 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARCTraj: A Dataset and Benchmark of Human Reasoning Trajectories for Abstract Problem Solving
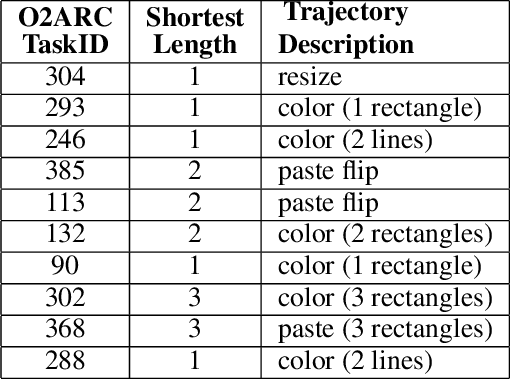
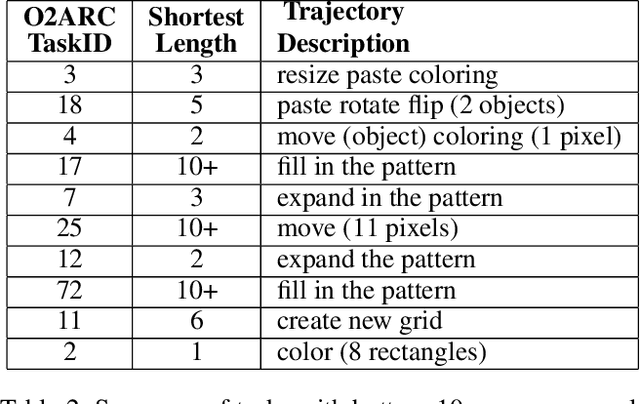
Nov 17, 2025We present ARCTraj, a dataset and methodological framework for modeling human reasoning through complex visual tasks in the Abstraction and Reasoning Corpus (ARC). While ARC has inspired extensive research on abstract reasoning, most existing approaches rely on static input--output supervision, which limits insight into how reasoning unfolds over time. ARCTraj addresses this gap by recording temporally ordered, object-level actions that capture how humans iteratively transform inputs into outputs, revealing intermediate reasoning steps that conventional datasets overlook. Collected via the O2ARC web interface, it contains around 10,000 trajectories annotated with task identifiers, timestamps, and success labels across 400 training tasks from the ARC-AGI-1 benchmark. It further defines a unified reasoning pipeline encompassing data collection, action abstraction, Markov decision process (MDP) formulation, and downstream learning, enabling integration with reinforcement learning, generative modeling, and sequence modeling methods such as PPO, World Models, GFlowNets, Diffusion agents, and Decision Transformers. Analyses of spatial selection, color attribution, and strategic convergence highlight the structure and diversity of human reasoning. Together, these contributions position ARCTraj as a structured and interpretable foundation for studying human-like reasoning, advancing explainability, alignment, and generalizable intelligence.
AMPED: Adaptive Multi-objective Projection for balancing Exploration and skill Diversification
Jun 06, 2025Skill-based reinforcement learning (SBRL) enables rapid adaptation in environments with sparse rewards by pretraining a skill-conditioned policy. Effective skill learning requires jointly maximizing both exploration and skill diversity. However, existing methods often face challenges in simultaneously optimizing for these two conflicting objectives. In this work, we propose a new method, Adaptive Multi-objective Projection for balancing Exploration and skill Diversification (AMPED), which explicitly addresses both exploration and skill diversification. We begin by conducting extensive ablation studies to identify and define a set of objectives that effectively capture the aspects of exploration and skill diversity, respectively. During the skill pretraining phase, AMPED introduces a gradient surgery technique to balance the objectives of exploration and skill diversity, mitigating conflicts and reducing reliance on heuristic tuning. In the subsequent fine-tuning phase, AMPED incorporates a skill selector module that dynamically selects suitable skills for downstream tasks, based on task-specific performance signals. Our approach achieves performance that surpasses SBRL baselines across various benchmarks. These results highlight the importance of explicitly harmonizing exploration and diversity and demonstrate the effectiveness of AMPED in enabling robust and generalizable skill learning. Project Page: https://geonwoo.me/amped/
GIFARC: Synthetic Dataset for Leveraging Human-Intuitive Analogies to Elevate AI Reasoning
May 27, 2025The Abstraction and Reasoning Corpus (ARC) poses a stringent test of general AI capabilities, requiring solvers to infer abstract patterns from only a handful of examples. Despite substantial progress in deep learning, state-of-the-art models still achieve accuracy rates of merely 40-55% on 2024 ARC Competition, indicative of a significant gap between their performance and human-level reasoning. In this work, we seek to bridge that gap by introducing an analogy-inspired ARC dataset, GIFARC. Leveraging large language models (LLMs) and vision-language models (VLMs), we synthesize new ARC-style tasks from a variety of GIF images that include analogies. Each new task is paired with ground-truth analogy, providing an explicit mapping between visual transformations and everyday concepts. By embedding robust human-intuitive analogies into ARC-style tasks, GIFARC guides AI agents to evaluate the task analogically before engaging in brute-force pattern search, thus efficiently reducing problem complexity and build a more concise and human-understandable solution. We empirically validate that guiding LLM with analogic approach with GIFARC affects task-solving approaches of LLMs to align with analogic approach of human.
Abductive Symbolic Solver on Abstraction and Reasoning Corpus
Nov 27, 2024


