 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePairedGTA: Generating Driving Datasets for Controlled Photometric Shift Analysis
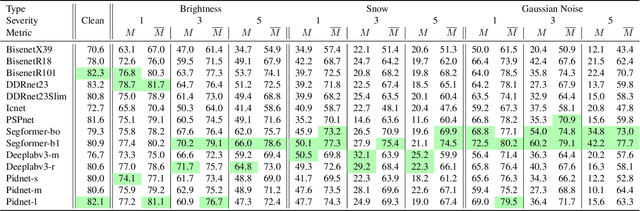
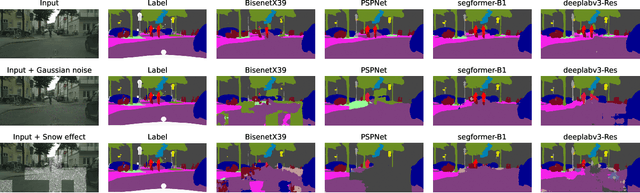
May 31, 2026Evaluating the performance of visual perception systems for autonomous driving is essential to ensure reliable operation across diverse environmental scenarios. Ideally, a balanced and fair analysis across different adverse conditions would require perfectly paired images of the same scene under different weather or illumination changes. This would allow evaluating the effect of photometric shifts independently of geometry and semantic changes. Unfortunately, real-world datasets rarely provide images of the same scene under different environmental conditions, because, normally, camera pose, traffic, and locations of dynamic objects (vehicles, pedestrians, etc.) vary over time, thus yielding only coarsely paired data. To address this challenge, this work introduces a data generation framework based on a high-fidelity game engine for extracting perfectly paired images. By leveraging software APIs that communicate with the GTA game engine, the framework modifies illumination and weather conditions while preserving scene geometry, camera pose, and the identity and placement of dynamic objects. For each sampled location, it procedurally instantiates dynamic entities and renders pixel-aligned images under diverse adverse conditions. The benefit of the proposed generation framework in driving scenarios is demonstrated through a systematic analysis of semantic segmentation models, whose output degradation can be attributed more directly to photometric shifts rather than to uncontrolled semantic or geometric factors.
Integrating Object Detection, LiDAR-Enhanced Depth Estimation, and Segmentation Models for Railway Environments
Apr 16, 2026Obstacle detection in railway environments is crucial for ensuring safety. However, very few studies address the problem using a complete, modular, and flexible system that can both detect objects in the scene and estimate their distance from the vehicle. Most works focus solely on detection, others attempt to identify the track, and only a few estimate obstacle distances. Additionally, evaluating these systems is challenging due to the lack of ground truth data. In this paper, we propose a modular and flexible framework that identifies the rail track, detects potential obstacles, and estimates their distance by integrating three neural networks for object detection, track segmentation, and monocular depth estimation with LiDAR point clouds. To enable a reliable and quantitative evaluation, the proposed framework is assessed using a synthetic dataset (SynDRA), which provides accurate ground truth annotations, allowing for direct performance comparison with existing methods. The proposed system achieves a mean absolute error (MAE) as low as 0.63 meters by integrating monocular depth maps with LiDAR, enabling not only accurate distance estimates but also spatial perception of the scene.
