 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSDaR-AR: Enhancing Railway Perception Datasets via Multi-modal Augmented Reality
Feb 26, 2026Although deep learning has significantly advanced the perception capabilities of intelligent transportation systems, railway applications continue to suffer from a scarcity of high-quality, annotated data for safety-critical tasks like obstacle detection. While photorealistic simulators offer a solution, they often struggle with the ``sim-to-real" gap; conversely, simple image-masking techniques lack the spatio-temporal coherence required to obtain augmented single- and multi-frame scenes with the correct appearance and dimensions. This paper introduces a multi-modal augmented reality framework designed to bridge this gap by integrating photorealistic virtual objects into real-world railway sequences from the OSDaR23 dataset. Utilizing Unreal Engine 5 features, our pipeline leverages LiDAR point-clouds and INS/GNSS data to ensure accurate object placement and temporal stability across RGB frames. This paper also proposes a segmentation-based refinement strategy for INS/GNSS data to significantly improve the realism of the augmented sequences, as confirmed by the comparative study presented in the paper. Carefully designed augmented sequences are collected to produce OSDaR-AR, a public dataset designed to support the development of next-generation railway perception systems. The dataset is available at the following page: https://syndra.retis.santannapisa.it/osdarar.html
SimPRIVE: a Simulation framework for Physical Robot Interaction with Virtual Environments
Apr 30, 2025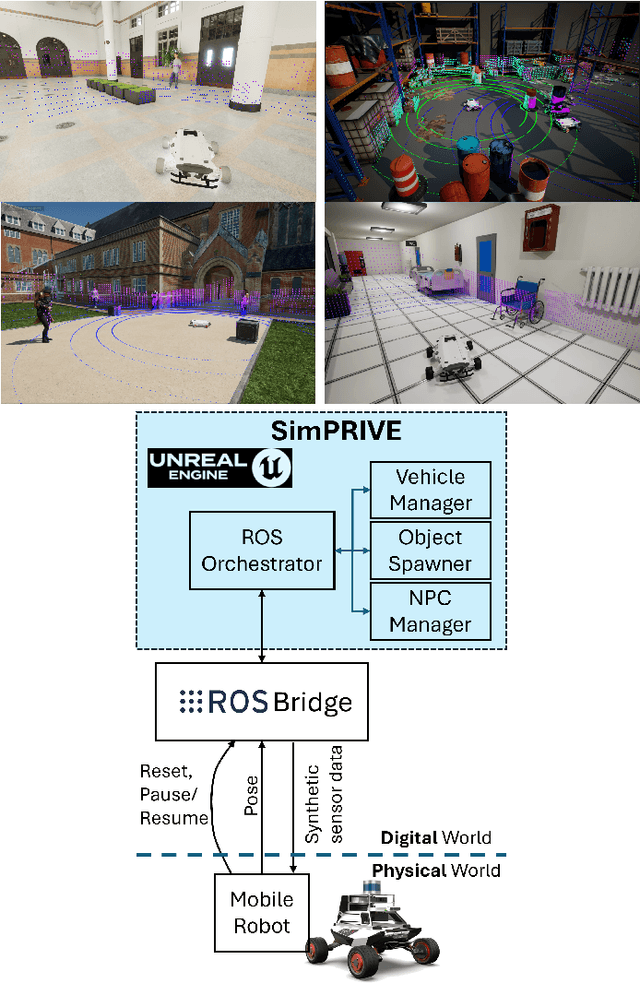
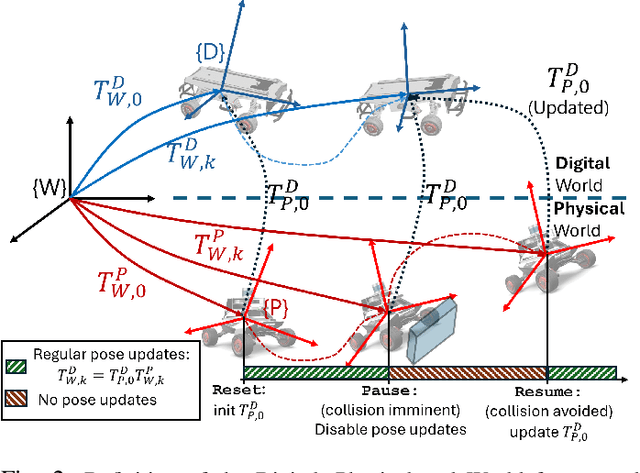
