 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAria Digital Twin: A New Benchmark Dataset for Egocentric 3D Machine Perception
Jun 13, 2023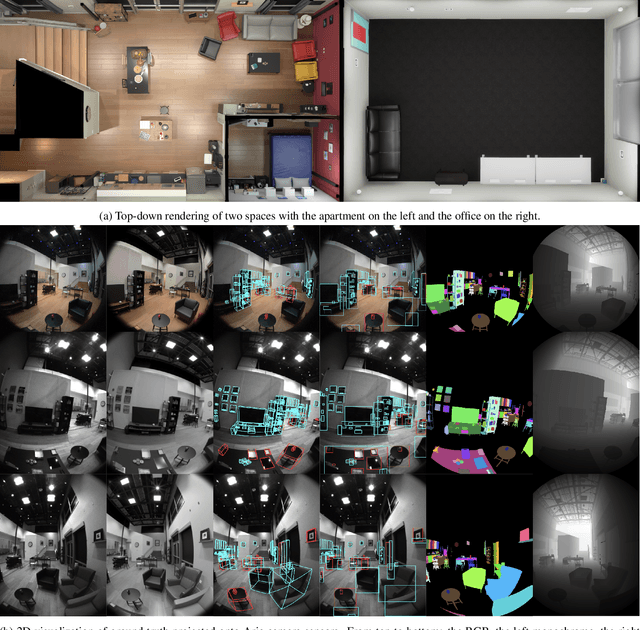
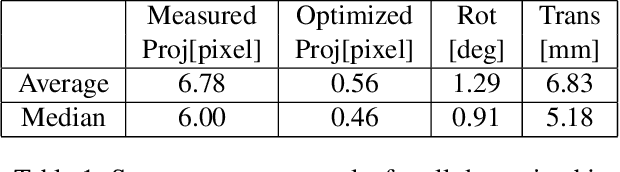
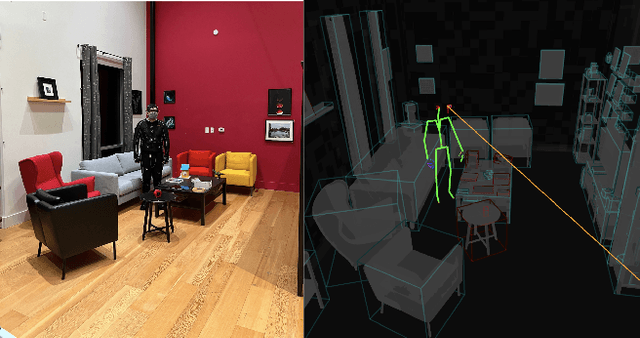
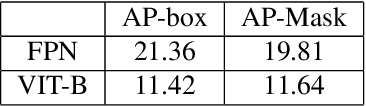
We introduce the Aria Digital Twin (ADT) - an egocentric dataset captured using Aria glasses with extensive object, environment, and human level ground truth. This ADT release contains 200 sequences of real-world activities conducted by Aria wearers in two real indoor scenes with 398 object instances (324 stationary and 74 dynamic). Each sequence consists of: a) raw data of two monochrome camera streams, one RGB camera stream, two IMU streams; b) complete sensor calibration; c) ground truth data including continuous 6-degree-of-freedom (6DoF) poses of the Aria devices, object 6DoF poses, 3D eye gaze vectors, 3D human poses, 2D image segmentations, image depth maps; and d) photo-realistic synthetic renderings. To the best of our knowledge, there is no existing egocentric dataset with a level of accuracy, photo-realism and comprehensiveness comparable to ADT. By contributing ADT to the research community, our mission is to set a new standard for evaluation in the egocentric machine perception domain, which includes very challenging research problems such as 3D object detection and tracking, scene reconstruction and understanding, sim-to-real learning, human pose prediction - while also inspiring new machine perception tasks for augmented reality (AR) applications. To kick start exploration of the ADT research use cases, we evaluated several existing state-of-the-art methods for object detection, segmentation and image translation tasks that demonstrate the usefulness of ADT as a benchmarking dataset.
The Replica Dataset: A Digital Replica of Indoor Spaces
Jun 13, 2019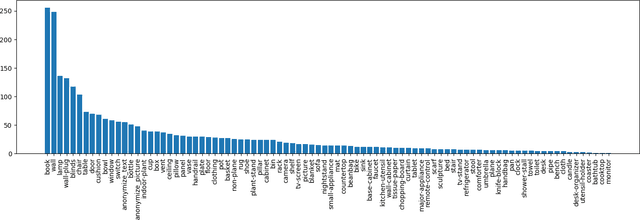



We introduce Replica, a dataset of 18 highly photo-realistic 3D indoor scene reconstructions at room and building scale. Each scene consists of a dense mesh, high-resolution high-dynamic-range (HDR) textures, per-primitive semantic class and instance information, and planar mirror and glass reflectors. The goal of Replica is to enable machine learning (ML) research that relies on visually, geometrically, and semantically realistic generative models of the world - for instance, egocentric computer vision, semantic segmentation in 2D and 3D, geometric inference, and the development of embodied agents (virtual robots) performing navigation, instruction following, and question answering. Due to the high level of realism of the renderings from Replica, there is hope that ML systems trained on Replica may transfer directly to real world image and video data. Together with the data, we are releasing a minimal C++ SDK as a starting point for working with the Replica dataset. In addition, Replica is `Habitat-compatible', i.e. can be natively used with AI Habitat for training and testing embodied agents.