Learning Robustness at Test-Time from a Non-Robust Teacher
Apr 13, 2026Nowadays, pretrained models are increasingly used as general-purpose backbones and adapted at test-time to downstream environments where target data are scarce and unlabeled. While this paradigm has proven effective for improving clean accuracy on the target domain, adversarial robustness has received far less attention, especially when the original pretrained model is not explicitly designed to be robust. This raises a practical question: \emph{can a pretrained, non-robust model be adapted at test-time to improve adversarial robustness on a target distribution?} To face this question, this work studies how adversarial training strategies behave when integrated into adaptation schemes for the unsupervised test-time setting, where only a small set of unlabeled target samples is available. It first analyzes how classical adversarial training formulations can be extended to this scenario, showing that straightforward distillation-based adaptations remain unstable and highly sensitive to hyperparameter tuning, particularly when the teacher itself is non-robust. To address these limitations, the work proposes a label-free framework that uses the predictions of a non-robust teacher model as a semantic anchor for both the clean and adversarial objectives during adaptation. We further provide theoretical insights showing that our formulation yields a more stable alternative to the self-consistency-based regularization commonly used in classical adversarial training. Experiments evaluate the proposed approach on CIFAR-10 and ImageNet under induced photometric transformations. The results support the theoretical insights by showing that the proposed approach achieves improved optimization stability, lower sensitivity to parameter choices, and a better robustness-accuracy trade-off than existing baselines in this post-deployment test-time setting.
OSDaR-AR: Enhancing Railway Perception Datasets via Multi-modal Augmented Reality
Feb 26, 2026Although deep learning has significantly advanced the perception capabilities of intelligent transportation systems, railway applications continue to suffer from a scarcity of high-quality, annotated data for safety-critical tasks like obstacle detection. While photorealistic simulators offer a solution, they often struggle with the ``sim-to-real" gap; conversely, simple image-masking techniques lack the spatio-temporal coherence required to obtain augmented single- and multi-frame scenes with the correct appearance and dimensions. This paper introduces a multi-modal augmented reality framework designed to bridge this gap by integrating photorealistic virtual objects into real-world railway sequences from the OSDaR23 dataset. Utilizing Unreal Engine 5 features, our pipeline leverages LiDAR point-clouds and INS/GNSS data to ensure accurate object placement and temporal stability across RGB frames. This paper also proposes a segmentation-based refinement strategy for INS/GNSS data to significantly improve the realism of the augmented sequences, as confirmed by the comparative study presented in the paper. Carefully designed augmented sequences are collected to produce OSDaR-AR, a public dataset designed to support the development of next-generation railway perception systems. The dataset is available at the following page: https://syndra.retis.santannapisa.it/osdarar.html
Towards Railway Domain Adaptation for LiDAR-based 3D Detection: Road-to-Rail and Sim-to-Real via SynDRA-BBox
Jul 22, 2025In recent years, interest in automatic train operations has significantly increased. To enable advanced functionalities, robust vision-based algorithms are essential for perceiving and understanding the surrounding environment. However, the railway sector suffers from a lack of publicly available real-world annotated datasets, making it challenging to test and validate new perception solutions in this domain. To address this gap, we introduce SynDRA-BBox, a synthetic dataset designed to support object detection and other vision-based tasks in realistic railway scenarios. To the best of our knowledge, is the first synthetic dataset specifically tailored for 2D and 3D object detection in the railway domain, the dataset is publicly available at https://syndra.retis.santannapisa.it. In the presented evaluation, a state-of-the-art semi-supervised domain adaptation method, originally developed for automotive perception, is adapted to the railway context, enabling the transferability of synthetic data to 3D object detection. Experimental results demonstrate promising performance, highlighting the effectiveness of synthetic datasets and domain adaptation techniques in advancing perception capabilities for railway environments.
