 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoss Landscape Analysis for Reliable Quantized ML Models for Scientific Sensing
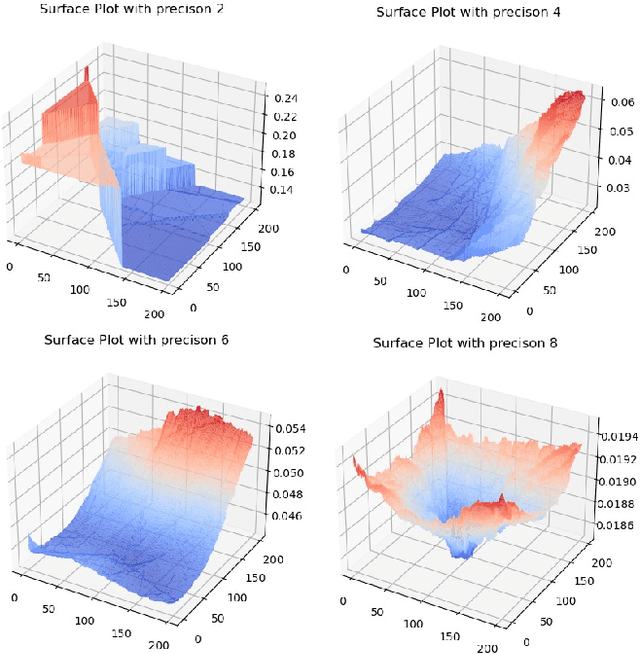
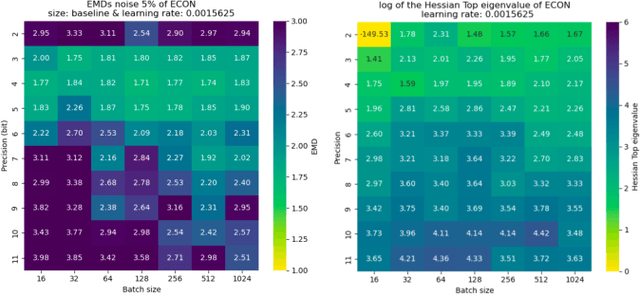
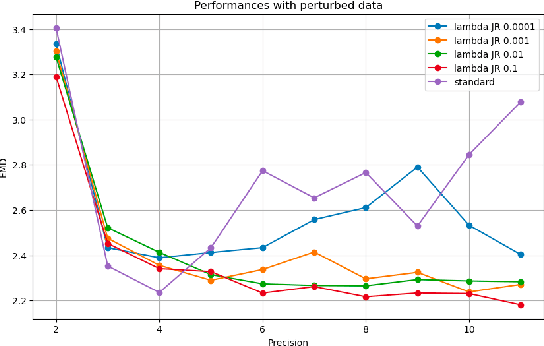
Feb 12, 2025In this paper, we propose a method to perform empirical analysis of the loss landscape of machine learning (ML) models. The method is applied to two ML models for scientific sensing, which necessitates quantization to be deployed and are subject to noise and perturbations due to experimental conditions. Our method allows assessing the robustness of ML models to such effects as a function of quantization precision and under different regularization techniques -- two crucial concerns that remained underexplored so far. By investigating the interplay between performance, efficiency, and robustness by means of loss landscape analysis, we both established a strong correlation between gently-shaped landscapes and robustness to input and weight perturbations and observed other intriguing and non-obvious phenomena. Our method allows a systematic exploration of such trade-offs a priori, i.e., without training and testing multiple models, leading to more efficient development workflows. This work also highlights the importance of incorporating robustness into the Pareto optimization of ML models, enabling more reliable and adaptive scientific sensing systems.
Edge-Only Universal Adversarial Attacks in Distributed Learning
Nov 15, 2024



Distributed learning frameworks, which partition neural network models across multiple computing nodes, enhance efficiency in collaborative edge-cloud systems but may also introduce new vulnerabilities. In this work, we explore the feasibility of generating universal adversarial attacks when an attacker has access to the edge part of the model only, which consists in the first network layers. Unlike traditional universal adversarial perturbations (UAPs) that require full model knowledge, our approach shows that adversaries can induce effective mispredictions in the unknown cloud part by leveraging key features on the edge side. Specifically, we train lightweight classifiers from intermediate features available at the edge, i.e., before the split point, and use them in a novel targeted optimization to craft effective UAPs. Our results on ImageNet demonstrate strong attack transferability to the unknown cloud part. Additionally, we analyze the capability of an attacker to achieve targeted adversarial effect with edge-only knowledge, revealing intriguing behaviors. By introducing the first adversarial attacks with edge-only knowledge in split inference, this work underscores the importance of addressing partial model access in adversarial robustness, encouraging further research in this area.
Reliable edge machine learning hardware for scientific applications
Jun 27, 2024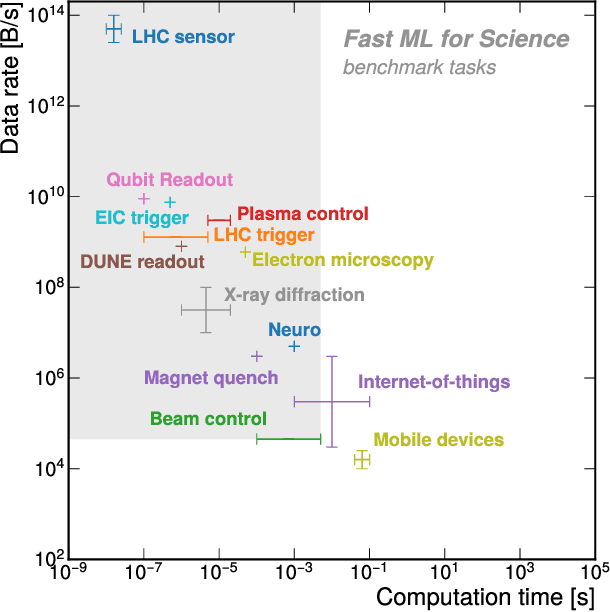
Extreme data rate scientific experiments create massive amounts of data that require efficient ML edge processing. This leads to unique validation challenges for VLSI implementations of ML algorithms: enabling bit-accurate functional simulations for performance validation in experimental software frameworks, verifying those ML models are robust under extreme quantization and pruning, and enabling ultra-fine-grained model inspection for efficient fault tolerance. We discuss approaches to developing and validating reliable algorithms at the scientific edge under such strict latency, resource, power, and area requirements in extreme experimental environments. We study metrics for developing robust algorithms, present preliminary results and mitigation strategies, and conclude with an outlook of these and future directions of research towards the longer-term goal of developing autonomous scientific experimentation methods for accelerated scientific discovery.