 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructural Controllability of Large-Scale Hypergraphs
Mar 20, 2026Controlling real-world networked systems, including ecological, biomedical, and engineered networks that exhibit higher-order interactions, remains challenging due to inherent nonlinearities and large system scales. Despite extensive studies on graph controllability, the controllability properties of hypergraphs remain largely underdeveloped. Existing results focus primarily on exact controllability, which is often impractical for large-scale hypergraphs. In this article, we develop a structural controllability framework for hypergraphs by modeling hypergraph dynamics as polynomial dynamical systems. In particular, we extend classical notions of accessibility and dilation from linear graph-based systems to polynomial hypergraph dynamics and establish a hypergraph-based criterion under which the topology guarantees satisfaction of classical Lie-algebraic and Kalman-type rank conditions for almost all parameter choices. We further derive a topology-based lower bound on the minimum number of driver nodes required for structural controllability and leverage this bound to design a scalable driver node selection algorithm combining dilation-aware initialization via maximum matching with greedy accessibility expansion. We demonstrate the effectiveness and scalability of the proposed framework through numerical experiments on hypergraphs with tens to thousands of nodes and higher-order interactions.
Bioinformatics Retrieval Augmentation Data (BRAD) Digital Assistant
Sep 04, 2024We present a prototype for a Bioinformatics Retrieval Augmentation Data (BRAD) digital assistant. BRAD integrates a suite of tools to handle a wide range of bioinformatics tasks, from code execution to online search. We demonstrate BRAD's capabilities through (1) improved question-and-answering with retrieval augmented generation (RAG), (2) BRAD's ability to run and write complex software pipelines, and (3) BRAD's ability to organize and distribute tasks across individual and teams of agents. We use BRAD for automation of bioinformatics workflows, performing tasks ranging from gene enrichment and searching the archive to automatic code generation and running biomarker identification pipelines. BRAD is a step toward the ultimate goal to develop a digital twin of laboratories driven by self-contained loops for hypothesis generation and testing of digital biology experiments.
TransferD2: Automated Defect Detection Approach in Smart Manufacturing using Transfer Learning Techniques
Feb 26, 2023Quality assurance is crucial in the smart manufacturing industry as it identifies the presence of defects in finished products before they are shipped out. Modern machine learning techniques can be leveraged to provide rapid and accurate detection of these imperfections. We, therefore, propose a transfer learning approach, namely TransferD2, to correctly identify defects on a dataset of source objects and extend its application to new unseen target objects. We present a data enhancement technique to generate a large dataset from the small source dataset for building a classifier. We then integrate three different pre-trained models (Xception, ResNet101V2, and InceptionResNetV2) into the classifier network and compare their performance on source and target data. We use the classifier to detect the presence of imperfections on the unseen target data using pseudo-bounding boxes. Our results show that ResNet101V2 performs best on the source data with an accuracy of 95.72%. Xception performs best on the target data with an accuracy of 91.00% and also provides a more accurate prediction of the defects on the target images. Throughout the experiment, the results also indicate that the choice of a pre-trained model is not dependent on the depth of the network. Our proposed approach can be applied in defect detection applications where insufficient data is available for training a model and can be extended to identify imperfections in new unseen data.
Fault Detection in Ball Bearings
Sep 19, 2022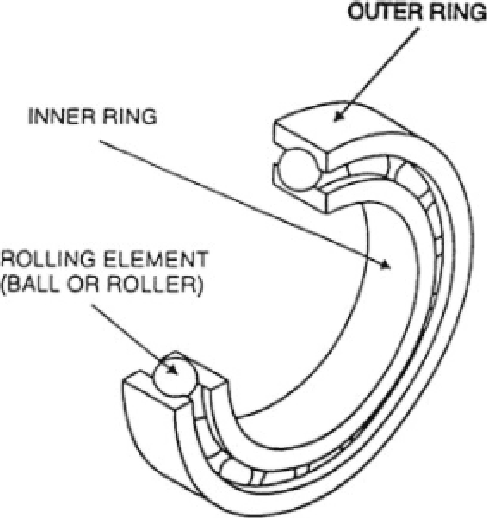
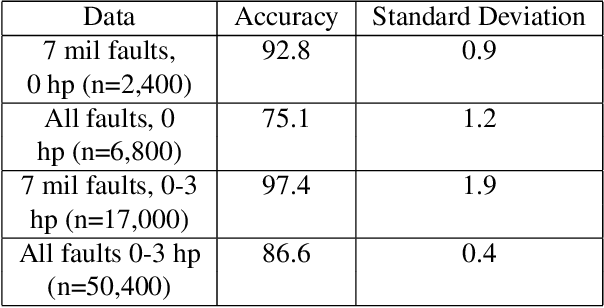
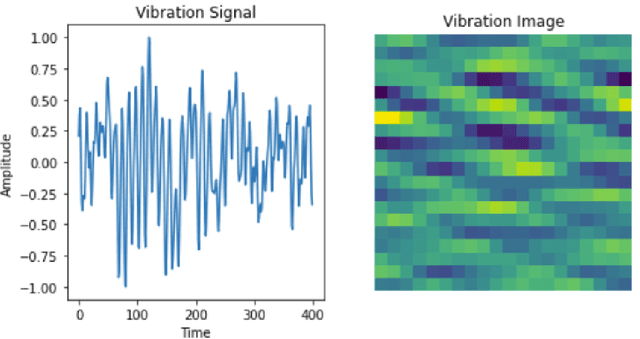
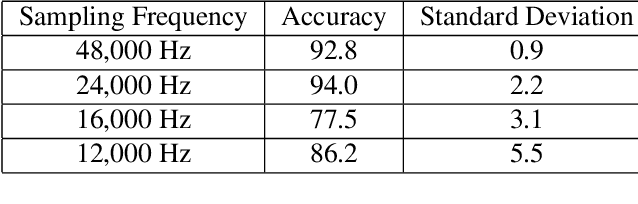
Ball bearing joints are a critical component in all rotating machinery, and detecting and locating faults in these joints is a significant problem in industry and research. Intelligent fault detection (IFD) is the process of applying machine learning and other statistical methods to monitor the health states of machines. This paper explores the construction of vibration images, a preprocessing technique that has been previously used to train convolutional neural networks for ball bearing joint IFD. The main results demonstrate the robustness of this technique by applying it to a larger dataset than previously used and exploring the hyperparameters used in constructing the vibration images.