Exploiting Edge Features for Transferable Adversarial Attacks in Distributed Machine Learning
Jul 09, 2025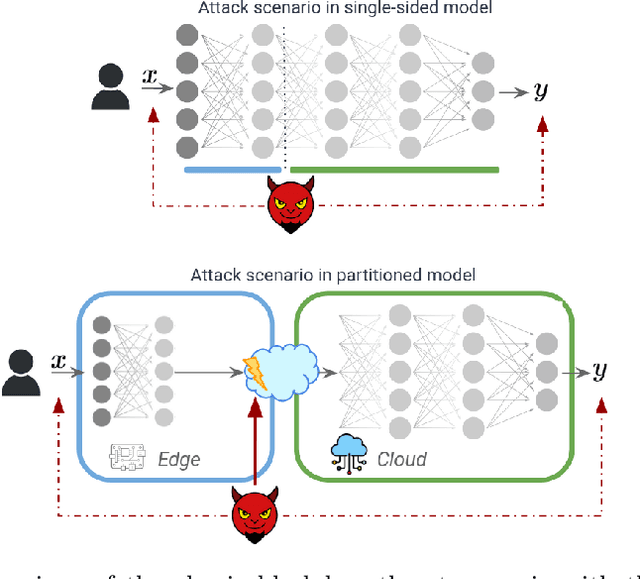
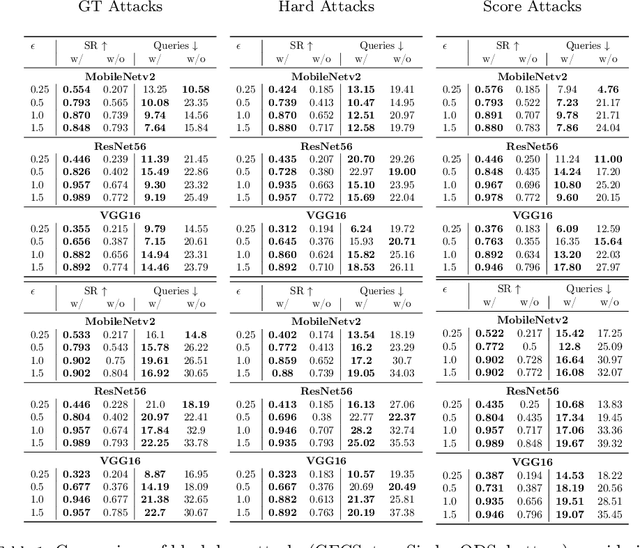
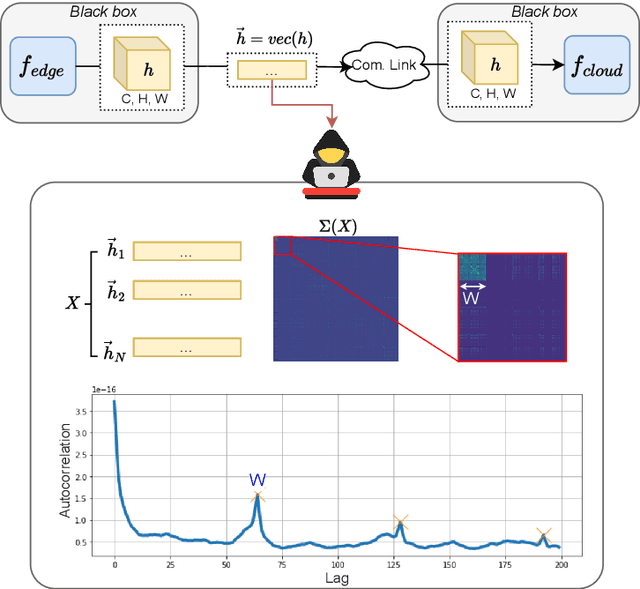
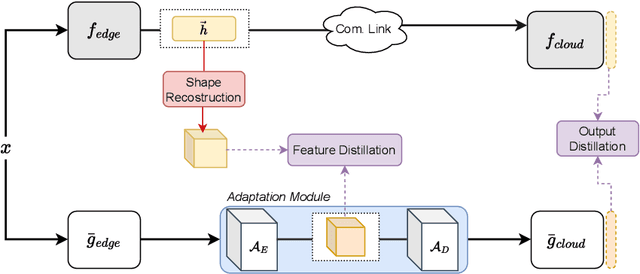
As machine learning models become increasingly deployed across the edge of internet of things environments, a partitioned deep learning paradigm in which models are split across multiple computational nodes introduces a new dimension of security risk. Unlike traditional inference setups, these distributed pipelines span the model computation across heterogeneous nodes and communication layers, thereby exposing a broader attack surface to potential adversaries. Building on these motivations, this work explores a previously overlooked vulnerability: even when both the edge and cloud components of the model are inaccessible (i.e., black-box), an adversary who intercepts the intermediate features transmitted between them can still pose a serious threat. We demonstrate that, under these mild and realistic assumptions, an attacker can craft highly transferable proxy models, making the entire deep learning system significantly more vulnerable to evasion attacks. In particular, the intercepted features can be effectively analyzed and leveraged to distill surrogate models capable of crafting highly transferable adversarial examples against the target model. To this end, we propose an exploitation strategy specifically designed for distributed settings, which involves reconstructing the original tensor shape from vectorized transmitted features using simple statistical analysis, and adapting surrogate architectures accordingly to enable effective feature distillation. A comprehensive and systematic experimental evaluation has been conducted to demonstrate that surrogate models trained with the proposed strategy, i.e., leveraging intermediate features, tremendously improve the transferability of adversarial attacks. These findings underscore the urgent need to account for intermediate feature leakage in the design of secure distributed deep learning systems.
