 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Arm Impact-Aware Grasping through Time-Invariant Reference Spreading Control
Dec 01, 2022With the goal of increasing the speed and efficiency in robotic dual-arm manipulation, a novel control approach is presented that utilizes intentional simultaneous impacts to rapidly grasp objects. This approach uses the time-invariant reference spreading framework, in which partly-overlapping ante- and post-impact reference vector fields are used. These vector fields are coupled via the impact dynamics in proximity of the expected impact area, minimizing the otherwise large velocity errors after the impact and the corresponding large control efforts. A purely spatial task is introduced to strongly encourage the synchronization of impact times of the two arms. An interim-impact control phase provides robustness in the execution against the inevitable lack of exact impact simultaneity and the corresponding unreliable velocity error. In this interim phase, a position feedback signal is derived from the ante-impact velocity reference, which is used to enforce sustained contact in all contact points without using velocity error feedback. With an eye towards real-life implementation, the approach is formulated using a QP control framework, and is validated using numerical simulations on a realistic robot model with flexible joints and low-level torque control.
Robot Control for Simultaneous Impact Tasks through Time-Invariant Reference Spreading
Jun 10, 2022
With the goal of enabling the exploitation of impacts in robotic manipulation, a new framework is presented for control of robotic manipulators that are tasked to execute nominally simultaneous impacts. In this framework, we employ tracking of time-invariant reference vector fields corresponding to the ante- and post-impact motion, increasing its applicability over similar conventional tracking control approaches. The ante- and post-impact references are coupled through a rigid impact map, and are extended to overlap around the area where the impact is expected to take place, such that the reference corresponding to the actual contact state of the robot can always be followed. As a sequence of impacts at