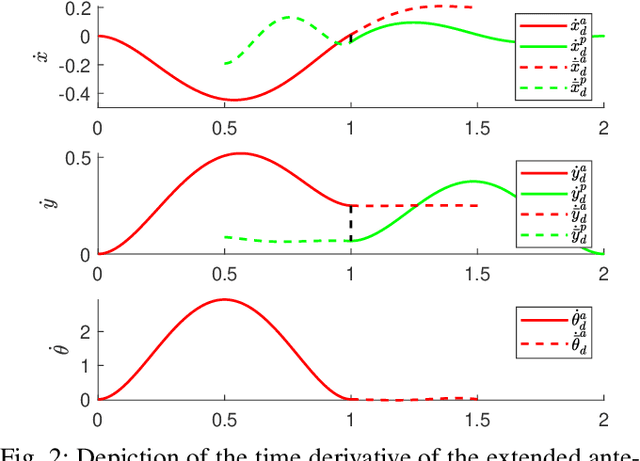
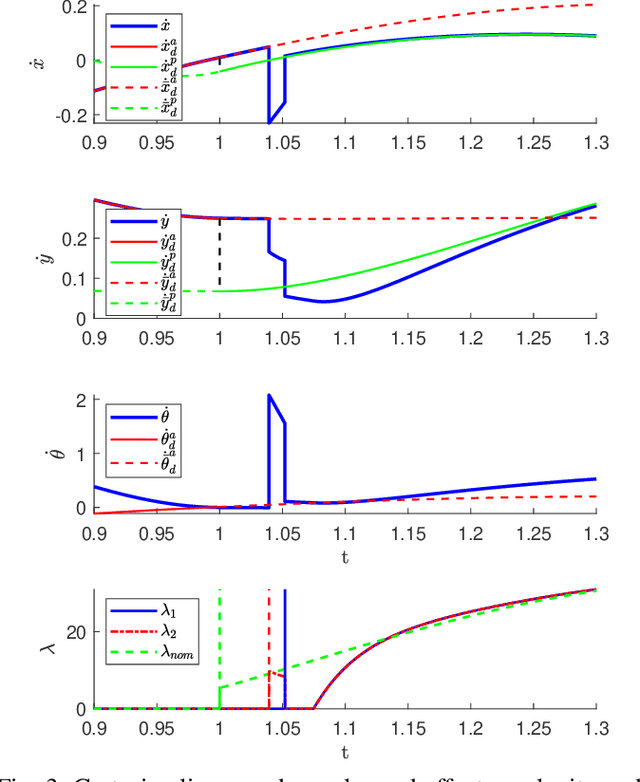
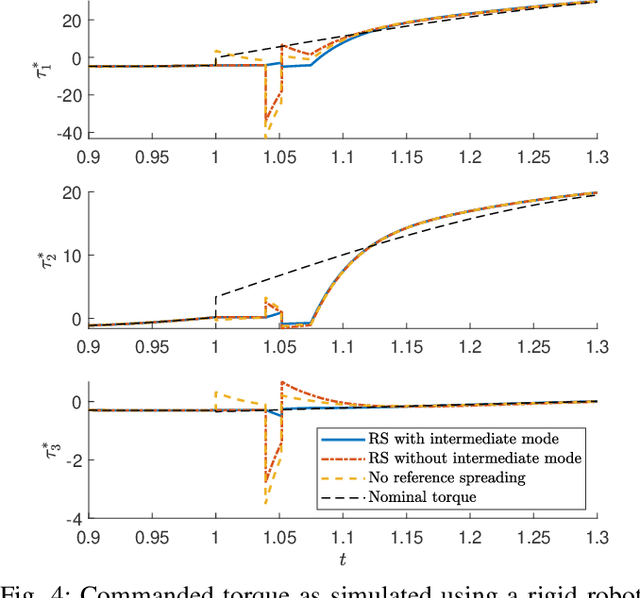
With the aim of further enabling the exploitation of impacts in robotic manipulation, a control framework is presented that directly tackles the challenges posed by tracking control of robotic manipulators that are tasked to perform nominally simultaneous impacts associated to multiple contact points. To this end, we extend the framework of reference spreading, which uses an extended ante- and post-impact reference coherent with a rigid impact map, determined under the assumption of an inelastic simultaneous impact. In practice, the robot will not reside exactly on the reference at the impact moment; as a result a sequence of impacts at the different contact points will typically occur. Our new approach extends reference spreading in this context via the introduction of an additional intermediate control mode. In this mode, a torque command is still based on the ante-impact reference with the goal of reaching the target contact state, but velocity feedback is disabled as this can be potentially harmful due to rapid velocity changes. With an eye towards real implementation, the approach is formulated using a QP control framework and is validated using numerical simulations both on a rigid robot model and on a realistic robot model with flexible joints.