SimPRIVE: a Simulation framework for Physical Robot Interaction with Virtual Environments
Apr 30, 2025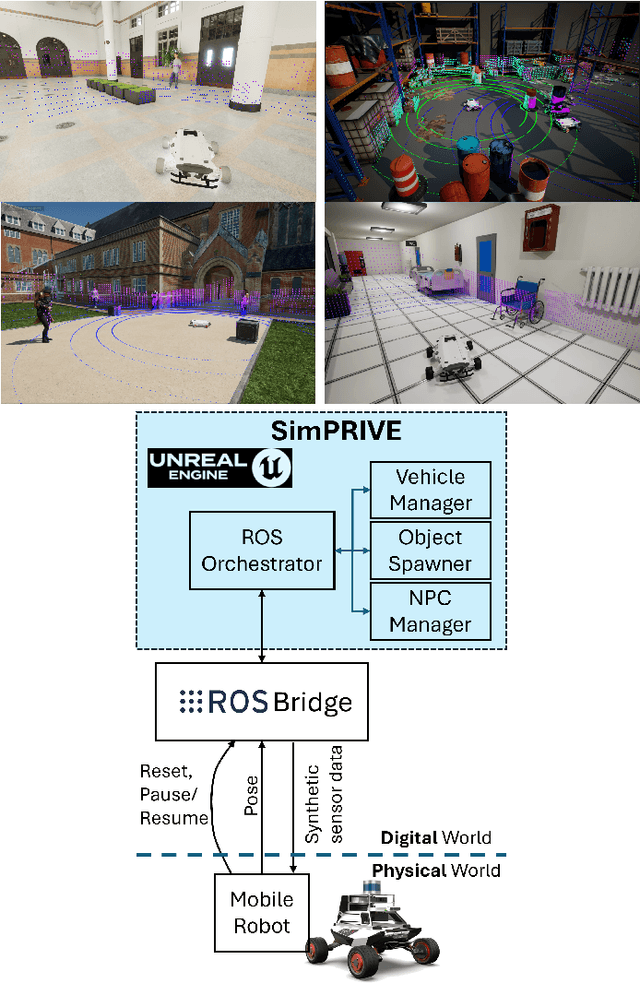
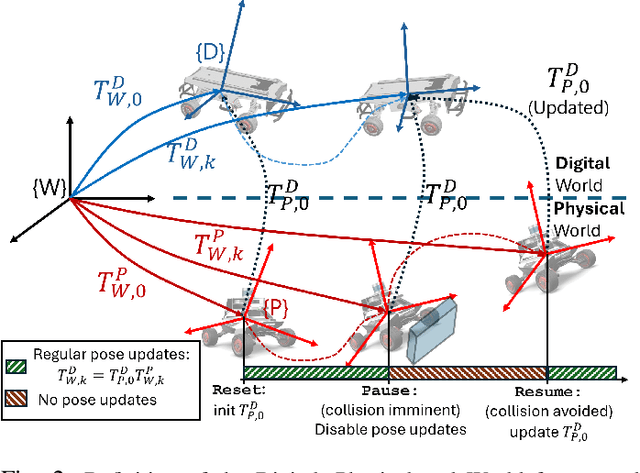
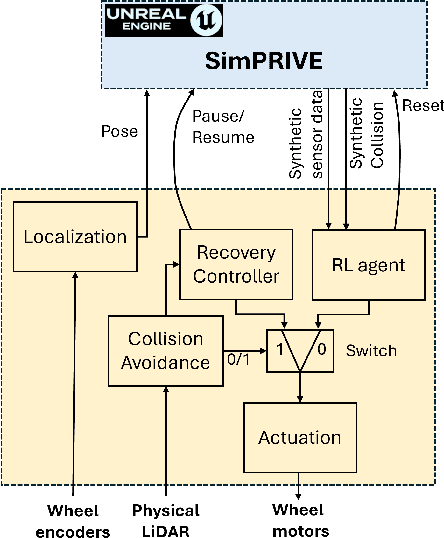
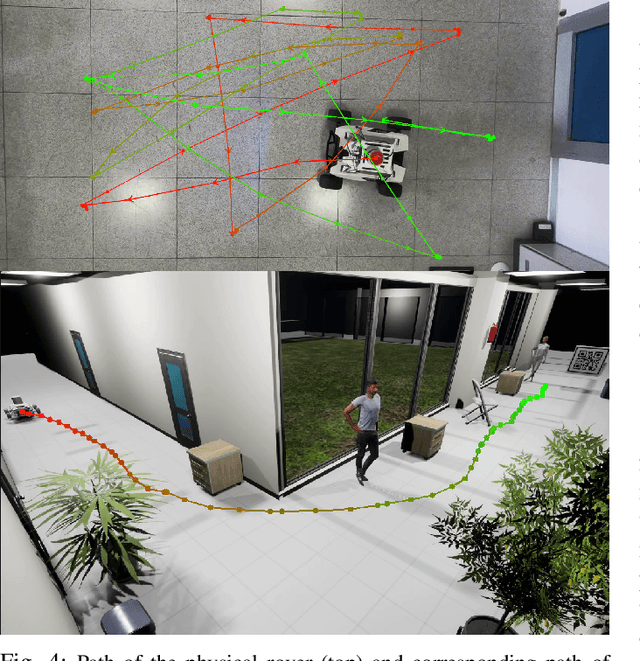
The use of machine learning in cyber-physical systems has attracted the interest of both industry and academia. However, no general solution has yet been found against the unpredictable behavior of neural networks and reinforcement learning agents. Nevertheless, the improvements of photo-realistic simulators have paved the way towards extensive testing of complex algorithms in different virtual scenarios, which would be expensive and dangerous to implement in the real world. This paper presents SimPRIVE, a simulation framework for physical robot interaction with virtual environments, which operates as a vehicle-in-the-loop platform, rendering a virtual world while operating the vehicle in the real world. Using SimPRIVE, any physical mobile robot running on ROS 2 can easily be configured to move its digital twin in a virtual world built with the Unreal Engine 5 graphic engine, which can be populated with objects, people, or other vehicles with programmable behavior. SimPRIVE has been designed to accommodate custom or pre-built virtual worlds while being light-weight to contain execution times and allow fast rendering. Its main advantage lies in the possibility of testing complex algorithms on the full software and hardware stack while minimizing the risks and costs of a test campaign. The framework has been validated by testing a reinforcement learning agent trained for obstacle avoidance on an AgileX Scout Mini rover that navigates a virtual office environment where everyday objects and people are placed as obstacles. The physical rover moves with no collision in an indoor limited space, thanks to a LiDAR-based heuristic.