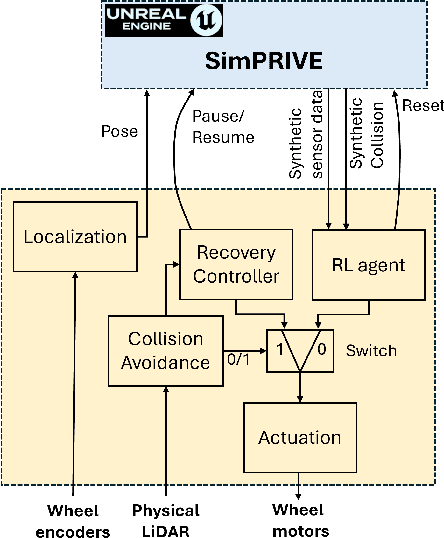
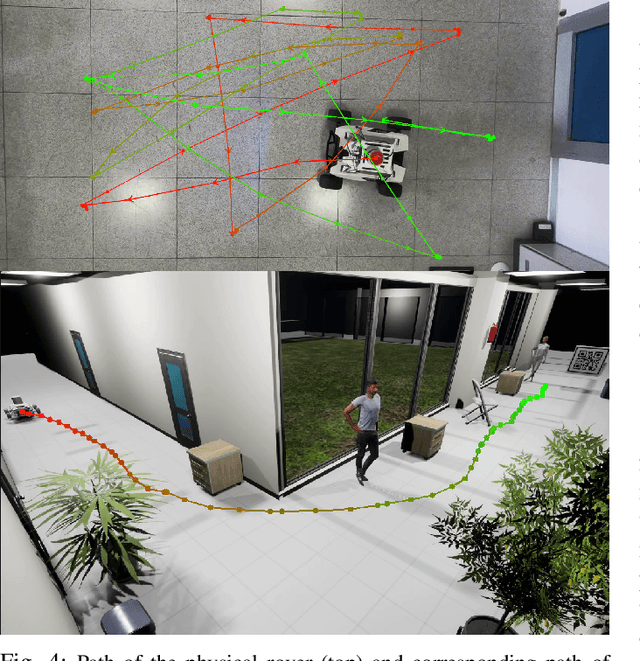
The use of machine learning in cyber-physical systems has attracted the interest of both industry and academia. However, no general solution has yet been found against the unpredictable behavior of neural networks and reinforcement learning agents. Nevertheless, the improvements of photo-realistic simulators have paved the way towards extensive testing of complex algorithms in different virtual scenarios, which would be expensive and dangerous to implement in the real world. This paper presents SimPRIVE, a simulation framework for physical robot interaction with virtual environments, which operates as a vehicle-in-the-loop platform, rendering a virtual world while operating the vehicle in the real world. Using SimPRIVE, any physical mobile robot running on ROS 2 can easily be configured to move its digital twin in a virtual world built with the Unreal Engine 5 graphic engine, which can be populated with objects, people, or other vehicles with programmable behavior. SimPRIVE has been designed to accommodate custom or pre-built virtual worlds while being light-weight to contain execution times and allow fast rendering. Its main advantage lies in the possibility of testing complex algorithms on the full software and hardware stack while minimizing the risks and costs of a test campaign. The framework has been validated by testing a reinforcement learning agent trained for obstacle avoidance on an AgileX Scout Mini rover that navigates a virtual office environment where everyday objects and people are placed as obstacles. The physical rover moves with no collision in an indoor limited space, thanks to a LiDAR-based heuristic.