the different contact points will typically occur, resulting in uncertainty of the contact mode and unreliable velocity measurements, a new interim control mode catered towards time-invariant references is formulated. In this mode, a position feedback signal is derived from the ante-impact velocity reference, which is used to enforce sustained contact in all contact points without using velocity feedback. With an eye towards real implementation, the approach is formulated using a QP control framework, and is validated using numerical simulations both on a rigid robot with a hard inelastic contact model and on a realistic robot model with flexible joints and compliant partially elastic contact model.
Robot control for simultaneous impact tasks via QP based reference spreading
Nov 09, 2021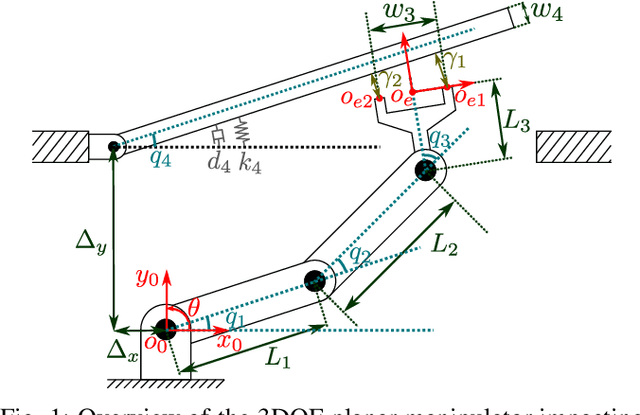
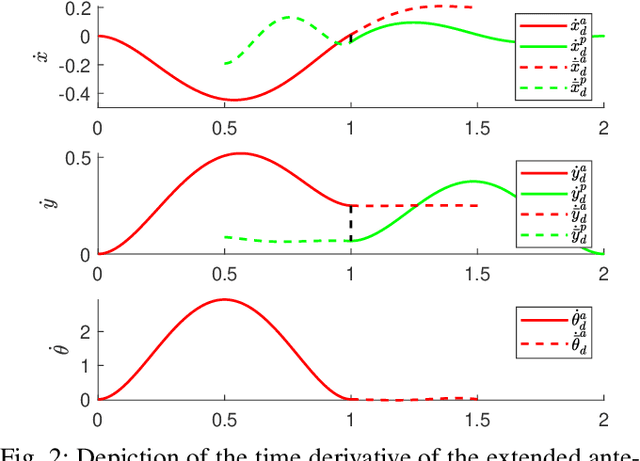
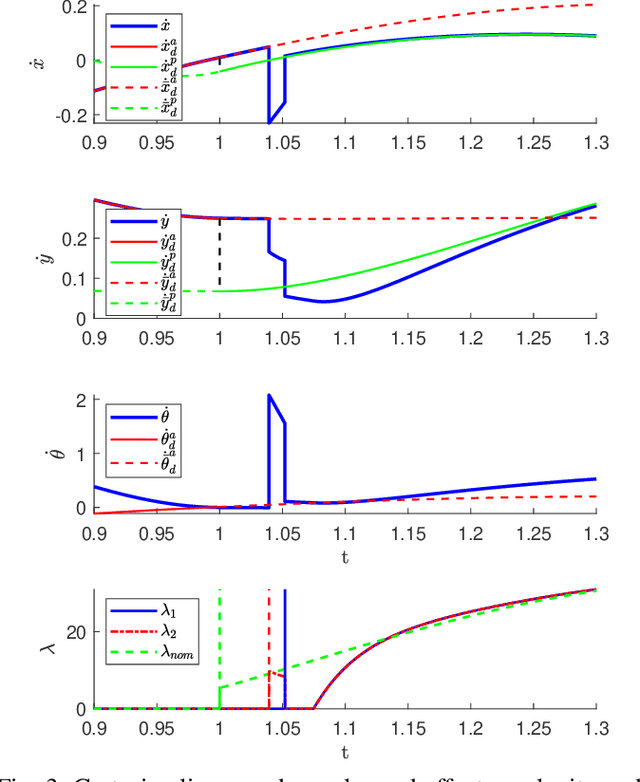
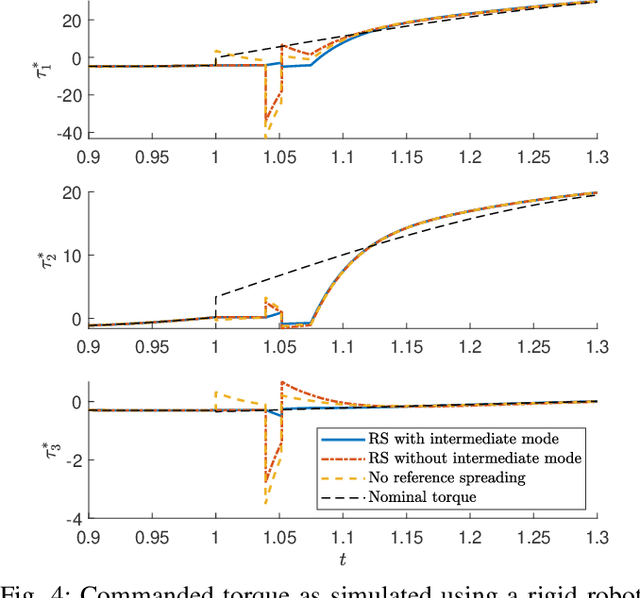
With the aim of further enabling the exploitation of impacts in robotic manipulation, a control framework is presented that directly tackles the challenges posed by tracking control of robotic manipulators that are tasked to perform nominally simultaneous impacts associated to multiple contact points. To this end, we extend the framework of reference spreading, which uses an extended ante- and post-impact reference coherent with a rigid impact map, determined under the assumption of an inelastic simultaneous impact. In practice, the robot will not reside exactly on the reference at the impact moment; as a result a sequence of impacts at the different contact points will typically occur. Our new approach extends reference spreading in this context via the introduction of an additional intermediate control mode. In this mode, a torque command is still based on the ante-impact reference with the goal of reaching the target contact state, but velocity feedback is disabled as this can be potentially harmful due to rapid velocity changes. With an eye towards real implementation, the approach is formulated using a QP control framework and is validated using numerical simulations both on a rigid robot model and on a realistic robot model with flexible joints.