Feelbert: A Feedback Linearization-based Embedded Real-Time Quadrupedal Locomotion Framework
Apr 29, 2025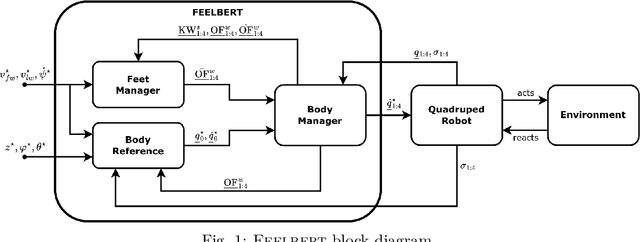
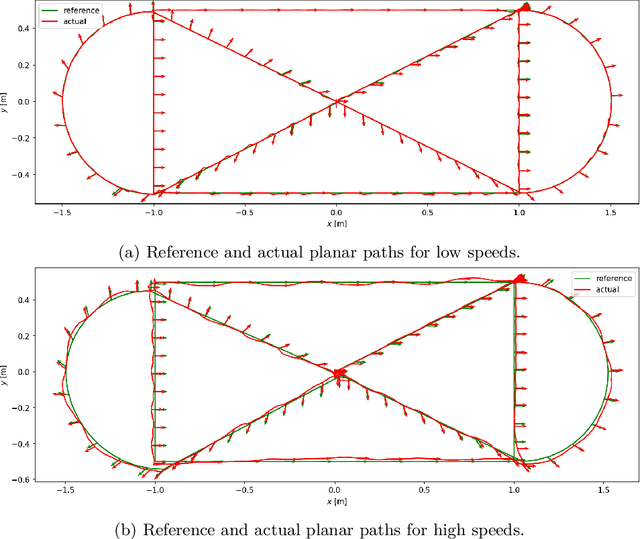
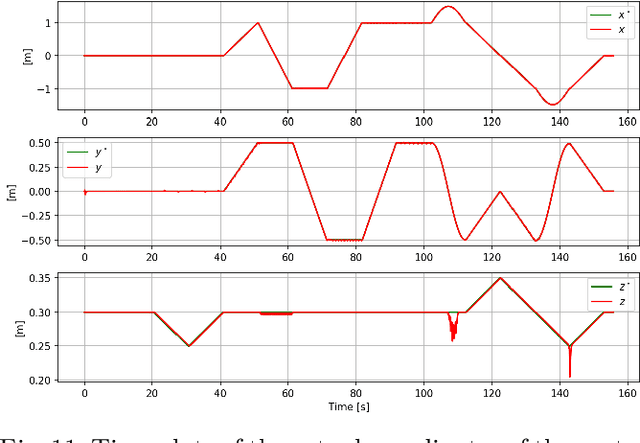
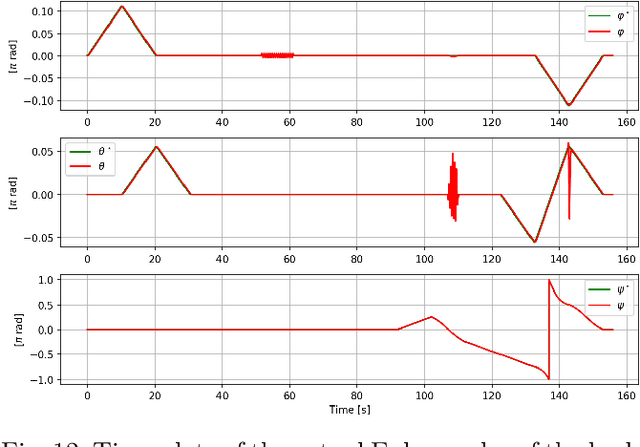
Quadruped robots have become quite popular for their ability to adapt their locomotion to generic uneven terrains. For this reason, over time, several frameworks for quadrupedal locomotion have been proposed, but with little attention to ensuring a predictable timing behavior of the controller. To address this issue, this work presents Feelbert, a modular control framework for quadrupedal locomotion suitable for execution on an embedded system under hard real-time execution constraints. It leverages the feedback linearization control technique to obtain a closed-form control law for the body, valid for all configurations of the robot. The control law was derived after defining an appropriate rigid body model that uses the accelerations of the feet as control variables, instead of the estimated contact forces. This work also provides a novel algorithm to compute footholds and gait temporal parameters using the concept of imaginary wheels, and a heuristic algorithm to select the best gait schedule for the current velocity commands. The proposed framework is developed entirely in C++, with no dependencies on third-party libraries and no dynamic memory allocation, to ensure predictability and real-time performance. Its implementation allows Feelbert to be both compiled and executed on an embedded system for critical applications, as well as integrated into larger systems such as Robot Operating System 2 (ROS 2). For this reason, Feelbert has been tested in both scenarios, demonstrating satisfactory results both in terms of reference tracking and temporal predictability, whether integrated into ROS 2 or compiled as a standalone application on a Raspberry Pi 5.