Feelbert: A Feedback Linearization-based Embedded Real-Time Quadrupedal Locomotion Framework
Apr 29, 2025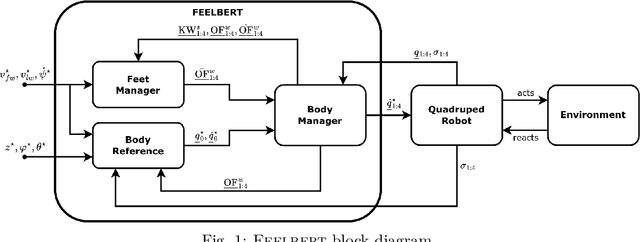
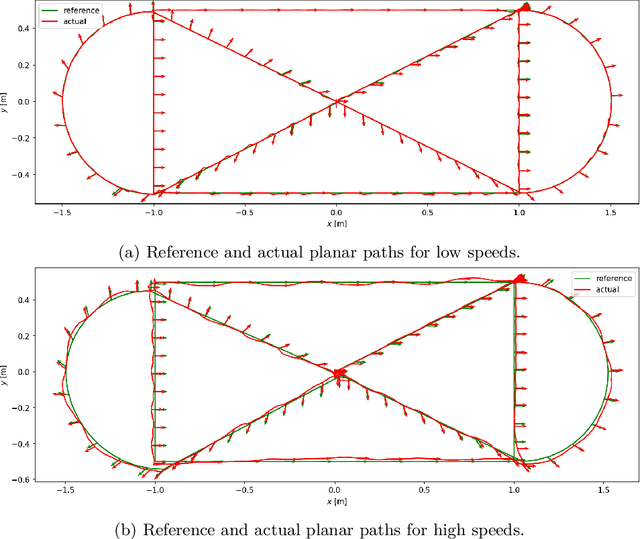
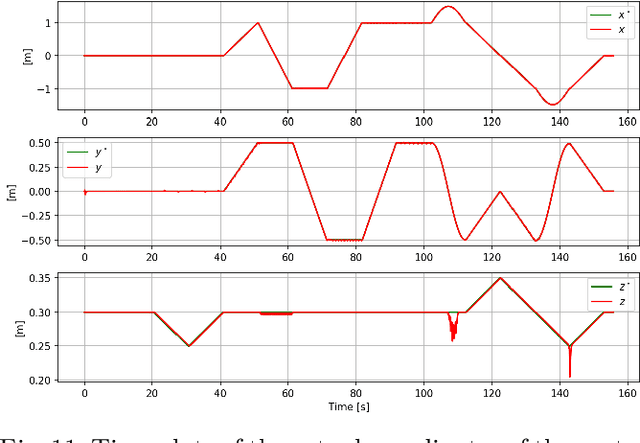
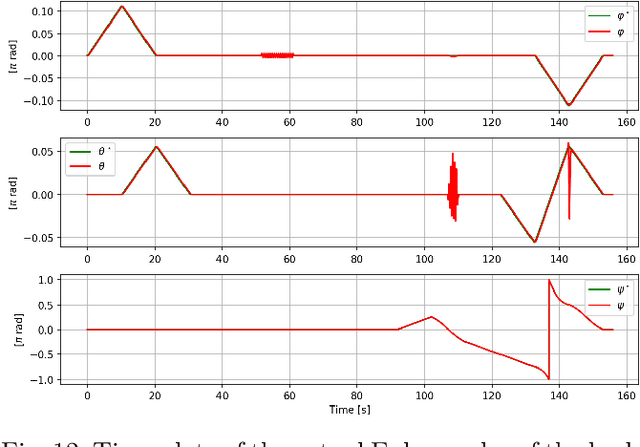
Quadruped robots have become quite popular for their ability to adapt their locomotion to generic uneven terrains. For this reason, over time, several frameworks for quadrupedal locomotion have been proposed, but with little attention to ensuring a predictable timing behavior of the controller. To address this issue, this work presents Feelbert, a modular control framework for quadrupedal locomotion suitable for execution on an embedded system under hard real-time execution constraints. It leverages the feedback linearization control technique to obtain a closed-form control law for the body, valid for all configurations of the robot. The control law was derived after defining an appropriate rigid body model that uses the accelerations of the feet as control variables, instead of the estimated contact forces. This work also provides a novel algorithm to compute footholds and gait temporal parameters using the concept of imaginary wheels, and a heuristic algorithm to select the best gait schedule for the current velocity commands. The proposed framework is developed entirely in C++, with no dependencies on third-party libraries and no dynamic memory allocation, to ensure predictability and real-time performance. Its implementation allows Feelbert to be both compiled and executed on an embedded system for critical applications, as well as integrated into larger systems such as Robot Operating System 2 (ROS 2). For this reason, Feelbert has been tested in both scenarios, demonstrating satisfactory results both in terms of reference tracking and temporal predictability, whether integrated into ROS 2 or compiled as a standalone application on a Raspberry Pi 5.
A Comparative Analysis of Visual Odometry in Virtual and Real-World Railways Environments
Mar 25, 2024



Perception tasks play a crucial role in the development of automated operations and systems across multiple application fields. In the railway transportation domain, these tasks can improve the safety, reliability, and efficiency of various perations, including train localization, signal recognition, and track discrimination. However, collecting considerable and precisely labeled datasets for testing such novel algorithms poses