This paper addresses the challenge of enhancing artificial intelligence reasoning capabilities, focusing on logicality within the Abstraction and Reasoning Corpus (ARC). Humans solve such visual reasoning tasks based on their observations and hypotheses, and they can explain their solutions with a proper reason. However, many previous approaches focused only on the grid transition and it is not enough for AI to provide reasonable and human-like solutions. By considering the human process of solving visual reasoning tasks, we have concluded that the thinking process is likely the abductive reasoning process. Thus, we propose a novel framework that symbolically represents the observed data into a knowledge graph and extracts core knowledge that can be used for solution generation. This information limits the solution search space and helps provide a reasonable mid-process. Our approach holds promise for improving AI performance on ARC tasks by effectively narrowing the solution space and providing logical solutions grounded in core knowledge extraction.
DIAR: Diffusion-model-guided Implicit Q-learning with Adaptive Revaluation
Oct 15, 2024



We propose a novel offline reinforcement learning (offline RL) approach, introducing the Diffusion-model-guided Implicit Q-learning with Adaptive Revaluation (DIAR) framework. We address two key challenges in offline RL: out-of-distribution samples and long-horizon problems. We leverage diffusion models to learn state-action sequence distributions and incorporate value functions for more balanced and adaptive decision-making. DIAR introduces an Adaptive Revaluation mechanism that dynamically adjusts decision lengths by comparing current and future state values, enabling flexible long-term decision-making. Furthermore, we address Q-value overestimation by combining Q-network learning with a value function guided by a diffusion model. The diffusion model generates diverse latent trajectories, enhancing policy robustness and generalization. As demonstrated in tasks like Maze2D, AntMaze, and Kitchen, DIAR consistently outperforms state-of-the-art algorithms in long-horizon, sparse-reward environments.
Diffusion-Based Offline RL for Improved Decision-Making in Augmented ARC Task
Oct 15, 2024



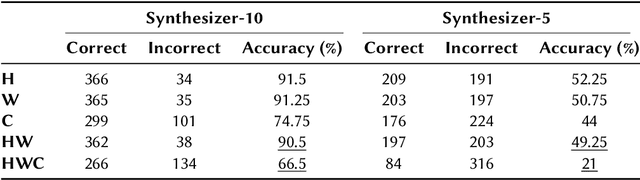
Effective long-term strategies enable AI systems to navigate complex environments by making sequential decisions over extended horizons. Similarly, reinforcement learning (RL) agents optimize decisions across sequences to maximize rewards, even without immediate feedback. To verify that Latent Diffusion-Constrained Q-learning (LDCQ), a prominent diffusion-based offline RL method, demonstrates strong reasoning abilities in multi-step decision-making, we aimed to evaluate its performance on the Abstraction and Reasoning Corpus (ARC). However, applying offline RL methodologies to enhance strategic reasoning in AI for solving tasks in ARC is challenging due to the lack of sufficient experience data in the ARC training set. To address this limitation, we introduce an augmented offline RL dataset for ARC, called Synthesized Offline Learning Data for Abstraction and Reasoning (SOLAR), along with the SOLAR-Generator, which generates diverse trajectory data based on predefined rules. SOLAR enables the application of offline RL methods by offering sufficient experience data. We synthesized SOLAR for a simple task and used it to train an agent with the LDCQ method. Our experiments demonstrate the effectiveness of the offline RL approach on a simple ARC task, showing the agent's ability to make multi-step sequential decisions and correctly identify answer states. These results highlight the potential of the offline RL approach to enhance AI's strategic reasoning capabilities.
System-2 Reasoning via Generality and Adaptation
Oct 10, 2024While significant progress has been made in task-specific applications, current models struggle with deep reasoning, generality, and adaptation -- key components of System-2 reasoning that are crucial for achieving Artificial General Intelligence (AGI). Despite the promise of approaches such as program synthesis, language models, and transformers, these methods often fail to generalize beyond their training data and to adapt to novel tasks, limiting their ability to perform human-like reasoning. This paper explores the limitations of existing approaches in achieving advanced System-2 reasoning and highlights the importance of generality and adaptation for AGI. Moreover, we propose four key research directions to address these gaps: (1) learning human intentions from action sequences, (2) combining symbolic and neural models, (3) meta-learning for unfamiliar environments, and (4) reinforcement learning to reason multi-step. Through these directions, we aim to advance the ability to generalize and adapt, bringing computational models closer to the reasoning capabilities required for AGI.
Addressing and Visualizing Misalignments in Human Task-Solving Trajectories
Sep 21, 2024