Efficient Set-Based Approaches for the Reliable Computation of Robot Capabilities
Apr 01, 2021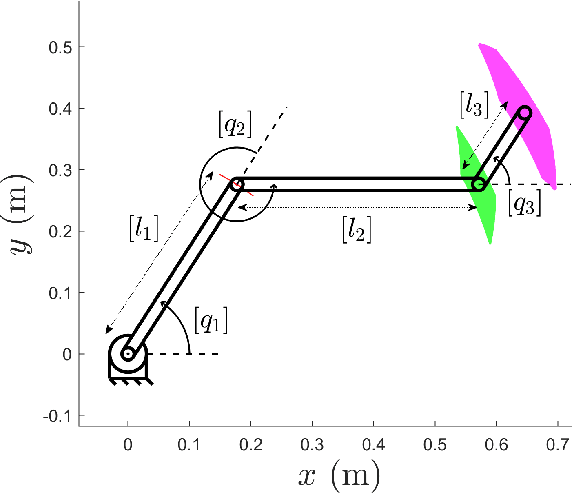
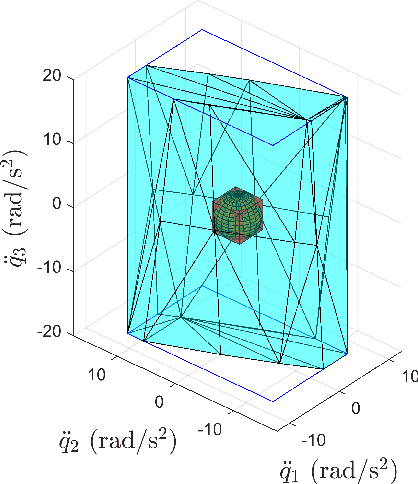
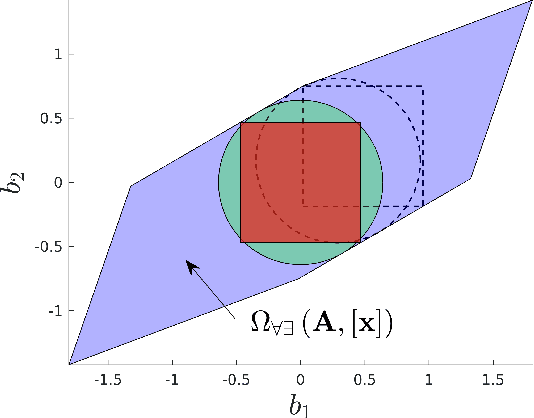
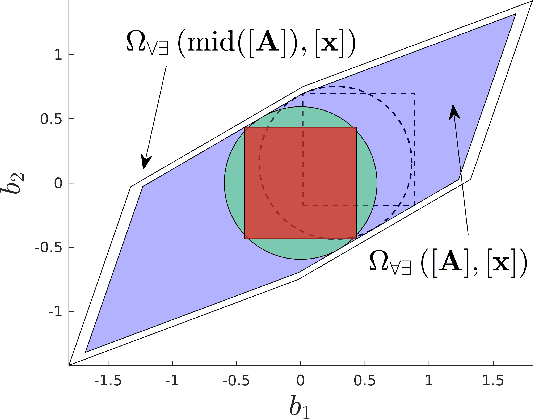
To reliably model real robot characteristics, interval linear systems of equations allow to describe families of problems that consider sets of values. This allows to easily account for typical complexities such as sets of joint states and design parameter uncertainties. Inner approximations of the solutions to the interval linear systems can be used to describe the common capabilities of a robotic manipulator corresponding to the considered sets of values. In this work, several classes of problems are considered. For each class, reliable and efficient polytope, n-cube, and n-ball inner approximations are presented. The interval approaches usually proposed are inefficient because they are too computationally heavy for certain applications, such as control. We propose efficient new inner approximation theorems for the considered classes of problems. This allows for usage with real-time applications as well as rapid analysis of potential designs. Several applications are presented for a redundant planar manipulator including locally evaluating the manipulator's velocity, acceleration, and static force capabilities, and evaluating its future acceleration capabilities over a given time horizon.