extreme challenges in the railway environment due to the severe restrictions in accessing the infrastructures and the practical difficulties associated with properly equipping trains with the required sensors, such as cameras and LiDARs. The remarkable innovations of graphic engine tools offer new solutions to craft realistic synthetic datasets. To illustrate the advantages of employing graphic simulation for early-stage testing of perception tasks in the railway domain, this paper presents a comparative analysis of the performance of a SLAM algorithm applied both in a virtual synthetic environment and a real-world scenario. The analysis leverages virtual railway environments created with the latest version of Unreal Engine, facilitating data collection and allowing the examination of challenging scenarios, including low-visibility, dangerous operational modes, and complex environments. The results highlight the feasibility and potentiality of graphic simulation to advance perception tasks in the railway domain.
TrainSim: A Railway Simulation Framework for LiDAR and Camera Dataset Generation
Feb 28, 2023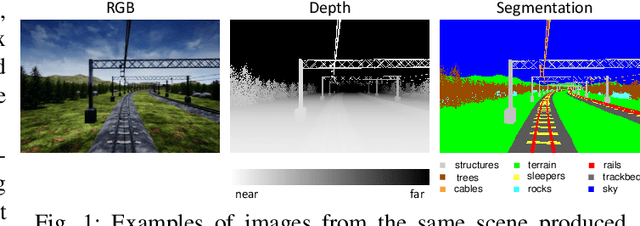
The railway industry is searching for new ways to automate a number of complex train functions, such as object detection, track discrimination, and accurate train positioning, which require the artificial perception of the railway environment through different types of sensors, including cameras, LiDARs, wheel encoders, and inertial measurement units. A promising approach for processing such sensory data is the use of deep learning models, which proved to achieve excellent performance in other application domains, as robotics and self-driving cars. However, testing new algorithms and solutions requires the availability of a large amount of labeled data, acquired in different scenarios and operating conditions, which are difficult to obtain in a real railway setting due to strict regulations and practical constraints in accessing the trackside infrastructure and equipping a train with the required sensors. To address such difficulties, this paper presents a visual simulation framework able to generate realistic railway scenarios in a virtual environment and automatically produce inertial data and labeled datasets from emulated LiDARs and cameras useful for training deep neural networks or testing innovative algorithms. A set of experimental results are reported to show the effectiveness of the proposed approach.