Benchmarking the Spatial Robustness of DNNs via Natural and Adversarial Localized Corruptions
Apr 02, 2025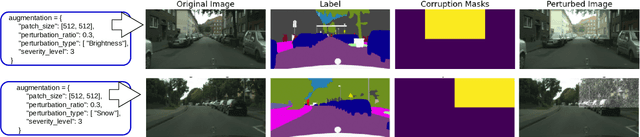
The robustness of DNNs is a crucial factor in safety-critical applications, particularly in complex and dynamic environments where localized corruptions can arise. While previous studies have evaluated the robustness of semantic segmentation (SS) models under whole-image natural or adversarial corruptions, a comprehensive investigation into the spatial robustness of dense vision models under localized corruptions remained underexplored. This paper fills this gap by introducing specialized metrics for benchmarking the spatial robustness of segmentation models, alongside with an evaluation framework to assess the impact of localized corruptions. Furthermore, we uncover the inherent complexity of characterizing worst-case robustness using a single localized adversarial perturbation. To address this, we propose region-aware multi-attack adversarial analysis, a method that enables a deeper understanding of model robustness against adversarial perturbations applied to specific regions. The proposed metrics and analysis were evaluated on 15 segmentation models in driving scenarios, uncovering key insights into the effects of localized corruption in both natural and adversarial forms. The results reveal that models respond to these two types of threats differently; for instance, transformer-based segmentation models demonstrate notable robustness to localized natural corruptions but are highly vulnerable to adversarial ones and vice-versa for CNN-based models. Consequently, we also address the challenge of balancing robustness to both natural and adversarial localized corruptions by means of ensemble models, thereby achieving a broader threat coverage and improved reliability for dense vision tasks.
Video Deblurring by Sharpness Prior Detection and Edge Information
Jan 21, 2025Video deblurring is essential task for autonomous driving, facial recognition, and security surveillance. Traditional methods directly estimate motion blur kernels, often introducing artifacts and leading to poor results. Recent approaches utilize the detection of sharp frames within video sequences to enhance deblurring. However, existing datasets rely on fixed number of sharp frames, which may be too restrictive for some applications and may introduce a bias during model training. To address these limitations and enhance domain adaptability, this work first introduces GoPro Random Sharp (GoProRS), a new dataset where the the frequency of sharp frames within the sequence is customizable, allowing more diverse training and testing scenarios. Furthermore, it presents a novel video deblurring model, called SPEINet, that integrates sharp frame features into blurry frame reconstruction through an attention-based encoder-decoder architecture, a lightweight yet robust sharp frame detection and an edge extraction phase. Extensive experimental results demonstrate that SPEINet outperforms state-of-the-art methods across multiple datasets, achieving an average of +3.2% PSNR improvement over recent techniques. Given such promising results, we believe that both the proposed model and dataset pave the way for future advancements in video deblurring based on the detection of sharp frames.