The effectiveness of AI model training hinges on the quality of the trajectory data used, particularly in aligning the model's decision with human intentions. However, in the human task-solving trajectories, we observe significant misalignments between human intentions and the recorded trajectories, which can undermine AI model training. This paper addresses the challenges of these misalignments by proposing a visualization tool and a heuristic algorithm designed to detect and categorize discrepancies in trajectory data. Although the heuristic algorithm requires a set of predefined human intentions to function, which we currently cannot extract, the visualization tool offers valuable insights into the nature of these misalignments. We expect that eliminating these misalignments could significantly improve the utility of trajectory data for AI model training. We also propose that future work should focus on developing methods, such as Topic Modeling, to accurately extract human intentions from trajectory data, thereby enhancing the alignment between user actions and AI learning processes.
Enhancing Analogical Reasoning in the Abstraction and Reasoning Corpus via Model-Based RL
Aug 27, 2024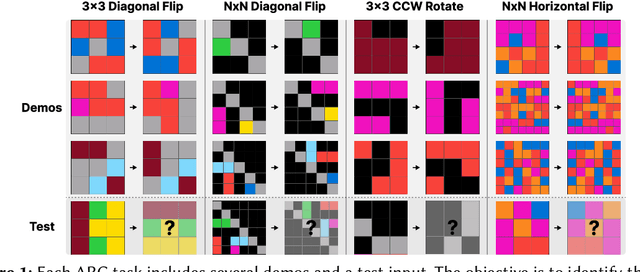
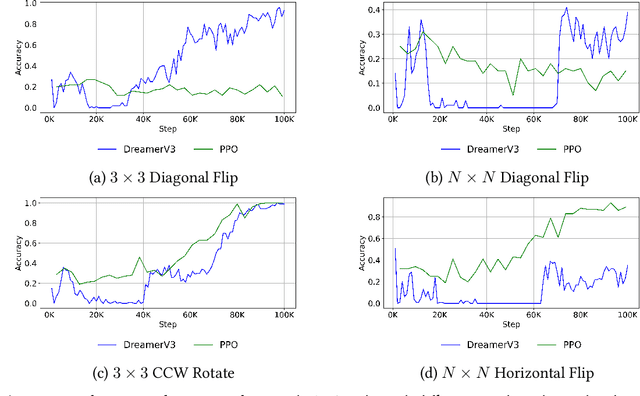

This paper demonstrates that model-based reinforcement learning (model-based RL) is a suitable approach for the task of analogical reasoning. We hypothesize that model-based RL can solve analogical reasoning tasks more efficiently through the creation of internal models. To test this, we compared DreamerV3, a model-based RL method, with Proximal Policy Optimization, a model-free RL method, on the Abstraction and Reasoning Corpus (ARC) tasks. Our results indicate that model-based RL not only outperforms model-free RL in learning and generalizing from single tasks but also shows significant advantages in reasoning across similar tasks.
ARCLE: The Abstraction and Reasoning Corpus Learning Environment for Reinforcement Learning
Jul 30, 2024



This paper introduces ARCLE, an environment designed to facilitate reinforcement learning research on the Abstraction and Reasoning Corpus (ARC). Addressing this inductive reasoning benchmark with reinforcement learning presents these challenges: a vast action space, a hard-to-reach goal, and a variety of tasks. We demonstrate that an agent with proximal policy optimization can learn individual tasks through ARCLE. The adoption of non-factorial policies and auxiliary losses led to performance enhancements, effectively mitigating issues associated with action spaces and goal attainment. Based on these insights, we propose several research directions and motivations for using ARCLE, including MAML, GFlowNets, and World Models.